16:07 WALKER-2M | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 WALKER-2M - двухмоторный ходячий робот. Одной из сложных технических задач является способность роботов к передвижению по неровной поверхности. Во всём мире идут интенсивные работы по преодолению этой проблемы, различными способами. Результаты данных усилий воплощаются в известных моделях Японской фирмы Sony, которые неоднократно демонстрировались по телевидению.$CUT$ На примере данной модели робота предпринята попытка, разрешить проблему передвижения за счёт использования биологической модели походки аналогичной насекомому. Робот walker имеет простейшие адаптивные способности и может приспосабливаться к некоторым воздействиям окружающей среды. Например, способен передвигаться к источнику света или поворачивать при соприкосновении с окружающими предметами. ЧТО МОЖЕТ РОБОТ WALKER?
***
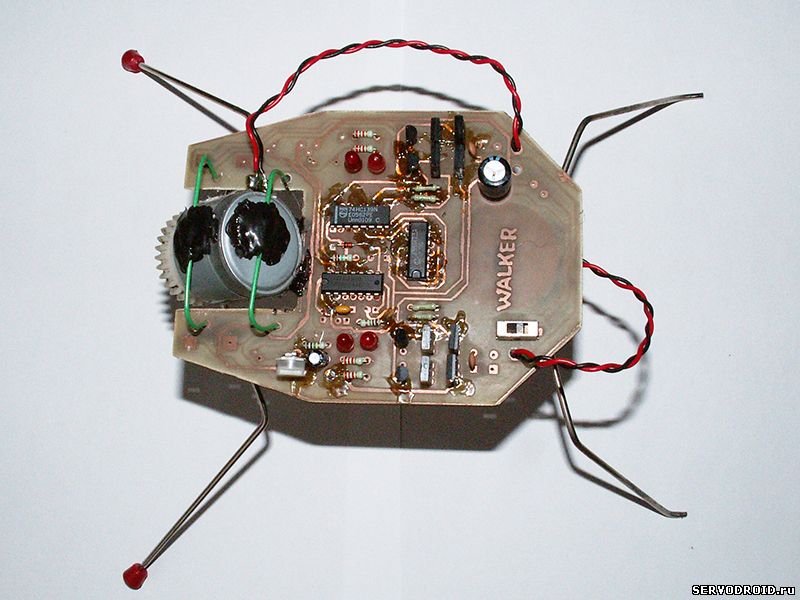
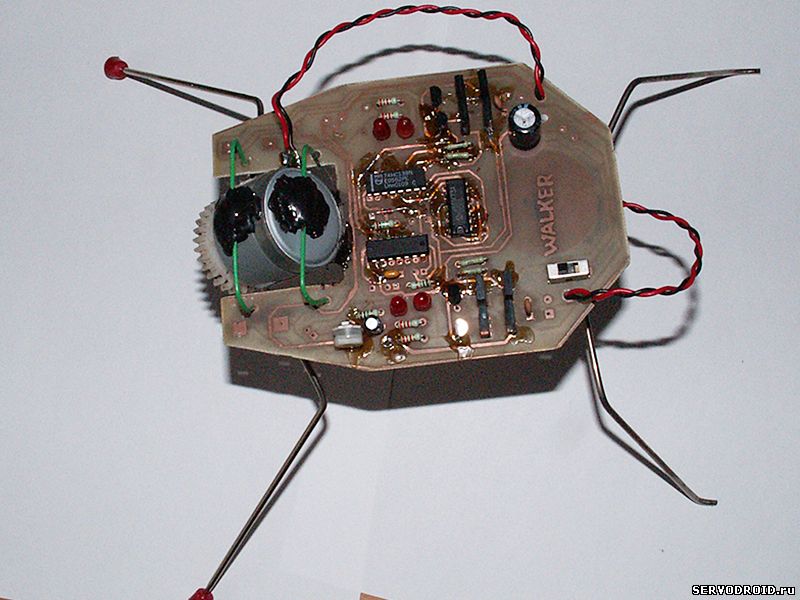
1.КОНСТРУКЦИЯ И ФУНКЦИОНАЛ. Кибернетический жук представляет собой подобие биологического жука. Он способен взаимодействовать с окружающей средой с помощью внешних датчиков и рефлексивного поведения. Как и живой организм, кибернетический жук имеет силовую часть – моторы, интеллектуальный модуль, сенситивные датчики обратной связи, источник энергии (аккумулятор). Исходя из поставленной задачи и экономичного подхода. Модель робота выполнена из двухстороннего куска стеклотекстолита, который является так же и платформой для установки двигателей.
нажимайте фото для просмотра в полном размере.
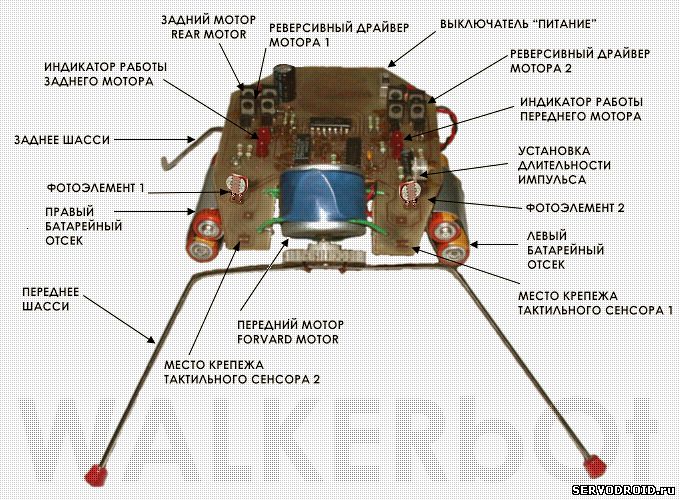
Технически робот состоит из: основной печатной платы с радиокомпонентами, двух электродвигателей, двух шасси, тактильных и фотодатчиков, источника энергии (4 элемента по 1,5V с общим напряжением 6 вольт).
Функциональное назначение основных компонентов кибернетического жука.
Табл.1.Технические характеристики.
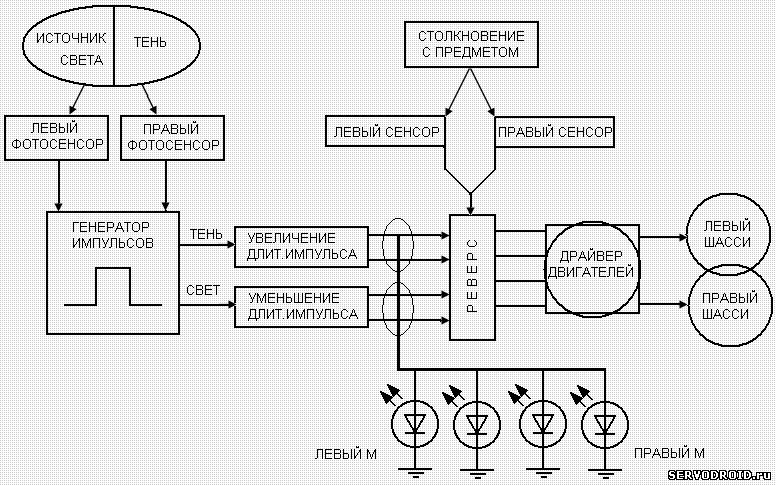
2.ПРИНЦИП РАБОТЫ. А теперь разберем, как работает кибернетический жук. Интеллект данной модели жука построен на трёх основных и одном второстепенном рефлексе. Они активируются при взаимодействии с внешней окружающей средой (свет, тень, предметы). Особенность этой модели кибернетического жука состоит в необычной схеме передвижения, которая позволяет ему передвигаться по любой неровной поверхности, преодолевать (перешагивать) небольшие препятствия. Эта схема передвижения взята из биологии обыкновенного насекомого. При этом подходе двигатели установленные на роботе, управляются импульсами одинаковой или различной длительности. В зависимости от уровня освещённости одного из фоторезисторов. Импульсная схема управления двигателями более экономична, чем непрерывная подача энергии на двигатели и позволяет продлить срок службы источника питания. Интеллект кибернетического жука включает в себя: рефлекс фототропизма (поиск источника света), тактильный рефлекс (реакция на прикосновения), способность к преодолению препятствий (реверс), рефлекс “шаг жука”, световые рефлексы сигнальной системы.
Далее приводится подробное описание принцип работы и основных рефлексов жука. Световые рефлексы сигнальной системы жука. Четыре светодиода сигнальной системы робота выдают информацию о длительности импульсов поступающих на двигатель от генератора на каждое шасси. По светодиодам можно визуально наблюдать работу генератора импульсов. Тактильный рефлекс. При соприкосновении с предметами кибернетический жук начинает поворачивать в сторону и таким образом обходит их. Активация этого рефлекса вызывается при замыкании контактных сенсорных усов расположенных во фронтальной части. Рефлекс фототропизма. Кибернетический жук способен обнаружить источник света и передвигаться в его направлении. Происходит это при попадании света на фотоэлементы расположенные в передней части жука. Если свет падает на один из фотоэлементов, то жук поворачивает в сторону наибольшей освещённости. Если источник света освещает оба фотоэлемента, то жук ускоренно передвигается в направлении этого источника. Таким образом, кибернетический жук способен передвигаться за источником света, например лучом от карманного фонарика. Походка насекомого. Особый способ передвижения жука шажками позволяет экономить энергию батарейки и приблизить принцип управления силовой частью как у биологического жука. На модели жука установлено два двигателя, которые управляются разнополярными импульсами от генератора. Импульсы поступают на двигатели с небольшой задержкой относительно друг друга.
ПРИНЦИПИАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ СХЕМА.
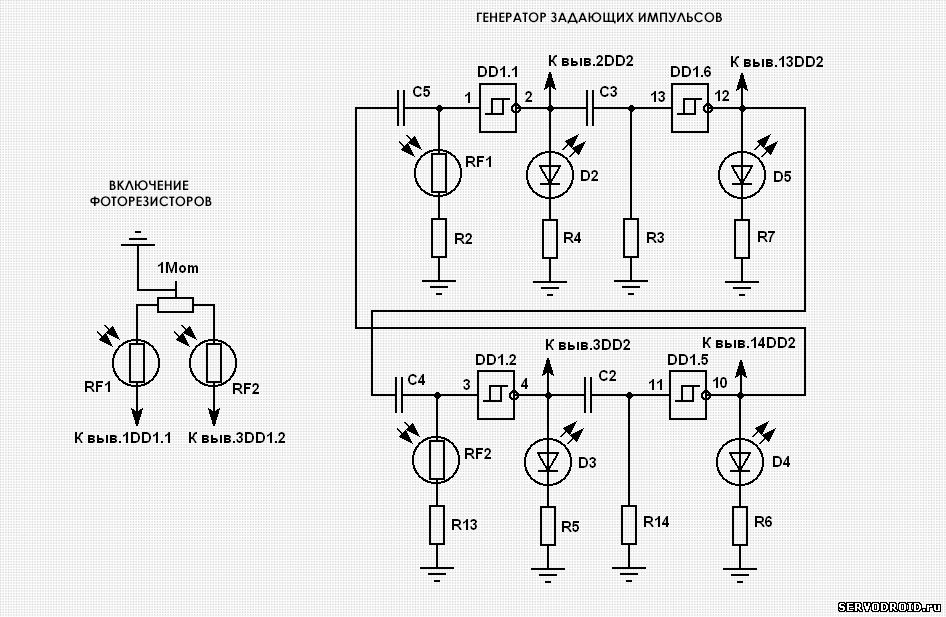
Электрическая схема жука построена на основе: трёх цифровых микросхем, которые осуществляют обработку информации с датчиков и подают команды на управление двигателями, а также на сигнальную систему. Все радиокомпоненты размещаются на одной печатной плате. Рис.2 Электрическая схема управляемого генератора импульсов.
Генератор импульсов выполнен на четырёх элементах DD1.1, DD1.2, DD1.5, DD1.6 соединенных в кольцо. Проследить работу генератора можно по светодиодам D2-D5, которые непосредственно подключены к четырём выходам генератора. Так как с выхода генератора поступают импульсы управления двигателями, то светодиоды вспыхивают при каждом импульсе. Сигнализируя нормальное прохождение импульсов с генератора. Таким образом, светодиоды D2-D5 позволяют контролировать состояние генератора. Генератор управляется при помощи двух фоторезисторов RF1,RF2, которые подключены к зарядно-разрядным RC-цепям. При изменении уровня освещённости одного из фоторезисторов изменяется время зарядки конденсаторов C4,C5, а, следовательно, и длительность импульсов на выходах элементов DD1.1 и DD1.2. Таким образом, меняется длительность импульса идущего на драйвер соответствующего двигателя. Шаг жука будет больше или меньше, и он начинает заворачивать в одну из сторон. Кибернетический жук будет поворачивать в ту сторону, в которой длительность импульса идущего на шасси меньше. С выходов элементов DD1.1, DD1.2, DD1.5, DD1.6 снимается полезный сигнал для управления двигателями и поступает на микросхему DD2. При включении питания генератор импульсов на микросхеме DD1 начинает работать и подаёт импульсы тока на драйверы двигателей VT1-VT12 через модуль управления DD2,DD3. Причём импульсы на каждый из двигателей следуют с небольшой задержкой относительно друг друга.
Рис.3 Электрическая схема модуля управления.
Модуль управления состоит из двух микросхем DD2 и DD3. Микросхема DD2 используется в качестве буферного усилителя сигнала с генератора и выполняет установку генератора в рабочий режим. Установка рабочего режима генератора выполняется резистором R1, конденсатором C1 и логическим элементом DD1.4. При включении питания происходит зарядка конденсатора C1 через резистор R1 и подача единичного уровня (на время зарядки) через диод на вход генератора. Одновременно единица на выводе 8 элемента DD1.4 запрещает работу микросхемы DD2 через выводы 1и 15. После того как конденсатор C1 зарядится до уровня единицы, диод закроется нулевым уровнем, и генератор начинает работать. Одновременно на выводы 1 и 15 микросхемы DD2 поступит разрешающий нулевой уровень, и микросхема начнёт работать, пропуская импульсы с генератора. Микросхема DD3 играет роль обычного переключателя, меняя местами импульсы на входе транзисторного драйвера. При соприкосновении с объектом замыкаются контакты SB2, конденсатор C8 заряжается и логический нолик на входе элемента DD1.4 сменяется на единицу. При этом на выходе элемента DD1.4 появляется логический нолик. Таким образом, изменяются логические уровни на управляющих входах микросхемы DD3, и она переключает свои выходы. Кибернетический жук начинает поворачивать. Время в течение, которого будет выполняться реверс, определяется цепочкой R12C8. Для осуществления реверса, при столкновении с предметами, на платформе установлены сенсорные датчики-усы. При замыкании, сенсорных датчиков меняются логические уровни на элементе микросхемы DD2, которая переключает двигатели на реверс. При этом происходит движение жука в сторону. Через некоторое время, после того как конденсатор C8 зарядится через резистор R12, логические уровни вновь поменяются на исходные, и жук будет двигаться в прежнем направлении.
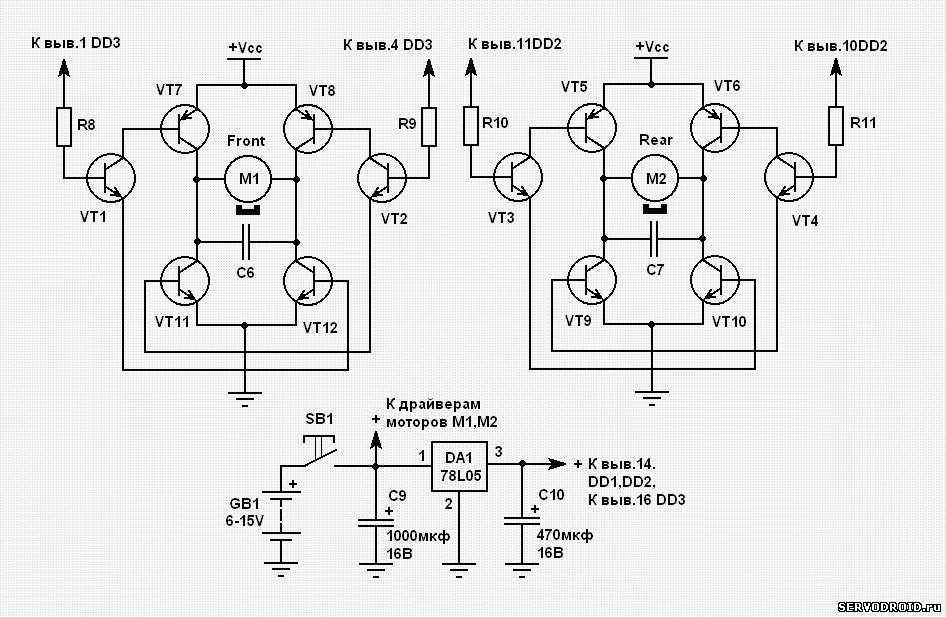
Рис.4 Электрическая схема транзисторного драйвера двигателей, источника стабилизированного питания.
Реверсивное управление двигателями выполняют два одинаковых транзисторных драйвера. Задача драйвера – усиление управляющего сигнала по току. Для обеспечения большей нагрузочной способности двигатели коммутируют транзисторы большой мощности. Подключенные на выходах двигатели совершают качающиеся движения, которые вызывают движение робота. Все микросхемы питаются напряжением 5 вольт через стабилизатор напряжения от батареек. Драйверы двигателей питаются большим напряжением, так как подключены напрямую. Составной источник питания выбран в связи с большим током нагрузки в импульсе при работе двигателей.
3.ДЕТАЛИ И МАТЕРИАЛЫ.
Так как рисунок токоведущих дорожек выполнен на двухсторонней печатной плате, необходимо придерживаться техпроцесса при изготовлении ПП (печатной платы). Опускаю весь процесс подготовки и изготовления печатной платы, так как конструкция рассчитана на подготовленных. Но обращаю ваше внимание, что изготовление двусторонней печатной платы не сильно отличается от изготовления односторонней печатной платы. Вам только потребуется выполнить два перевода методом ЛУт один за другим (последовательно) с небольшим интервалом в 3-5 минут. Также необходимо правильно установить распечатанные рисунки токоведущих дорожек для термического перевода. Относительно точную установку рисунков можно выполнить ориентируясь по четырём углам печатной платы. В архиве три файла: termo_bottom - рисунок для термического перевода нижней части печатной платы, termo_top - рисунок для термического перевода верхней части печатной платы, montag - рисунок для установки и монтажа радиокопонентов. После перевода на обе стооны можно провести сверление и чистку поверхности. В конце можно выполнить непосредственную наклейку рисунка монтажной платы на поверхность печатной платы. Тогда установка и монтаж радикомпонентов будет не сложной.
Табл.2 Список радиокомпонентов.
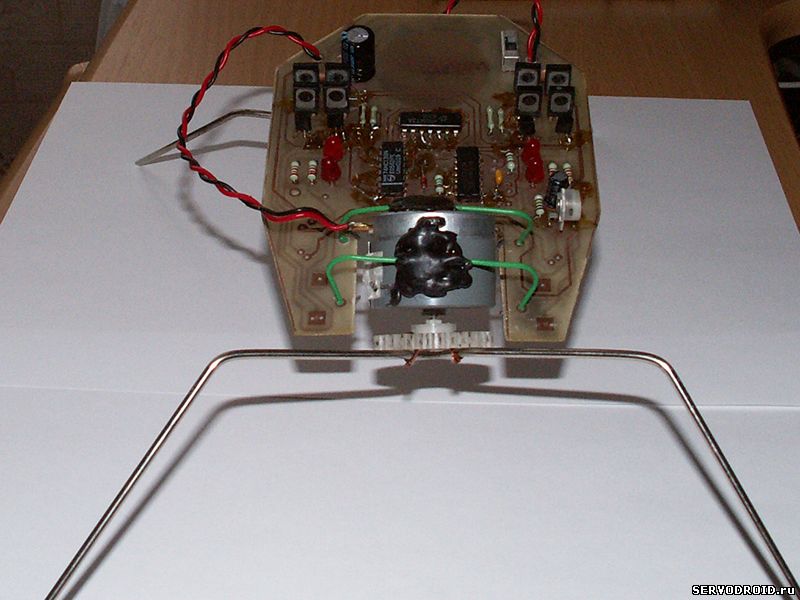
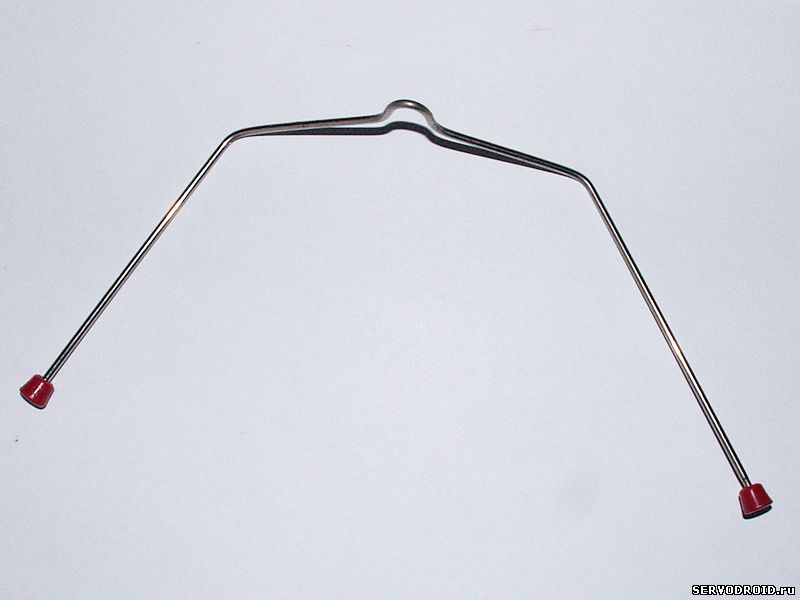
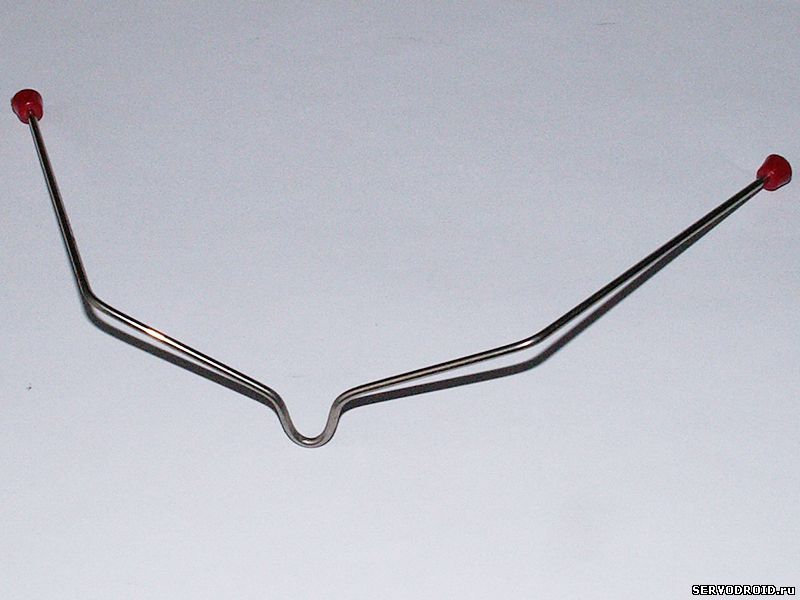
4.КОНСТРУКЦИЯ ШАССИ. Шасси выполнено из толстой вязальной спицы выгнутой в тисках в форму представленную на фото.8(внизу). Чтобы при движении по поверхности не происходило проскальзывания рекомендуется на концы iустановить резиновые муфты. Центральная часть шасси крепиться к большой пластмассовой шестерне. Для этого необходимо проделать в шестерне два отверстия. Далее с помощью толстой проволоки(или клея) надёжно зафиксировать шасси.
Особенность установки: передние ноги устанавливают под большим углом, чем задние. В качестве моторов рекомендуется использовать только сервоприводы, можно самые дешёвые по цене.
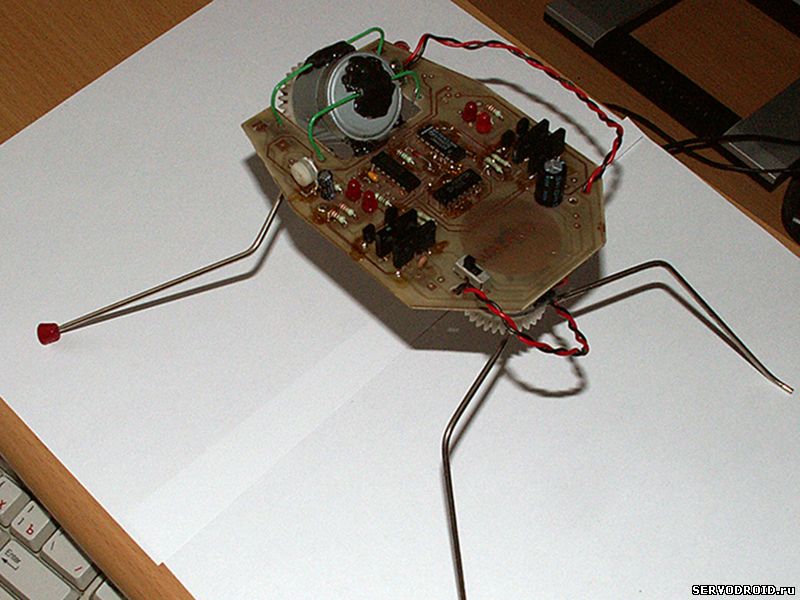
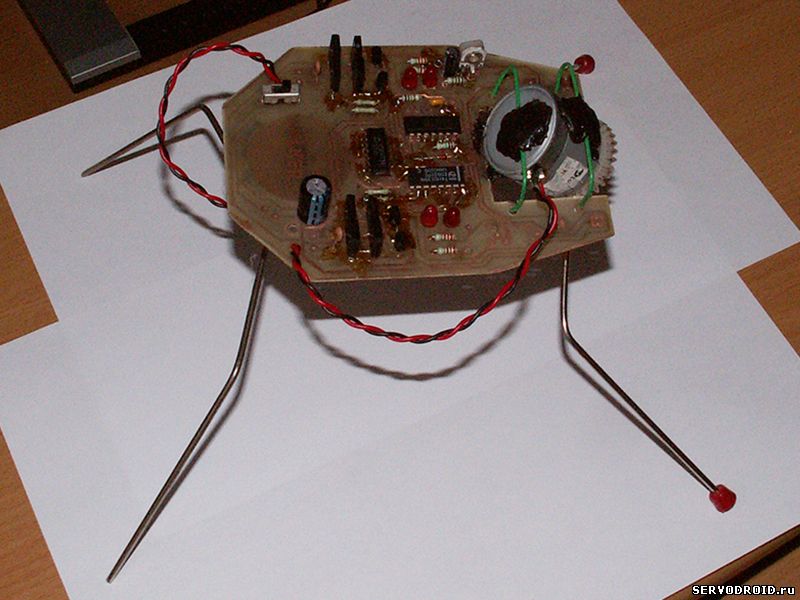
5.УСТАНОВКА МОТОРОВ. После крепежа шасси, моторы необходимо прикрепить к печатной плате. Первый мотор крепят спереди (см.фото), второй сзади (под печатной платой) на позиции с разметкой (см. рисунок печатной платы). Рядом с позициями предусмотрены отверстия. Можно использовать разные варианты креплений, которые вам доступны, главное чтобы мотор был жёстко закреплён на печатной плате. Моторы подключают к позициям на печатной плате (см. монтажный чертёж). Для позиций на чертеже XTM1F -подключение переднего мотора, XTM2R-разъём подключения заднего мотора.
6.ИСТОЧНИК ПИТАНИЯ. В качестве источника питания использованы 4 гальванических элемента (батарейки) по 1,5в каждая. Суммарное напряжение источника питания 6 вольт. Батарейки могут быть любого типоразмера 2А или 3А, и крепятся попарно слева и справа по сторонам печатной платы. На поверхности платы для этого предусмотрены отверстия под винты M3. Рекомендуется установить батарейки в двухсекционные футляры. А футляры в свою очередь, крепить в боковых частях, под печатной платой с помощью любого доступного крепежа. После этого необходимо соединить все батарейки последовательно с помощью монтажного провода для получения общего напряжения 6 вольт. Источник питания подключают (см. монтажный чертёж) к отверстиям на позиции GB1.
В архиве: монтажный чертёж печатной платы, термоклише для лут-перевода печатной платы.
Архив к статье "Walker-2M" пароль не требуется. Все чертежи в точных размерах, не изменять, не редактировать! Размер архива 834Kb Скачать архив Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим! автор Алексей Высоковольтный www.servodroid.ru © Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено! Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований. Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


| Всего комментариев: 0 | |