Теперь в нашем онлайн-магазине доступна уникальная книга «BEAM-робототехника. От азов до создания практических устройств», идеально подходящая как для кружков робототехники, так и для самообучения дома. Вы можете приобрести её по привлекательной цене в 699 рублей. Дополнительная информация о книге доступна на нашем сайте. Также в ассортименте нашего онлайн-магазина представлены готовые наборы для сборки роботов, с помощью которых ваш ребенок сможет легко собрать своего первого робота, следуя нашим подробным инструкциям. Перейти в магазин
Хочешь собрать робота но не знаешь где достать все необходимые детали?
Закажи набор для сборки робота у нас! Мы подготовим для тебя специальный комплект, который будет включать в себя все необходимые радио-детали, датчики, моторчики, и печатные платы.
Чтобы заказать набор перейди в наш магазин и выбери наборы, которые тебе интересны
СИНУСОИД - экспериментальный одномоторный робот. Идея сборки этого робота возникла давно, стандартная модель робота использует для передвижения от двух моторов и более. Но почему бы не попробовать задействовать только один мотор, для движения за источником света. Передвижение робота на одном моторе вполне возможно, но маневрирование и движение за светом, как выяснилось реализовать не так просто.
Робот передвигается по необычной траектории напоминающую синусоиду, отсюда и название "Синусоид одномоторный".
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Напряжение питания....................9 вольт
Кол-во моторов.............................1шт.
Наведение на источник света +
Движение к источнику света +
***
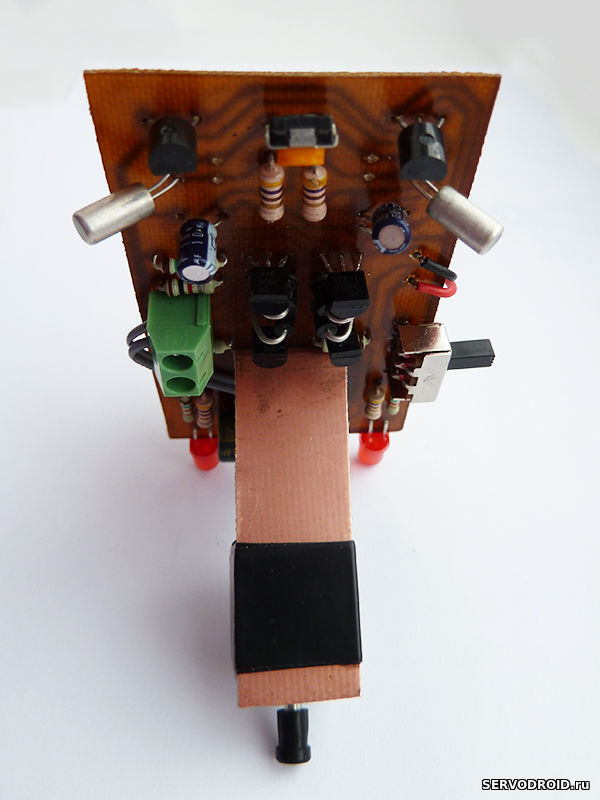
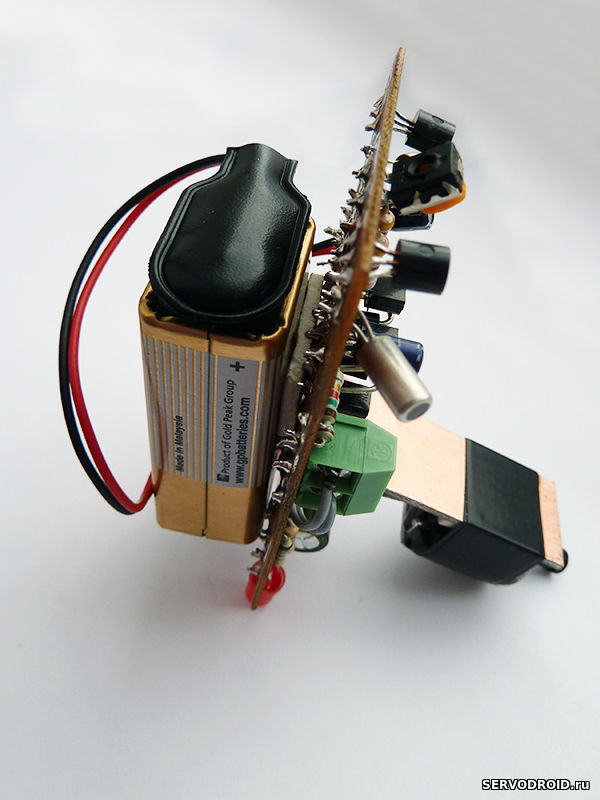
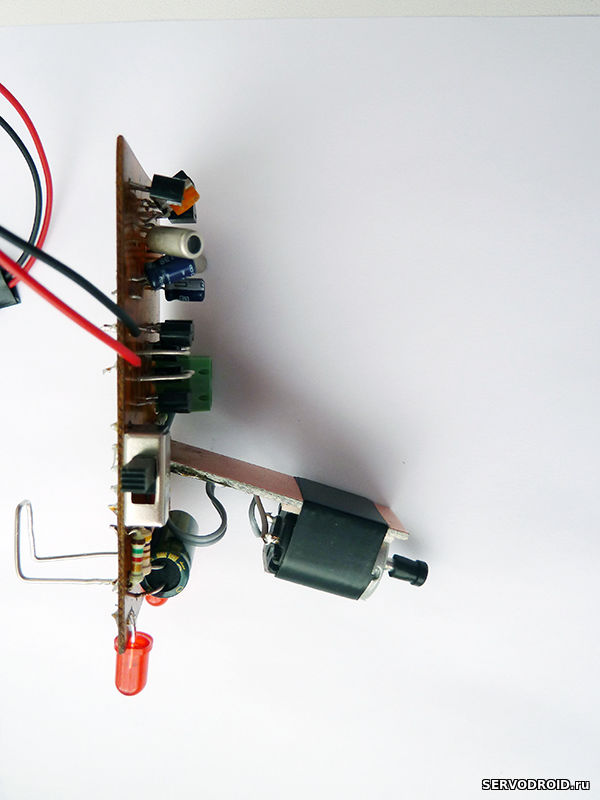
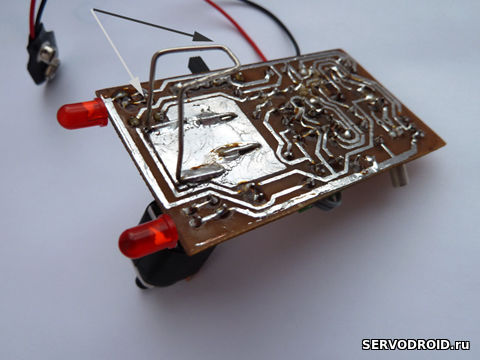
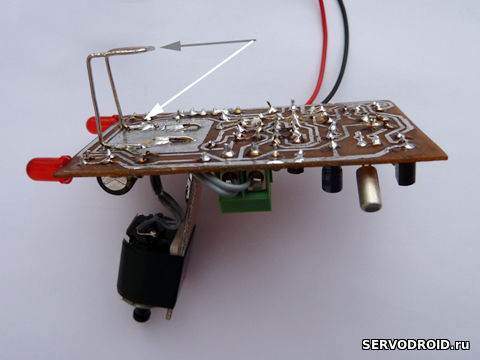
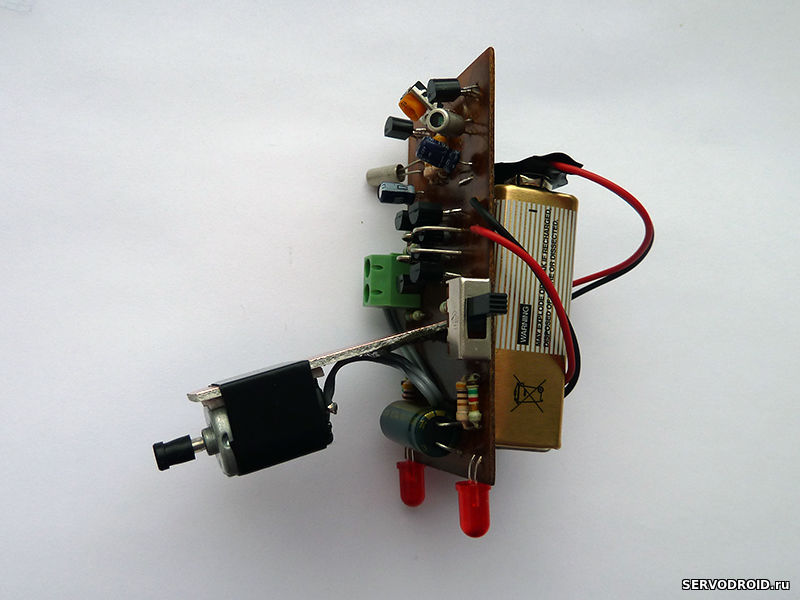
Фото.1.-4. Синусоид в разных ракурсах.
1.ВИДЕОТЕСТЫ.
На видео показано как робот ориентируется на источник света и передвигается за ним. В плейлисте 4 видеофрагмента, которые проигрываются последовательно.
Видеофрагменты 1-4
ВСЕ РОБОТЫ на канале DROID1020 !!! подпишись и смотри. Переход по ссылке жми!
ALL ROBOTS on the DROID1020 channel! ! ! be signed and look. Transition according to the link
ХАРАКТЕРИСТИКИ И ФУНКЦИОНАЛЬНОСТЬ.
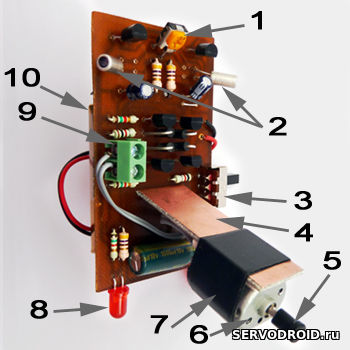
Алгоритм передвижения робота основан на инерционных эффектах возникающих при колебаниях масс. Иначе говоря, движение вперёд осуществляется за счёт ускорений при циклических поворотах влево-вправо. В момент прохождения поворота происходит проскальзывание по инерции, которое и сообщает роботу в итоге движение вперёд. Недостаточное освещение вызывает большую амплитуду движений в стороны, а избыточное (направленный источник света) повышает частоту и уменьшает амплитуду, робот начинает передвигаться, ориентируясь за источником света. На фото.3 показаны элементы и их функциональное назначение.
Фото.3. Функциональное назначение элементов.
РАДИОКОМПОНЕНТЫ И ИХ ФУНКЦИОНАЛЬНОЕ НАЗНАЧЕНИЕ
1. Подстроечный резистор (дифференциальный регулятор).
2. Фототранзисторы.
3. Выключатель питания.
4. Силовая рама (для крепежа мотора).
5. Протектор (для увеличения сцепления с поверхностью).
6. Мотор низковольтный.
7. Изоляционная лента (крепёж мотора).
8. Сигнальный светодиод (всего два).
9. Клеммник винтовой (можно не устанавливать!).
10. Батарейка типоразмера 6F22 с напряжением 9 вольт.
ПРИНЦИП РАБОТЫ.
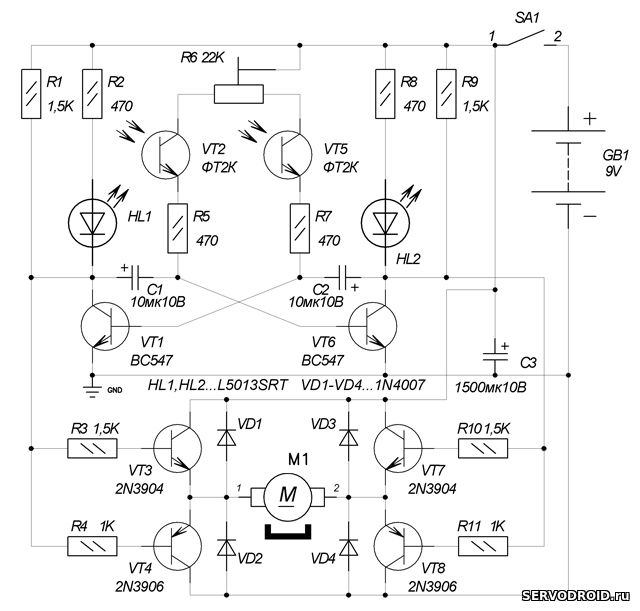
На рис.1. показана электрическая схема. Электрическая схема робота состоит из мультивибратора на транзисторах и драйвера управления двигателем. После включения питания выключателем SA1 мультивибратор на транзисторах VT1,VT6 начинает работать. Мультивибратор вырабатывает прямоугольные импульсы разной полярности, которые появляются на коллекторе транзистора VT1 и VT6. В частотозадающих цепях R5C1 и R7C2 последовательно включены фототранзисторы VT2,VT5. Пока фототранзисторы не освещены сопротивление их переходов велико, а протекающий ток невелик. Так как время зарядки и разрядки конденсаторов относительно велико, то робот совершает высокоамплитудные движения по синусоиде. При освещении допустим, фототранзистора VT2 сопротивление его перехода эмиттер-коллектор падает, усиливается протекающий ток. Это приводит к изменению времени зарядки-разрядки конденсатора C1, все процессы ускоряются. Частота импульсов на коллекторах VT1,VT6 повышается.
Рис.1. Электрическая схема.
Для управления мотором используется драйвер, по сути это мост на транзисторах VT3,VT4,VT7,VT8 с током нагрузки до 200мА. Так как вся конструкция рассчитана на малогабаритные двигатели, то этого вполне достаточно для уверенного передвижения робота по поверхности. Транзисторы моста включены в режиме повторителей сигналов, что упрощает их соединение между собой и позволяет управлять через два противофазных входа. Точка соединения резисторов R3,R4 – это первый вход управления. Точка соединения резисторов R10,R11- это второй вход управления. При включении мультивибратор вырабатывает противофазные импульсы, поэтому мост на транзисторах подключен непосредственно к его выходам (выводы коллектора VT1,VT6). Разберём прохождение управляющего сигнала. Допустим у транзистора VT1 на коллекторе положительный потенциал. В это момент на коллекторе транзистора VT6 отрицательный потенциал. Через резисторы R3 и R4 положительный потенциал с коллектора VT1 поступит на базы транзисторов VT3,VT4. Так как транзистор VT4 обратной проводимости, то положительный потенциал закроет его. А транзистор VT3 откроется положительным потенциалом и через его переход эмиттер-коллектор потечёт ток.
Одновременно отрицательный потенциал с коллектора VT6 через резисторы R10,R11 поступит на базы транзисторов VT7,VT8. Отрицательный потенциал закроет транзистор VT7 и откроет VT8. Через переход эмиттер-коллектор транзистора VT8 потечёт ток. В итоге левый по схеме вывод мотора M1 окажется, подключен через открытый переход транзистора VT3 к плюсу источника питания, а правый (по схеме) вывод через открытый переход транзистора VT8 к минусу источника питания. На клеммы мотора M1 поступит напряжение, и мотор заработает, робот придёт в движение. Вала мотора будет вращаться в одном направлении, допустим по часовой стрелке, робот поворачивает вправо. Когда на выходах мультивибратора в следующий такт его работы потенциалы изменятся, то на коллекторе VT1 окажется отрицательный потенциал, а на коллекторе VT6 положительный потенциал. Эти потенциалы откроют транзисторы VT4,VT7, а транзисторы VT3,VT8 закроют. И к правому (по схеме) выводу мотора окажется подключенным минус источника питания, а клеевому – плюс источника питания. Направление вращения вала мотора измениться, он начнёт вращаться против часовой стрелки. Робот будет поворачивать влево, до следующего такта мультивибратора. Таким образом, мультивибратор управляет направлением вращения вала мотора. В результате робот непрерывно совершает повороты то вправо, то влево.
Из-за динамического эффекта (массы и ускорения) в моменты прохождения поворотов происходит проскальзывание, которое и сообщает роботу движение вперёд. В совокупности все эти движения напоминают синусоиду. Её амплитуда при отсутствии освещения фототранзисторов максимальна, а при освещении минимальна. Поэтому при освещении лучом фонарика фототранзисторов VT2,VT5 робот продвигается вперёд мелкими шажками с более высокой частотой. Резистором R6 устанавливают дифференциальную чувствительность фототранзисторов VT2,VT5. Светодиоды HL1,HL2 индицируют работу генератора. Чтобы порог включения светодиодов не влиял на мультивибратор, в схеме установлены резисторы R1,R9. Конденсатор C3 стабилизирует работу генератора и разгружает батарейку от токовой нагрузки.
ДЕТАЛИ И МАТЕРИАЛЫ.
Печатная плата изготовлена из односторонне фольгированного листа стеклотекстолита толщиной 1-1,5мм. Размеры печатной платы 40х70мм.
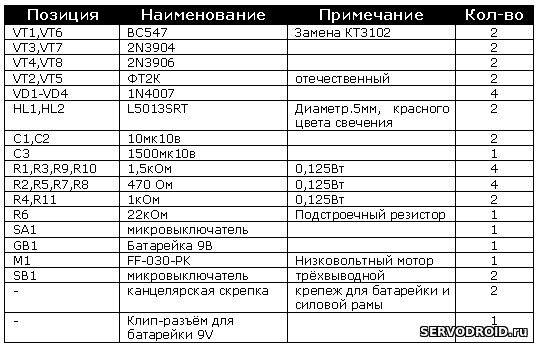
В качестве источника питания используется батарейка с напряжением 9 вольт. Её подключают к печатной плате через клипсу-разъём. Ссылка на архив с чертежами и разводкой под ЛУТ размещена в конце статьи. Список радиокомпонентов приведён в таблице.1. Таблица.1.Список радиокомпонентов. Все резисторы импортного или отечественного производства мощностью 0,125Вт. Транзисторы VT1,VT6 импортные BC547 можно заменить, на отечественные КТ3102 с любым буквенным индексом.
Конденсатор ёмкостью 1500 мкФ должен иметь рабочее напряжение не ниже 10в. С большим значением рабочего напряжения этот конденсатор выбирать не рекомендуется, так как размеры корпуса будут велики для установки на позицию. После монтажа конденсатор располагают горизонтально, т.е параллельно поверхности печатной платы. В качестве протектора для увеличения сцепления вала мотора с поверхностью, в конструкции используется резиновый колпачок от гелиевого стержня.
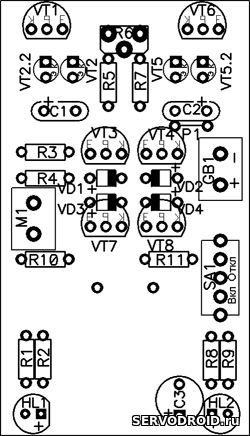
Рис.2. Чертёж монтажной платы.
МОНТАЖ СВЕТОДИОДОВ.
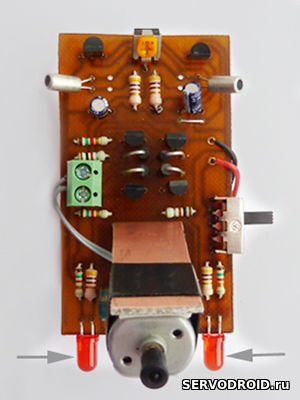
Светодиоды рекомендуются импортные диаметром корпуса 5мм красного цвета свечения. На печатную плату светодиоды устанавливают на некоторую длину выводов. После монтажа светодиоды отгибают вниз к краю печатной платы. Обратите внимание на то, что светодиоды являются двумя точками, на которые робот опирается при передвижениях. Стрелочками показаны правильно установленные светодиоды.
Фото.4.Установка и монтаж светодиодов.
УСТАНОВКА БАТАРЕИ.
Батарея устанавливается со стороны токоведущих дорожек на металлический каркас, изготовленный из скрепок. Для крепления каркаса в нижней части печатной платы предусмотрено два отверстия, а со стороны токоведущих дорожек обширная область (металлизация) покрытая фольгой. Предварительно эту область необходимо залудить.
Фото.5.Установка и монтаж крепежа батареи(вид под углом)
Фото.6.Установка и монтаж крепежа батареи (вид сбоку)
Фото.7.Установка батареи на позицию.
Чтобы изготовить каркас потребуется одна скрепка, которую нужно разогнуть в пруток. Затем складываем её пополам и придаём форму крючка. Разведите немного в стороны свободные концы скрепки. Для проведения выше указанных операций используйте инструмент. Проведите зачистку и лужение концов скрепки. Припаяйте её в области металлизации как можно ближе к нижнему краю.
КРЕПЁЖ МОТОРОВ.
Мотор установлен перпендикулярно печатной плате, на раме выполненной из фольгированного стеклотекстолита. Размеры рамы 45х15мм. До монтажа рекомендуется провести напайку соединительного провода к клеммам мотора, так как в последствии это будет сделать затруднительно.
Фото.8.Установка и крепёж мотора.
Для соединения рамы и печатной платы используйте скрепку. Её нужно разогнуть в пруток и сложить пополам, затем придать П-образную форму плоскогубцами. Свободные концы скрепки и П-образную часть лудим припоем. Крайнюю часть рамы нужно зачистить и пролудить припоем. Затем накладываем П-образную часть на лужёную фольгированную поверхность рамы и припаиваем. А свободные концы этой скрепки продеваем в отверстия, сгибаем и припаиваем. Теперь рама надёжно соединена с печатной платой.
Переходим к установке и крепежу мотора! Для устранения эффекта скольжения между мотором и рамой рекомендуется приклеить полоску двухстороннего скотча. Поместите мотор на уровне края рамы непосредственно на клейкую часть полоски и сильно прижмите. Изоляционной лентой примотайте мотор к раме с небольшим натяжением. Обратите внимание на угол наклона силовой рамы и расположение мотора на силовой раме (фото.8).
НАСТРОЙКА.
Проведите настройку робота в следующем порядке..
1. Фототранзисторы на печатной плате разведите в стороны на угол примерно 45 градусов.
2. Включите питание и посветите лучом от фонарика на фототранзисторы. Если робот поворачивает в сторону от луча и ориентируется к нему "спиной”, то поменяйте местами провода подключения к мотору.
3. Отрегулируйте подстроечным резистором R6 дифференциальную чувствительность фототранзисторов. Чувствительность фототранзисторов на свет, должна быть установлена примерно одинаковой. При правильной позиции ручки подстроечного резистора, робот будет точно поворачиваться к источнику света. При неправильной установке, робот будет ориентироваться немного в сторону (влево или право) от источника света.
4. Обратите внимание на конструктивное исполнение робота (см. фото). Он должен иметь наклон вперёд, а центр масс, батарейка размещаться сзади на креплениях. При такой позиции вал мотора разгружен, что очень важно для создания эффекта проскальзывания, и в конечном счёте движения вперёд. Если углы наклонов или размещение батарейки значительно отличается от приведённых на фотографиях, то обязательно исправьте и сделайте как в оригинале.
5. Вы должны знать, что использование для питания робота "севшей” батарейки осложняет настройку, и не гарантирует его работоспособность.
В архиве:монтажный чертёж печатной платы, термоклише для лут-перевода печатной платы.
Ниже ссылка на архив:
Архив к статье "синусоид одномоторный" пароль не требуется. Все чертежи в точных размерах, не изменять, не редактировать! Размер архива 343.5Kb Скачать архив
Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований.
Мы очень рады,
что наши статьи помогут тебе - начинающему робототехнику, освоить эту интереснейшую сферу и прокачать свой скилл в этом направлении. Также хотим отметить, что по данным статьям мы - разработчики сайта SERVODROID проводим занятия в бесплатных кружках робототехники, и нам очень нравится учить и рассказывать что такое BEAM-робототехника всем желающих.
Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;)
Общайтесь с друзьями в нашем Online-чате по робототехнике
Мы рады, что в России открывается все больше кружков по робототехнике и мы стараемся прикладывать к этому свои усилия начиная с 2008 года :) Мы будем очень рады видеть в чате живое общение, обмен опытом между учащимися в робототехнике и просто увлеченными в этом направлении людей. Мы всегда онлайн, приходите, спрашивайте, помогайте другим - давайте сделаем Мир чуточку лучше!
Чтобы не потерять чат и быть всегда с нами на связи - откройте окно чата в новом окне браузера и добавьте его в заколадки. Открыть в новом окне