|
Делаем механический захват для робота
|
|
Администраторы
3417 сообщений
Мужчина
|
Схемы, примеры, идеи
|
|
|
|
|
|
БЛОГГЕР
340 сообщений
Мужчина
|
Народ, есть маленькая проблемка с захватом, поможете? Надо просто пофантозировать на тему: что можно сделать из ПКЛа, жести, болтов/гаек, мотора от сидюка и Н-моста. Космических параметров захвату не надо, он будет нужен для мелких и лёгких предметов которые будет волочить за собой робот. Моя проблема не могу придумать механику... То что сейчас планирую поставить откровенно говоря - порнография. Надеюсь на ваши подсказки 
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
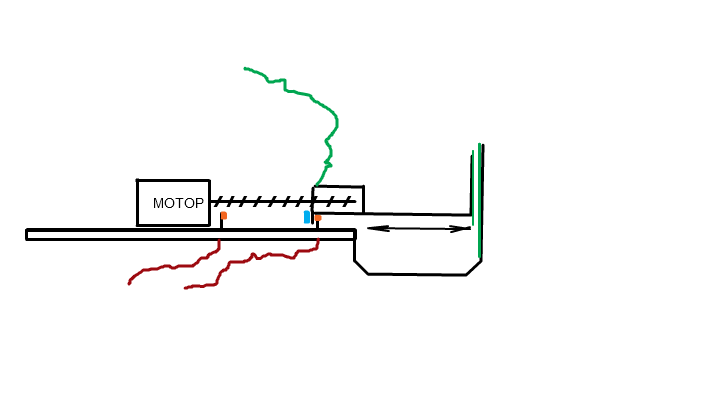
Моя идея,
смысл довольно прост. По червяку ездит один подвижный захват(как у человека челюсть работает). На захвате есть контактный датчик, который контроллирует отключение
захвата, чтобы избежать перегрузку мотора. Нужно еще добавить датчик на саму подушку, это может быть простая кнопка, которая активируется при достаточном нажатии.
Жду комментов, и других мыслей.Добавлено (04.11.2011, 16:57)
---------------------------------------------
Есть одна запарка-где найти мотор с червяком ? Я знаю что такие стоят в устройствах считывания, например СД-дисководах, и тп. Но, я точно не помню, там стоит шаговой движок вроде. На этот счет есть идея, -вынять ось с червяком из шагового двигателя, и вставить ее в другой коллекторный мотор.
|
|
|
|
|
|
Модераторы
174 сообщений
Мужчина
|
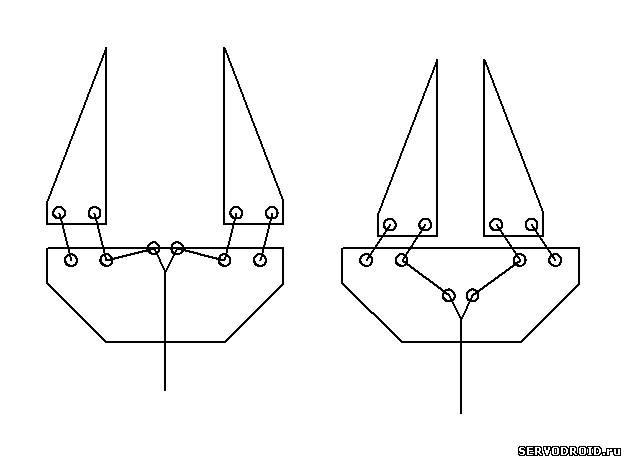
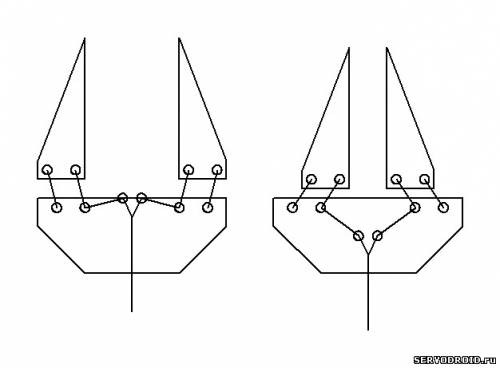
Кинематика. Не мучайтесь и возьмите серву, болт на вал двигателя еще прикошачить надо умудриться...
1426950.jpg
(28.1 Kb)
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Quote (Dimsan) болт чем не устраивает??
Quote (Aleks_Crow) болт на вал двигателя еще прикошачить надо
+1
Кинематика... Да куча готовых реений, но захотелось изобрести велосипед )) Мне нравится твоя идея, она более практичная да и видел я такие модели в ботах готовых, продающихся
Но серву мы исключим наверное, мы не ищем легких путей 
|
|
|
|
|
|
БЛОГГЕР
340 сообщений
Мужчина
|
Добрый день форумчане!
Quote (S-T-A-L-K-E-R(А)) Но серву мы исключим наверное, мы не ищем легких путей
Полностью поддерживаю!
От идеи уважаемого S-T-A-L-K-E-R(А) вынужден отказаться, средства у меня не те... Имею след:
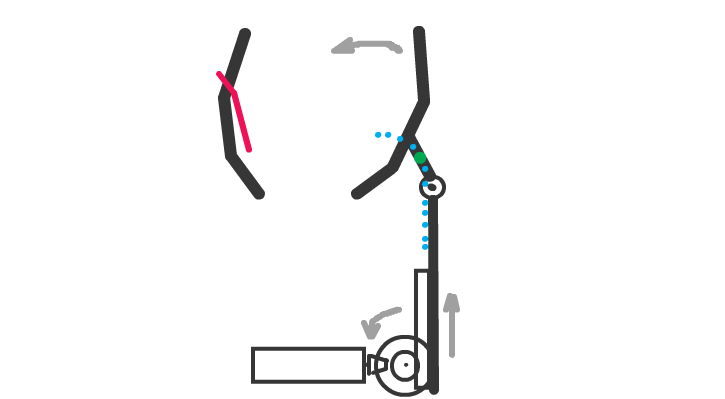
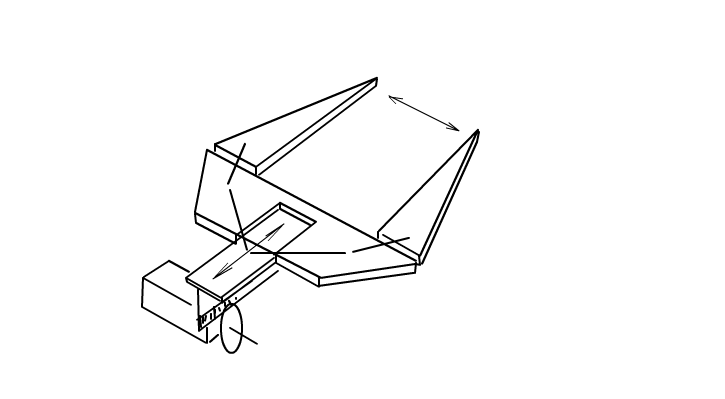
И вот что планирую сделать:
Одна сторона клешни стачична. Мотор и зубчатая рейка с фотографии. Зелёная точка - кулачок кот будет двигатся по направляющей (синий пунктир). Красная полоса - ус от микровыключателя.
На вопрос: "Но такой конструкцие ни чего не поднять!" Отвечу: Мне и не надо, клешне достаточно будет обхватить объект в свои тёплые объятия, сам объект будет волочится волоком по полу 
8635471.jpg
(107.1 Kb)
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Pe40rA,
По моему не то у тебя нарисовано. Тебе нужно использовать вариант как Алексей предлагал, где активные обе части клешни, управляющиеся одним рычагом.
И придумать как осталось закрепить мотор.
|
|
|
|
|
|
Участник
2 сообщений
Мужчина
|
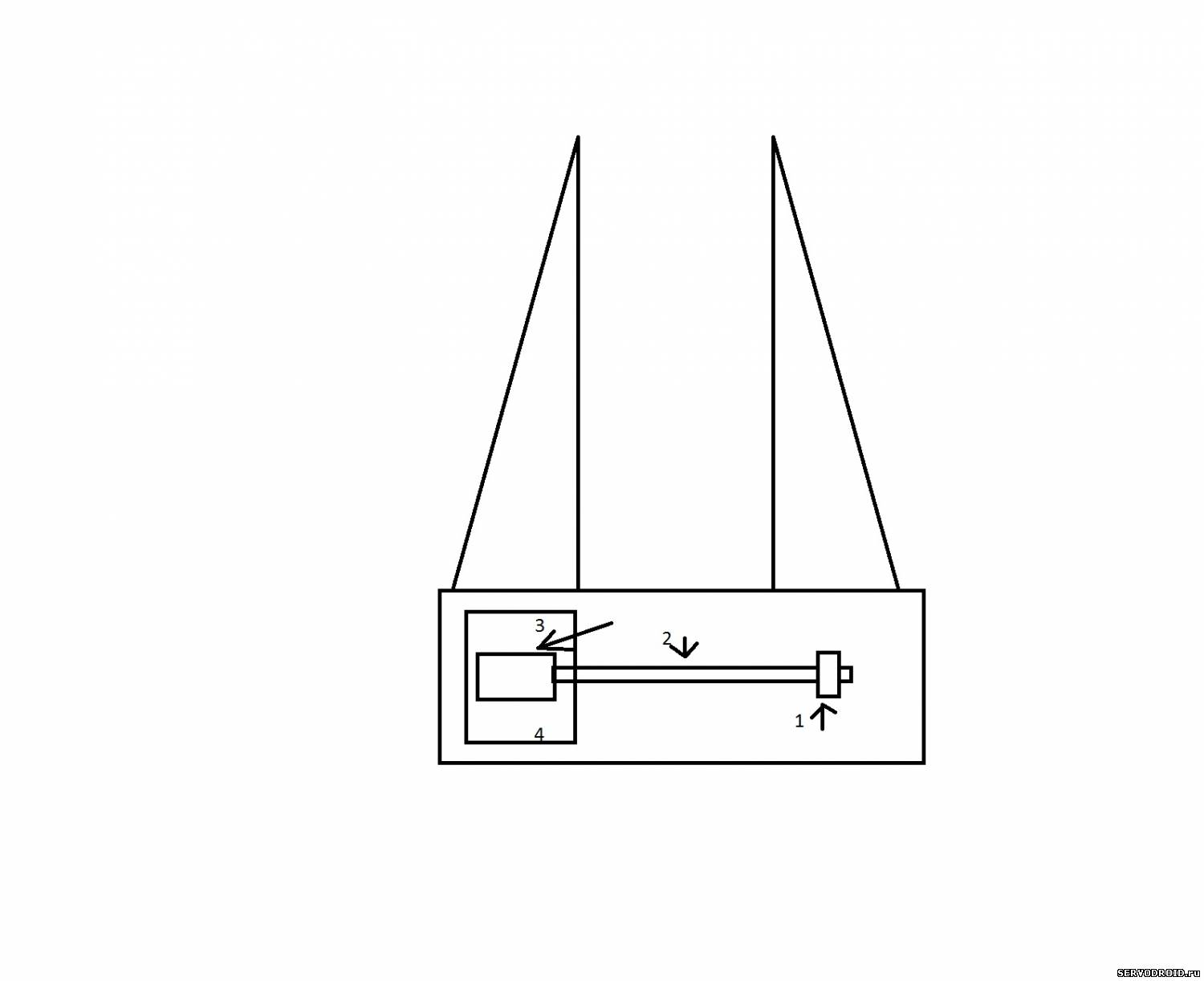
А что если мотор будет тоже двигаться и тянуть одну из клешней.
1. Крепление правой клешни.
2. Червячный вал.
3. Мотор.
4. Платформа для мотора она же крепление левой клешни.
Извиняюсь но чертежи делать увы не умею.
5580401.jpg
(51.3 Kb)
Кто не рискует, тот не пьёт шомпанское! А кто рискует..., рискует его больше ни когда не испить.
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Lis-sp,
по принципу гаечного ключа ? Или как он там называется...
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Можно и такой вариант, но, еще нужны тут две направляющие как минимум, иначе, при захвате груза, ось мотора под нагрузкой искривится.
|
|
|
|
|
|
Модераторы
211 сообщений
Мужчина
|
Предлагаю захват сделать без механики по полиморфной технологии. Идея такова. Берём мешочек с гранулами из пластика и металлических опилок-это и будет захват. Если этот мешочек накинуть сверху на предмет который нам нужно взять, он его обволакивает и гранулы внутри расходятся. Мешочек частично принимает форму контура объекта. Включаем электромагнит внутри мешка и гранулы сдвигаемые металлическими опилками сходятся. Объект захвачен! Дальше объект поднимаем или переносим, в общем делаем то, что требуется. Такой полиморфный захват может брать и переносить предметы, любой формы.
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
 В сбореке проблемо наверно ) В сбореке проблемо наверно )
|
|
|
|
|
|
Модераторы
174 сообщений
Мужчина
|
Droid, видел такой, только внутри был кофе, а вместо магнитного поля - вакуум
|
|
|
|
|
|
Начальная группа
2 сообщений
Мужчина
|
|
|
|
|
|
|
Участник
78 сообщений
Женщина
|
с помощью шестерёнок!мотор (крутится вправо например) одну шестерёнку крутит (влево) а тадругую(влево) и к каждой шестерёнке клешню приклеить.Добавлено (02.11.2012, 19:28)
---------------------------------------------
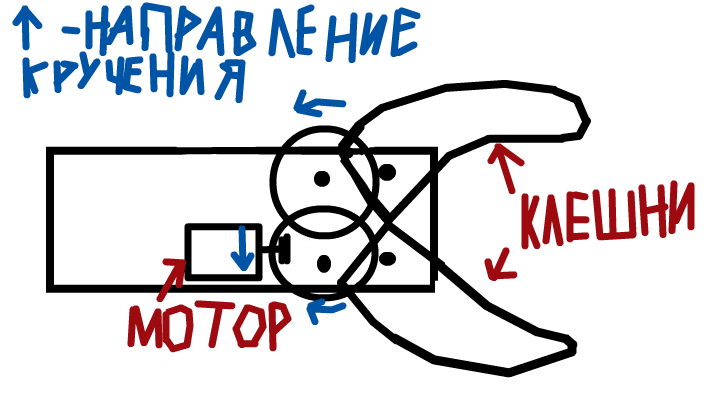
вот так. Добавлено (02.11.2012, 19:31)
---------------------------------------------
клешни приклеены к шестерням.мотор крути шестерню она другую и воаля
|
|
|
|
|
|