22:26 БИБОТ-1 | ||||||
 БИБОТ-1 - это простой двухфункциональный робот. Приставка "би" -означает два, двойной. Робот способен бежать за источником света или двигаться по линии. В конструкции предусмотрена независимая регулировка скорости вращения моторов, простое "переключение" из одного режима в другой, включение-выключение питания В описанных режимах работы изменения прямого или отражённого излучения приводят к пропорциональному изменению тока через моторы. Это позволяет добиться достаточно точной реакции на источник света. ***
1.ВИДЕОТЕСТЫ.
Через панель навигации видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель навигации доступна после запуска видео, справа внизу значок пиктограммы. Перед запуском каждого видеофрагмента автоматически выводится его название в верхнем левом углу. В нижней части окна проигрывателя слева название плейлиста и количество сгруппированных видеофрагментов.
Видеофрагменты 1-6 ВСЕ РОБОТЫ на канале SERVODROID! Подпишись и смотри. Переход по ссылке жми!
нажимайте фото для просмотра в полном размере
КОНСТРУКЦИЯ. Робот выполнен по гибридной модульной технологии. Корпус выполнен из бумаги (картона) на распечатанном шаблоне. Модуль с радиокомпонентами из стеклотекстолита закреплён на корпусе. Дополнительные компоненты также смонтированы непосредственно на корпусе. Для усиления конструкции в наиболее нагруженных частях установлены рёбра жёсткости.
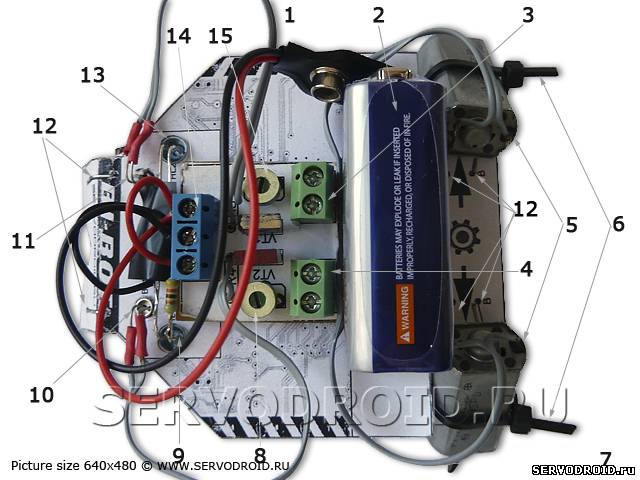
МОТОРЫ. Оба мотора расположены под углом относительно поверхности печатной платы. Моторы крепятся на усиленной ребрами жёсткости поверхности крыльев. В конструкции робота осуществляется прямая передача момента вращения с вала мотора на поверхность передвижения. Для увеличения коэффициента с поверхностью на валы моторов надеты протекторы (резиновые ролики). ИСТОЧНИК ПИТАНИЯ. Источник питания батарея типоразмера 6F22 напряжением 9 вольт. Батарея расположена вертикально рядом с моторами и закреплена двусторонним скотчем. Простой и лёгкий доступ позволяет осуществить быструю замену. ВЫКЛЮЧАТЕЛЬ ПИТАНИЯ. В качестве выключателя питания используется клипса-разъём, которую поворачивают для включения или выключения относительно одной из клемм батарейки. Такое решение продиктовано использованием как можно меньшего количества дополнительных компонентов и соответственно меньшего кол-ва соединений (проводов) в схеме.
РЕГУЛИРОВКИ СКОРОСТИ И ЧУВСТВИТЕЛЬНОСТИ К СВЕТУ. В схеме предусмотрено независимая установка скорости вращения моторов и чувствительности к свету. Для этого на печатной плате размещены два подстроечных резистора. Вращая их можно выставить скорость передвижения по трассе или чувствительность при движении за источником света. Пр настройки необходимо помнить, что усиление чувствительности к свету приведёт к увеличению скорости и наоборот.
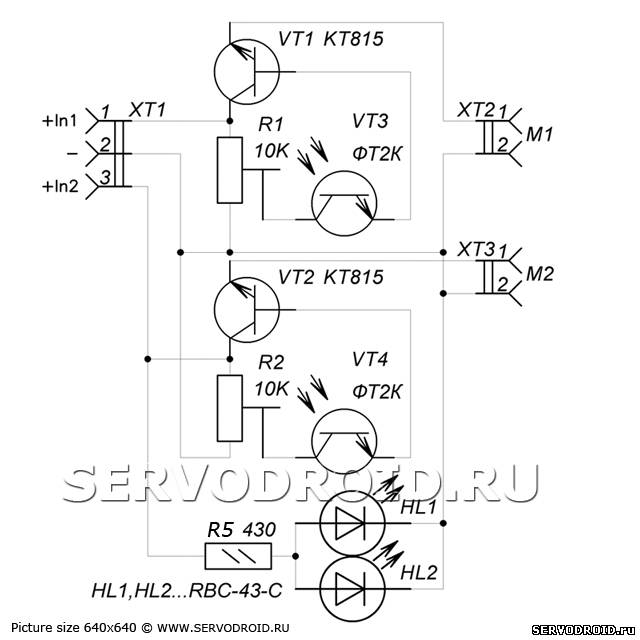
3.ПРИНЦИП РАБОТЫ. Электрическая схема робота представлена на рис.1. Электрическая схема содержит два идентичных независимых токовых регулятора с управлением от фототранзистора. Входы +in1 и +in2 соединяют внешней перемычкой. Принцип работы схемы изложен далее.
Печатная плата изготовлена из односторонне фольгированного листа стеклотекстолита толщиной 1-1,5мм. Размеры печатной платы 30х30мм. Список радиокомпонентов приведён в таблице.1. Ссылка на архив с чертежами и разводкой под ЛУТ размещена в конце статьи! Всё чертежи в архиве в точных размерах. Не редактировать, не масштабировать!
Табл.1.Список радиокомпонентов.  ВНИМАНИЕ! Резисторы R3,R4 напаивать! Для правильной и успешной сборки придерживайтесь указанных инструкций по сборке. Электрическая часть робота выполнена на основе схемы двухканального регулятора мотора доступного по ссылке здесь. В схему внесены изменения для управления регулятором от фототранзистора. Но изменения не касаются чертежа печатной платы, которая остаётся в точности такой же как и была. Все изменения осуществляются путём подключения внешних дополнительных радиокомпонентов через разъёмы. Чертёж печатной платы доступен в архиве в конце статьи.
Скачайте архив размещённый в конце статьи. Используйте термоклише для изготовления печатной платы методом ЛУТ. Предварительно зачистите фольгированную поверхность стеклотекстолита, промойте и высушите. Выполняйте перевод по известной методике ЛУТ, рисунка токоведущих дорожек. Проведите травление в растворе. После изготовления печатной платы проведите проверку токоведущих дорожек мультиметром на предмет коротких замыканий.
Из архива распечатайте сборочный (монтажный) чертёж на офисном (обычном) листе формата А4. Вырежьте монтажный чертёж по контуру и приклейте к поверхности изготовленной печатной платы. Обратите внимание, на то, что отверстия на чертеже должны быть точно совмещены с отверстиями на печатной плате (фото.4).
Выполните монтаж радиокомпонентов с помощью таблицы 1. Резисторы R3,R4 паять не нужно! К отверстиям позиций резисторов R3,R4 через монтажные проводки (длиной до 10см) паяйте фототранзисторы VT3,VT4. Позиции резисторов R3,R4 помечены буквами "к" и "э" для правильной установки выводов коллектора и эмиттера фототранзисторов (фото.4). Двойной провод для подключения фототранзисторов можно взять от любого компьютерного соединительного шлейфа. Соедините монтажным проводом крайние секции трёхсекционного клеммника XT1, это входы in1 и in2 (фото.5, красный провод).
Придайте выводам фототранзистора сгиб под прямым углом (фото.6), укоротите выводы. Паяйте выводы фототранзистора с свободным концам двойного монтажного провода. Для изоляции мест пайки используйте термоусадочную трубку или кембрики (ПВХ-трубка) или изоляционную ленту. Термоусадочная трубка удобнее тем, что после прогревания охватывает и надёжно фиксирует место пайки. После выполненного монтажа фототранзисторы должны быть подключены как на фото.7.
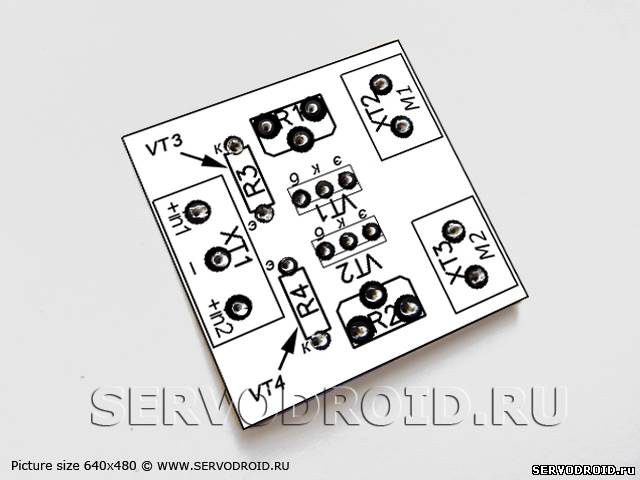 фото.4
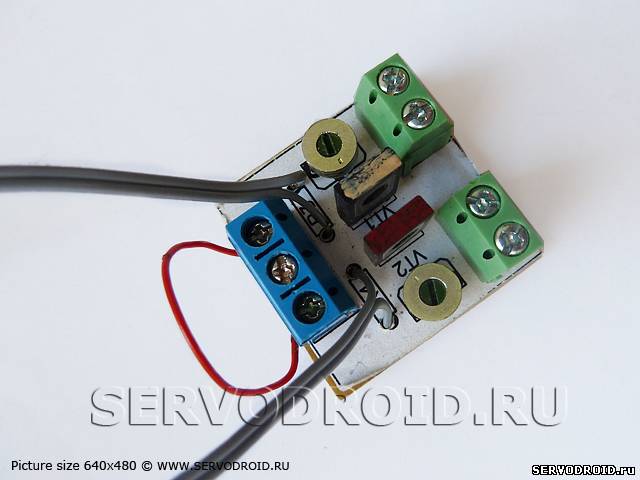 фото.5
 фото.6
 фото.7
Из архива извлеките чертёж корпуса. Распечатайте его на белом офисном листе формата А4. Подготовьте лист тонкого гофрокартона. На фото.8 в левом верхнем углу показан гофрокартон с торца. Гофрокартон состоит из трёх слоёв: A, C-поверхностные слои, B-промежуточный гофрированный слой.
Наклейте чертёж корпуса на тонкий гофрокартон (фото.8). Вырезайте корпус по периметру. Выполните разрезы указанные на чертеже пиктограммой "ножницы" по жирным линиям. Выполните сгибы по указанным на чертеже пунктирным линиям и маркируемым чёрными стрелками на фото.9. Воспользуйтесь степлером для установки скоб на указанные позиции впереди и сзади (фото.10). На чертеже корпуса позиции установки скоб помечены чёрными линиями с кружками на концах. На фото.10 на позиции установки скоб указывают белые стрелки. Скобы выполняют функцию ребер жёсткости с местах наибольшей нагрузки. После установки скоб выполните их сгиб на линиях сгиба (фото.11). Для ровного сгиба скоб воспользуйтесь инструментом.
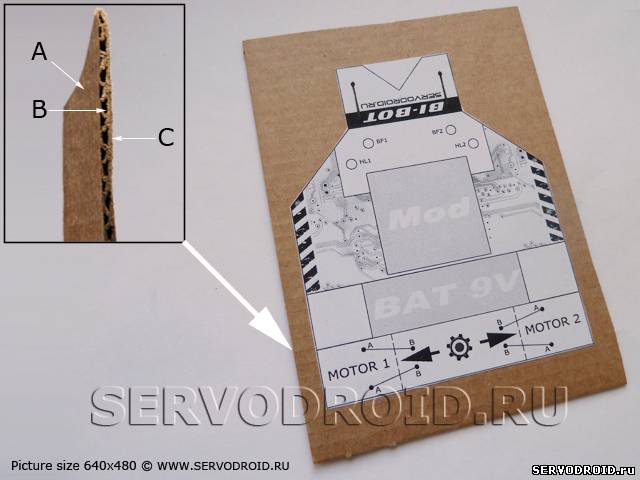
фото.8
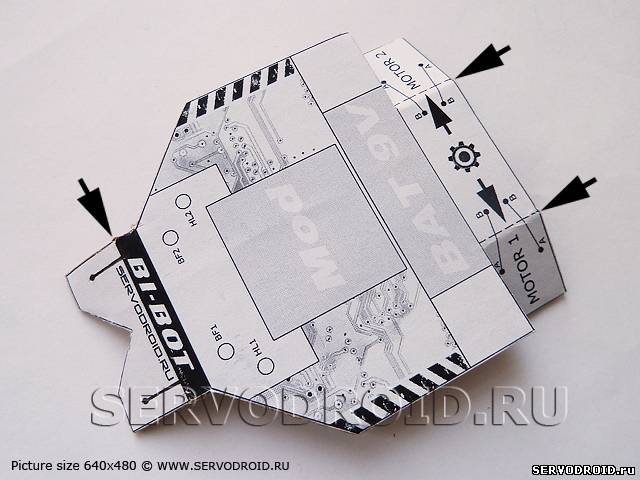 фото.9
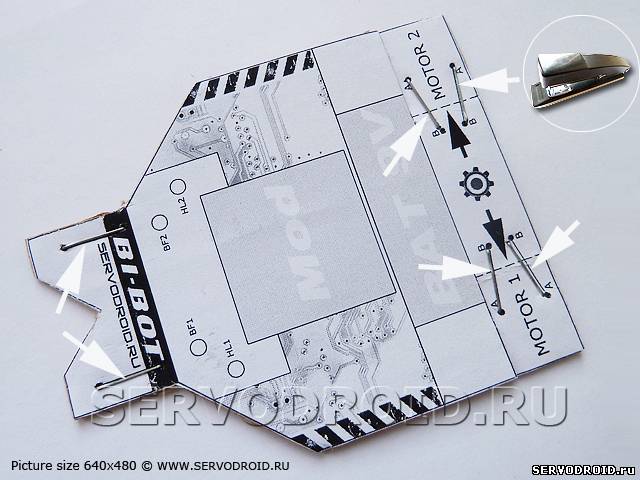
фото.10
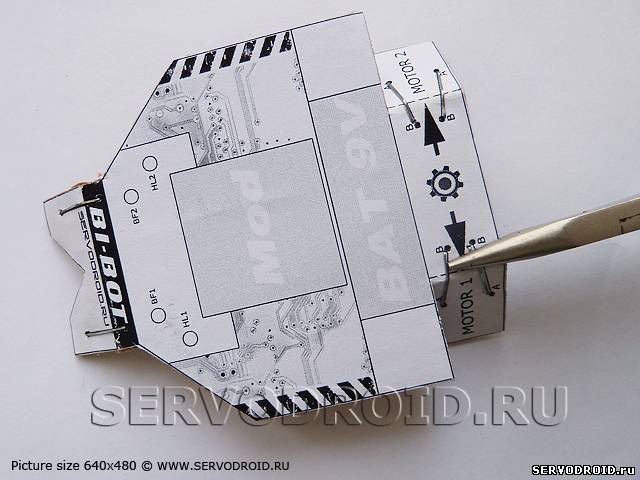 фото.11
На позициях BF1,BF2 проделайте отверстия под размер корпуса фототранзисторов. На позициях HL1,HL2 проделайте отверстия под размер корпуса инфракрасных светодиодов (фото.12). С противоположной стороны в области отверстий прикрепите полоску изоляционной ленты (фото.13).
На позиции "Mod" и "BAT 9V", а также позиции для установки моторов "MOTOR 1", "MOTOR 2" приклейте полоски двустороннего скотча (фото.12 помечены белыми стрелками). Чтобы передняя опорная часть корпуса скользила её необходимо обернуть скотчем. Возьмите моток прозрачного одностороннего скотча и помести те его так как показано на фото.14. Затем подверните, обклеив с двух сторон и обрежьте всё лишнее (фото.15).
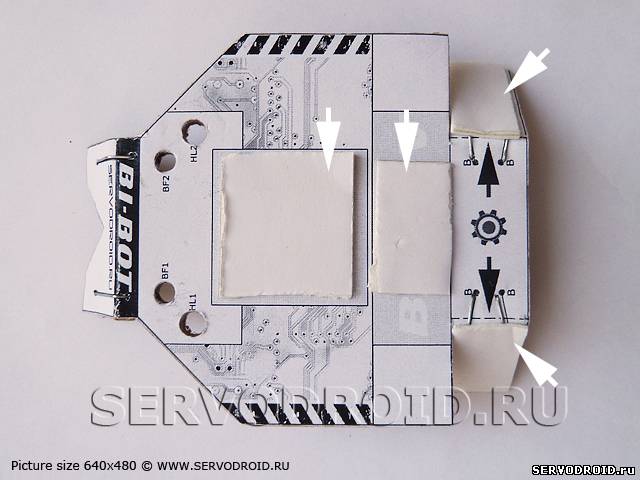 фото.12
 фото.13
 фото.14
 фото.15
Результат обёртывания передней опоры в скотч должен быть таким как на фото.16. Передняя поверхность после этого станет достаточной для скольжения во время движения по поверхности. Белыми стрелками помечена скотч-обёртка.
 фото.16
Чтобы обеспечить сцепление вала мотора с поверхностью во время движения робота, используйте протектор. Для этого приобретите два гелиевых стержня. Снимите с гелиевого стержня закрывающий резиновый колпачок. Оденьте колпачки на на валы обоих моторов (фото.17).
Установите моторы на позиции и закрепите с помощью нейлоновых стяжек ( фото.18. помечены белыми стрелками). Подпаяйте к выводам моторов двойные монтажные провода. сдвоенные проводки можно взять от ненужного компьютерного шлейфа.
 фото.17
 фото.18
Перед установкой светодиодов инфракрасного спектра свечения определите их выводы. Для импортных светодиодов: анод (+) -это длинный вывод светодиода, катод(-) -короткий вывод светодиода. Установите инфракрасные светодиоды на позиции HL1, HL2 ориентируя выводами как на фото.19. Выгните выводы светодиодов навстречу друг другу, соединяя их параллельно, катод к катоду, анод к аноду и запаяйте (фото.20).
К соединению выводов катодов (-) светодиодов припаяйте черный монтажный провод (фото.21). К соединению выводов анодов (+) светодиодов припаяйте резистор сопротивлением 430 Ом (фото.21).
Свободный конец черного провода подключите к центральной секции клеммника трёхсекционного (фото.22, синие стрелки). Свободный вывод резистора 430 Ом подключите к крайней секции клеммника трёхсекционнного (фото.22, красные стрелки).
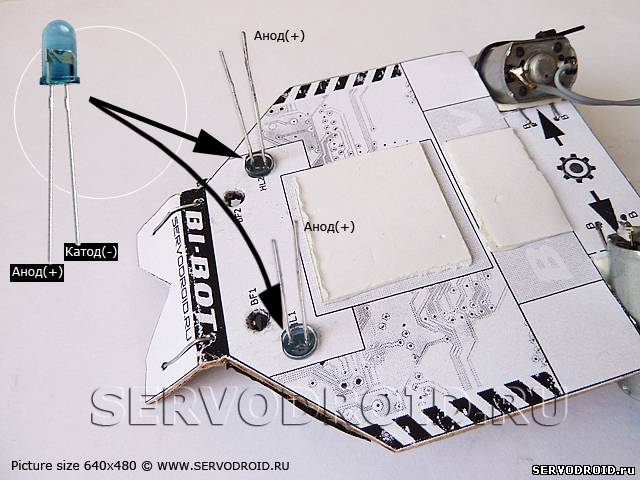 фото.19
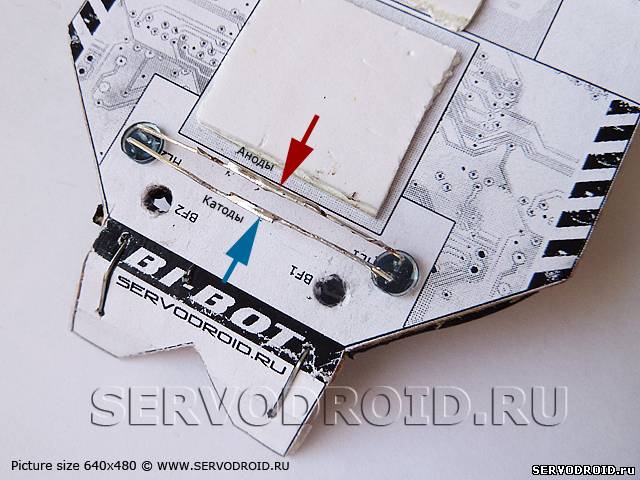 фото.20
 фото.21
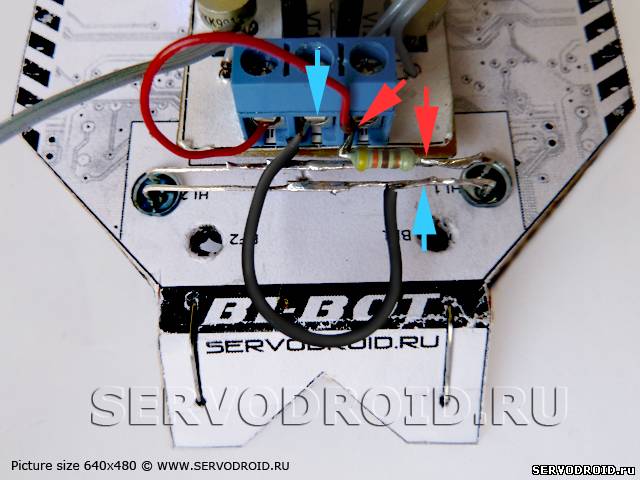 фото.22
6.Установка фототранзисторов подключение клипсы-разъёма.
Проведите изоляцию оголённых выводов светодиодов (фото.24, зелёная стрелка). Подключите клипсу-разъём к контактам клеммника трёхсекционного (фото.24, белая стрелка). Красный провод клипсы-разъёма необходимо подключить к крайней секции клеммника, а чёрный к центральной секции клеммника (фото.24).
Для передвижения по линии установите фототранзисторы на позиции BF1,BF2 (фото.23, фото.24, фото.25). Для повышения чувствительности фототранзисторы следует немного наклонить в сторону светодиодов. Для движения за источником света установите фототранзисторы с тыльной стороны (снизу) (фото.26). Обратите внимание, фототранзисторы должны быть установлены перекрёстно. Для фиксации фототранзисторов предварительно на позиции прикрепите двусторонний скотч (фото.26). 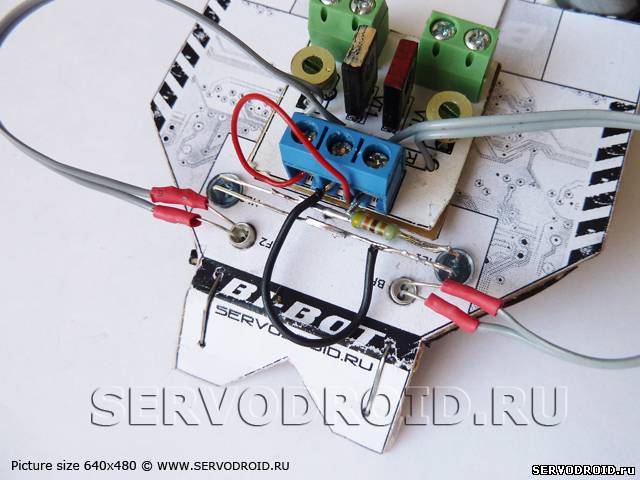 фото.23
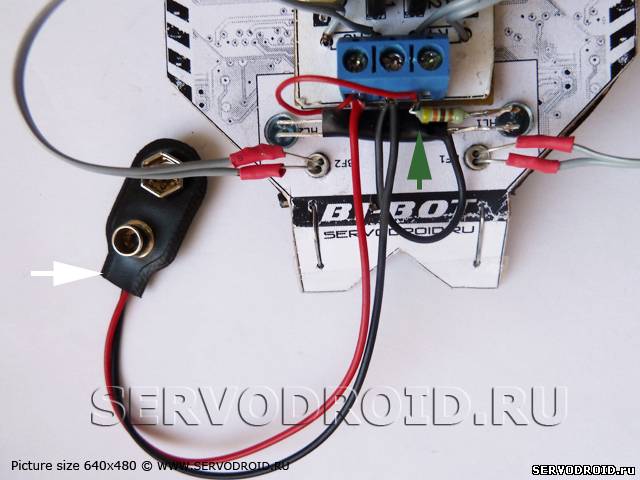 фото.24
 фото.25
 фото.26
7.Подключение моторов, установка источника питания. Подключите моторы двужильным монтажным проводом через клеммники. Каждый из моторов необходимо подключить к расположенному рядом клемнику (фото.27, белые стрелки). Установите батарею 9в на позицию с липким скотчем и немного прижмите для фиксации (фото.28). 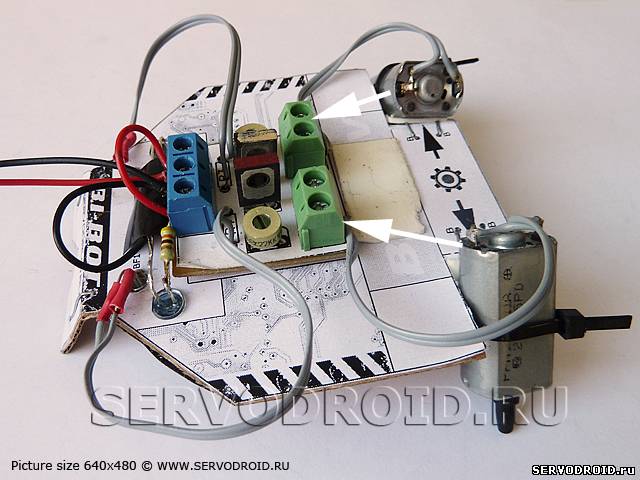 фото.27
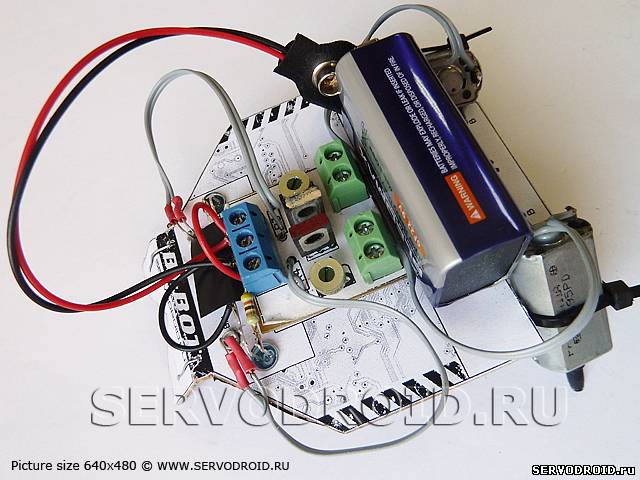 фото.28
8.Настройка.
Настройка заключается в установке с помощью подстроечных резисторов R1,R2 оптимальной скорости передвижения и чувствительности к отражённому свету. Проводите настройку для движения по линии на распечатанных трассах из архива. При правильно выполненном монтаже радиокомпонентов и "свежем" источнике питания настройка не потребует много времени. Сборка окончена! 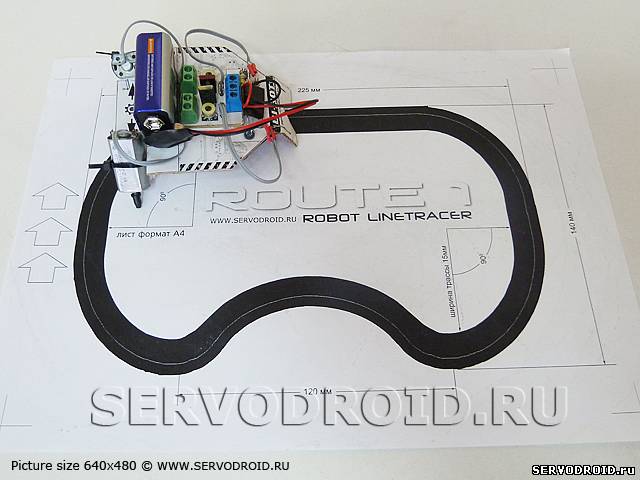
фото.29
Архив к статье "Бибот" пароль не требуется. Все чертежи в точных размерах. Не изменять, не редактировать! Размер архива 1,20Mb Скачать архив
автор Алексей Высоковольтный www.servodroid.ru © Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
| ||||||
|
| ||||||


| Всего комментариев: 23 | |




Ответ: Здравствуйте. В наших статьях индекс после конкретной детали у транзисторов можно опускать. Подойдет любой индекс. Так что считайте, что это не принципиально.
| |


 Кстати чувствительность к свету высокая вне зависимости от фонаря, так как в схеме установлены транзисторы Дарлингтона с большим коэффициентом усиления по току!
Кстати чувствительность к свету высокая вне зависимости от фонаря, так как в схеме установлены транзисторы Дарлингтона с большим коэффициентом усиления по току!


