Подписывайся на наш Телеграм канал, задавай вопросы по роботам, делись своими схемами,
помогай другим собирать роботов и набирайся опыта!
t.me/servodroid
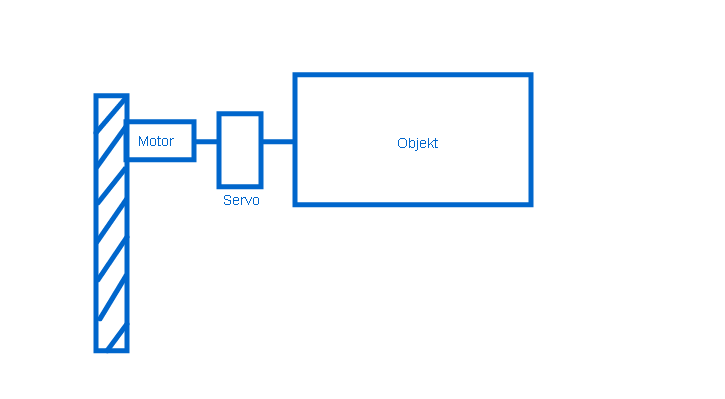
Хочу сделать на ОСУ башню, на сервах, которая будет удерживать свое положение при движении по неровной поверхности. Как это сделать ? Какие нужны электронные устройства ?
Гироскоп + цифровая адаптивная САУ с ОС по отклонению, возможно еще и акселерометр понадобится, хотя это вряд-ли. По поводу адоптивной САУ с ОС по отклонению делал лабы какие то, есть где то материалы
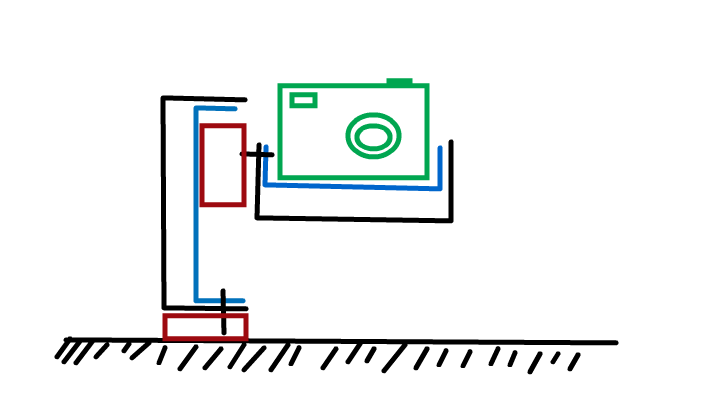
Вот, держи кое-какие материалы (ЛС - не имею право выкладывать в общий доступ. Для всех остальных - ищите информацию по теме адаптивного трансверсального фильтра). Кратко, в отчете есть график, самый первый - это работа фильтра, что по нему могу сказать: зеленая кривая - задающая, в твоем примере - то положение башни, к которому она должна стремиться. Красная кривая - выходная величина (реальное положение башни, в котором она находится). Синяя - входные сигналы (кочки и все прочее). Я не знаю, как это будет работать с константами, а не с синусоидальными сигналами, но при нужном подборе коэффициентов думаю работать будет. Как видно по графику, в начале фильтр подстраивается к типу помех и возмущений постепенно их исключая, в середине моделирования возмущения резко сменились, что на какое то время вновь внесло ошибки в выходную величину, но вскоре фильтр снова настроился. Такой фильтр Гудкова - мой преподаватель и автор лабораторной этой - если не ошибаюсь, применяет в САУ вертолетом (модель) для стабилизации и вроде какие то результаты есть, хотя лично не видел. В МК должен реализоваться, алгоритм несложный. Моделирование же проводилось в MatLab.
Мое предположение: алгоритм не отработает одиночную кочку, ямку, но съезд с асфальтовой ровной дороги на гравийку, тряска - задача именно для него, он как раз любит однообразные постоянные помехи, а не единичные редкие скачки.
И еще, думаю такой фильтр надо будет реализовывать по каждой из трех осей гироскопа.
Четырех серв будет достаточно полагаю для контроля и корректировки отклонений вовсе стороны платформы. Наверно модель пирамиды самая удачная ? А этого "акселиромотра" хватит на это все ? =) Я с ними не разу не работал, поэтому не знаю что да как там у них. Только поверхностно...
Вообще по идее должно хватить трех серв - вращение вокруг трех основных осей, все остальное - излишне. Из датчиков мне кажется нужен только гироскоп, но я не уверен..
alex-avr2: "Yes, ordinary servos can not give such smoothness. " "Обыкновенные сервоприводы не могут обеспечить такую плавность перемещений." - поэтому тут шаговый двигатель применён.