16:57 ДИХОТОМИЧЕСКИЙ РОБОТ | ||||||||||||||||
 ДИХОТОМИЧЕСКИЙ РОБОТ- робот специально разработан для прохождения трассы. Для определения положения трассы на роботе установлен всего один фототранзистор. Трасса регистрируется путём её пересечения, поэтому робот передвигается по траектории напоминающей зигзаги. Дихотомическим робот называется потому, что работает по простейшему алгоритму обработки сигнала: " 1"="" и="" "0".="" С="" дихотомическим="" роботом="" можно="" проводить="" соревнования="" на="" скорость="" прохождения="" выбранной="" трассы.="" В="" отличии="" от="" дихотомического="" робота="" из="" бумаги="" приведённый="" в="" этой="" статье="" робот="" имеет="" более="" сложную="" схему,="" оснащён="" регулировками="" скорости="" передвижения="" яркости="" свечения="" ик-светодиода.="" помощью="" настроек="" нетрудно="" добиться="" почти="" идеального="" удержания="" трассы="" максимальной="" передвижения.="" Так="" соревнованиях="" по="" linetracer="" занял="" первое="" место="" пробежав="" трассу="" всего="" за="" 12="" секунд.="" Алгоритм="" позволяет="" роботу="" проходить="" не="" только="" трассы,="" но="" простые="" напечатанные="" лабиринты.="" Вместе="" с="" пакетом="" инструкций="" сборке="" дополнительно="" архиве:="" трасса="" для="" соревнований,="" тестовая="" чертежи="" сборки="" лабиринта."="">
*** 1.ВИДЕОТЕСТЫ РОБОТА. Через панель навигации видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель навигации доступна после запуска видео, справа внизу значок пиктограммы. Перед запуском каждого видеофрагмента автоматически выводится его название в верхнем левом углу. В нижней части окна проигрывателя слева название плейлиста и количество сгруппированных видеофрагментов. На видео.1
дихотомический робот проходит на повышенной скорости
сборную трассу на 16 листах. На видео.2 дихотомический робот проходит на малой скорости напечатанный лабиринт. На видео.3 дихотомический робот движется по тестовой трассе выполненной на одном листе формата A4 на средней скорости. На видео.4. робот проходит трассу для offline-соревнований за 12 секунд. Видеофрагменты 1-4 ВСЕ РОБОТЫ на канале DROID1020 !!! подпишись и смотри. Переход по ссылке жми! ALL ROBOTS on the DROID1020 channel! ! ! be signed and look. Transition according to the link 2.ХАРАКТЕРИСТИКИ И ФУНКЦИОНАЛЬНОСТЬ. На фото.1 и фото.2 показан дихотомический робот в сборке. нажимайте фото для просмотра в полном размере
ФОТОДАТЧИК. В качестве фотоэлемента определяющего положения линии установлен фототранзистор. Фототранзистор получает информацию о положении линии по отражённому инфракрасному излучению. Поэтому в конструкции робота предусмотрена регулировка интенсивности излучения подсветки трассы. Эта регулировка позволяет подстроить чувствительность фотоэлемента робота к лини трассы. РЕГУЛИРОВКА СКОРОСТИ. Установить оптимальную скорость передвижения по линии можно с помощью подстроечного резистора. Скорость передвижения регулируется в широком диапазоне от минимальной (несколько оборотов) до максимальной. Для оптимальной настройки скорости на печатной плате установлен подстроечный резистор. Плавное изменение скорости обеспечивается схемой шим-регулятора, когда на мотор поступают импульсы тока с установленной подстроечным резистором длительностью. ИНДИКАЦИЯ. Расположенные в передней части робота индикаторные светодиоды позволяют визуально контролировать реакцию робота на линию и проводить его настройку. ИСТОЧНИК ПИТАНИЯ. В качестве источника питания используется алкалиновая
батарейка отечественного или импортного производства напряжением 9 вольт.
Источник питания размещается нестандартно и крепиться вверху на моторах. Ток потребления при напряжении источника питания 9 вольт
(элемент 6F22) в среднем положении подстроечного резистора R3 составляет около
50мА. При максимальной скорости (крайнее положение R3) ток потребления
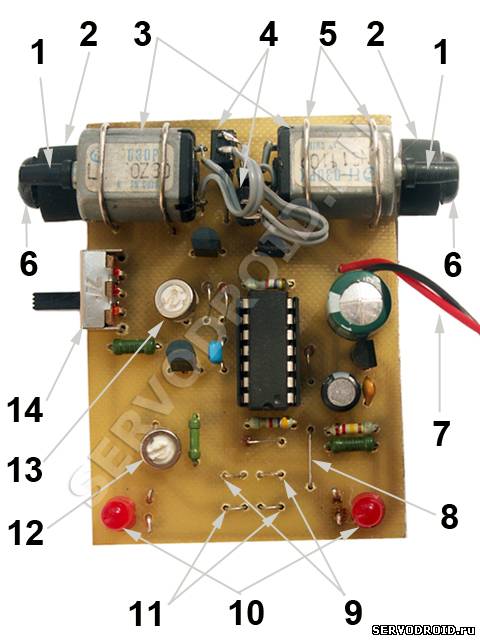
составляет до 100мА. Основные элементы и их функциональное назначение показано на фото.3. Расшифровка позиций даётся ниже.
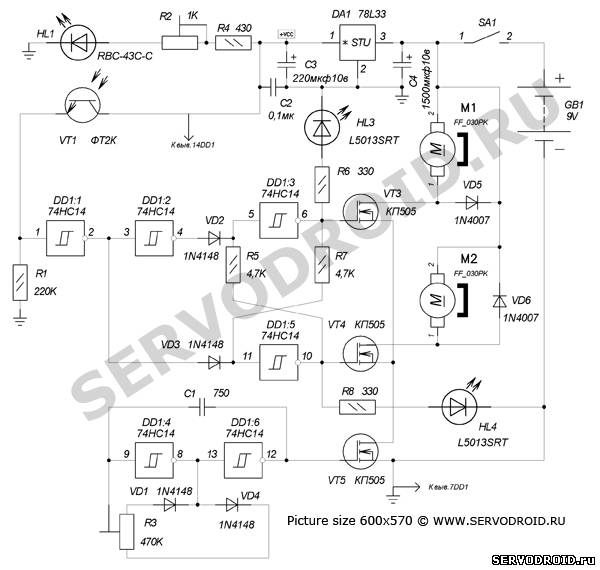
Электрическая схема представлена на рис.1. Схема выполнена на интегральной микросхеме 74HC14, в состав которой входят
шесть элементов-триггеров Шмитта. Микросхема питается от стабилизатора DA1,
напряжением 3,3В. Это же напряжение поступает на ик-светодиоды HL1,HL2 служащие
для подсветки трассы и объектов.
Фототранзистор VT1 и ик-светодиод HL1 расположены под днищем робота, с их помощью робот определяет положение трассы. После включения питания выключателем SA1 на микросхему поступит питание 3,3 вольта, а через светодиод HL1 потечёт ток. Светодиод HL1 будет излучать невидимое инфракрасное излучение. Пока светодиод HL1 находится над светлой поверхностью, ик-излучение отразится и попадёт на рабочую поверхность фототранзистора. Ток фототранзистора VT1 увеличиться, что приведёт к смене на выводе 1 элемента DD1.1 низкого логического уровня на высокий. На выводе 2 этого же элемента установится низкий логический уровень, и диод VD3 окажется запертым. Одновременно высокий логический уровень с вывода 4 элемента DD1.2 пройдёт через диод VD2 и переключит триггер DD1.3,DD1.5 в единичное состояние на выходе 10. Через резистор R8 потечёт ток, и светодиод HL4 зажжётся. Одновременно высокий уровень поступит на затвор полевого транзистора VT4 и откроет его. Мотор М2 управляемый полевым транзистором включиться и робот повернёт к чёрной линии с продвижением вперёд.
4.ДЕТАЛИ И МАТЕРИАЛЫ. Печатная плата изготовлена из
односторонне фольгированного листа стеклотекстолита толщиной 1-1,5мм. Размеры
печатной платы 50х70мм. Ссылка на архив с чертежами и разводкой под ЛУТ
генератора размещена в конце статьи. Список радиокомпонентов приведён в таблице.1. Таблица.1.Список радиокомпонентов.  5.ИНСТРУКЦИЯ ПО СБОРКЕ. Для правильной сборки придерживайтесь инструкций по сборке.
Редактировать, масштабировать чертежи в архиве нельзя, так как все чертежи
архива в точных размерах. 1.Изготовление печатной платы. После изготовления печатной платы
проверьте токоведущие дорожки на возможные замыкания. Затем выполняйте монтаж
всех указанных в таблице 1 радиокомпонентов. Подготовьте односторонний лист
стеклотекстолита размерами 50x70мм. Предварительно зачистите фольгированную поверхность
стеклотекстолита, промойте и высушите. Выполняйте перевод по известной методике
ЛУТ, рисунка токоведущих дорожек. 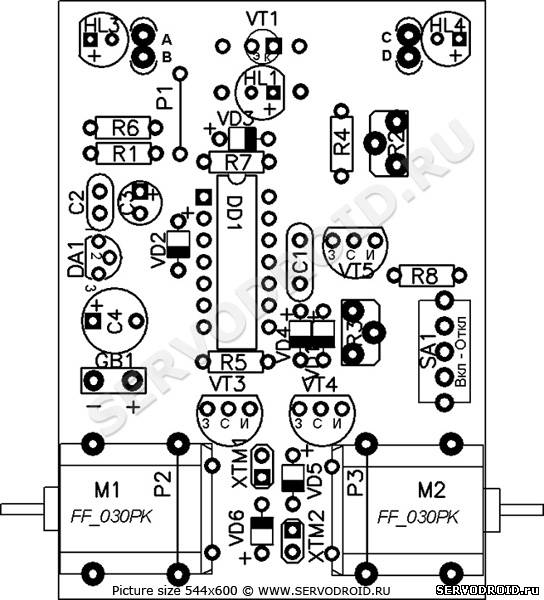 Рис.2.Монтажный чертёж. Нажать фото для увеличения. 2.Монтаж радиокомпонентов. Выполните монтаж всех радиокомпонентов кроме фототранзистора и светодиода инфракрасного свечения. Монтаж рекомендуется проводить в следующем порядке:
резисторы, конденсаторы, транзисторы, диоды, выключатели питания, моторы,
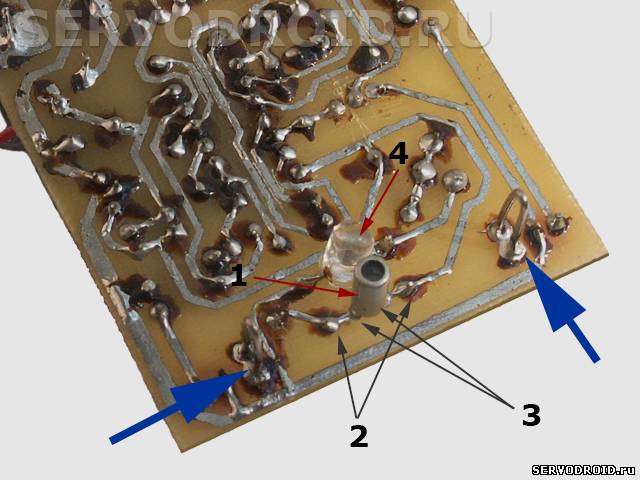
элементы крепежа и фурнитура. Все диоды на печатной плате устанавливают в вертикальном положении. ПЕРЕМЫЧКИ. На монтажном чертеже показаны P1,P2,P3 - это перемычки. В качестве перемычек удобно использовать выводы от ненужных резисторов, конденсаторов. Особенность установки перемычек состоит в следующем. Перемычку P1 устанавливайте сразу. В качестве перемычек P2 и P3 ус пользуются п-образные скобы выгнутые из скрепок. То есть перемычками является крепёжный элемент удерживающий моторы на позициях. Поэтому крепёжные перемычки P2,P3 устанавливайте в конце сборки при установке и крепеже моторов. Об этом будет сказано в отдельном пункте далее. ФОТОТРАНЗИСТОР И СВЕТОДИОД. При монтаже радиокомпонентов обратите внимание на установку фототранзистора ФТ2К (позиция VT1) и инфракрасного светодиода RBC-43C (позиция HL1). На фото.4 показан вид со стороны радиокомпонентов. Цифрами и стрелками на фото.4 показаны основные(2) отверстия и дополнительные(1) отверстия. На фото.5 показан вид со стороны токоведущих дорожек. Обозначения для фото.5 следующие: 1-фототранзистор, 2-инфракрасный светодиод, 3-основные отверстия, 2-дополнительные отверстия. Фототранзистор и светодиод устанавливают со стороны токоведущих дорожек ориентируясь по монтажному чертежу приведённому на рис.2. Начните установку с фототранзистора ФТ2К (позиция VT1), фото.5. Продевайте выводы фототранзистора(1) через основные(3) отверстия на позициях, затем через дополнительные(2) отверстия расположенные рядом. Выводы фототранзистора и светодиода запаивают в дополнительных(2) отверстиях со стороны токоведущих дорожек на контактных площадках. Аналогично устанавливается инфракрасный светодиод на свою позицию. нажимайте фото для просмотра в полном размере
3.Изготовление и монтаж передних опор. В
качестве передних опор используются две половинки от металлической скрепки. Для
этого металлическую скрепку разрезают кусачками пополам и устанавливают половинки
в передней части печатной платы слева и справа (фото.5). Позиции для установки передних
опор обозначены латинскими буквами ABи CD. Высота обоих передних опор не должна превышать 10мм. Затем концы скрепки запаивают, используя нейтральный
беспромывочный флюс для облегчения пайки. После этого робот будет иметь две
опоры в передней части печатной платы. Передние опоры помечены синими стрелками на фото.5 и фото.6. 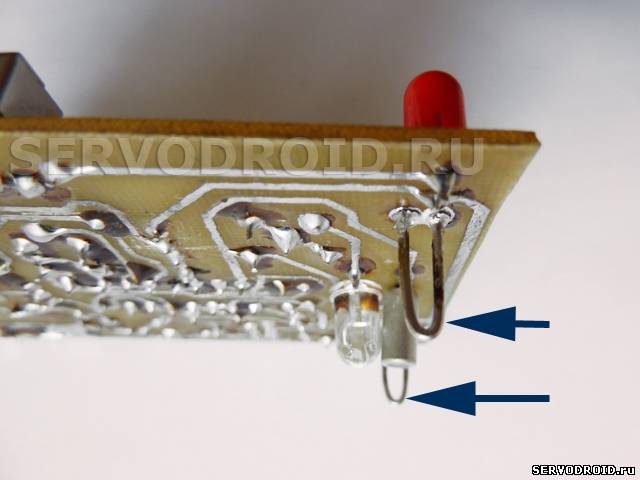 Фото.6.нажать фото для увеличения. 4.Изготовление силовой рамы и монтаж моторов. Для
крепления двигателей к печатной плате используют канцелярские скрепки. Один
мотор фиксируется двумя скрепками. Скрепки предварительно разгибают в пруток, а
затем формируют с помощью монтажных плоскогубцев П-образную скобу. Обратите внимание на крепёжные скобы(3) на фото.7 и фото.8. Они обозначены
на сборочном чертеже (рис.2 вверху) как перемычки P2 и P3. Поэтому их
назначение двоякое: они удерживают моторы и проводят ток. Крепёжные перемычки P2,P3 являются
частью схемы и должны быть надёжно и гарантировано запаяны на позициях. До установки моторов
вырежьте и приклейте на позиции прямоугольники из двухстороннего тонкого
скотча. После закрепления скобами моторы будут зафиксированы на позициях. 5.Подключение моторов.нажимайте фото для просмотра в полном размере
Позиции
для подключения моторов на монтажной схеме (рис.2) показаны как XTM1, XTM2. На
эти позиции запаивают часть секции(две) от панельки для установки микросхем. Для каждой позиции вам потребуется две секции, которые
отрезают бокорезами от панельки. Секции устанавливают и запаивают на печатную
плату каждую на свои позиции. Далее эти секции XT1,XT2 будем называть
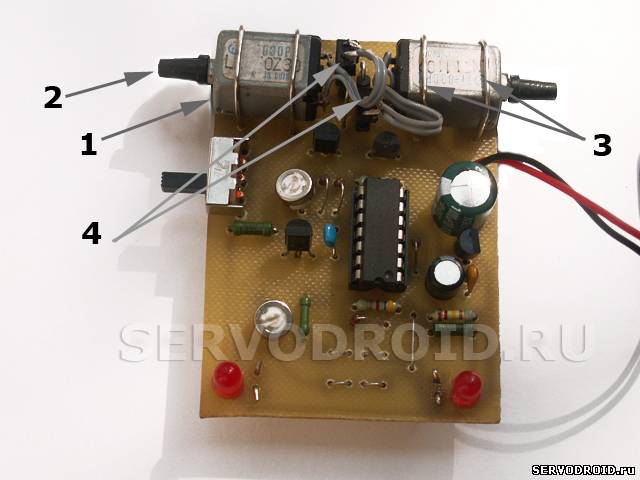
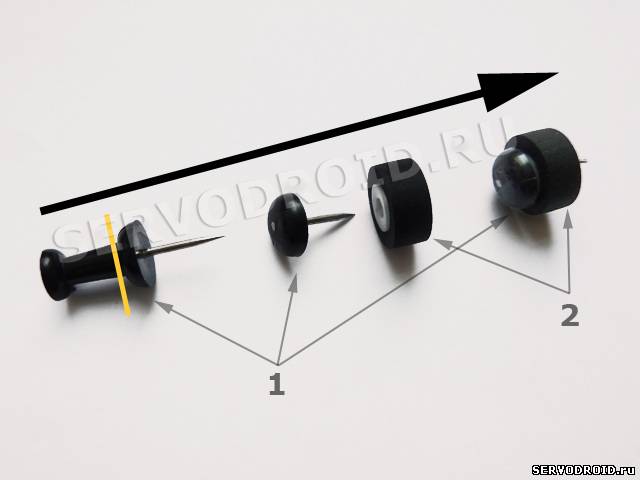
разъёмами. Установленные разъёмы(4) показаны на фото.6. Для соединения с установленными разъёмами возьмите два коротких монтажных провода и подпаяйте к его концам самодельный двухвыводной штекер. Штеккер изготавливается из штыревой линейки однорядной PLS40. Отрезайте бокорезами две секции и подпаивайте к монтажным проводкам. Оставшиеся концы подпаивайте к мотору. Второй мотор подключается также. Зачем нужно подключение двигателей через разъёмы? Соединение через разъём позволяет оперативно изменить полярность подключения любого мотора в случае неправильного начального подключения (когда робот едет назад). Также можно изменить направление движения робота относительно трассы в противоположную сторону, подключением моторов к "чужому” разъёму рядом расположенного мотора. 6.Изготовление и монтаж осевой подвески. Назначение подвески крепёж колеса в заданной позиции. Для сборки осевой подвески вам потребуются: кнопки канцелярские силовые с пластмассовой
ручкой и две канцелярские металлические скрепки. Не нарушайте последовательность сборки так как это важно! Приобретите канцелярские кнопки с пластмассовой ручкой (фото.9). Выберите две кнопки одного цвета. Далее приступайте к изготовлению осевой подвески.
нажимайте фото для просмотра в полном размере
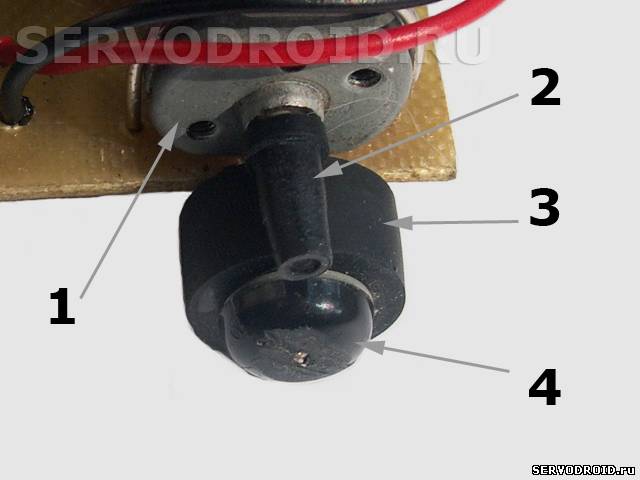
На фото.11. Осевая подвеска после сборки будет состоять из: резинового ролика(3) нанизанного на канцелярскую кнопку(4). После того как осевая подвеска будет собрана, установите подвеску на позицию на печатной плате. Эта позиция находится под валом мотора(1). Оденьте на вал мотора резиновый протектор(2). Припаяйте подвеску небольшим количеством припоя за край со стороны токоведущих дорожек (фото.12). Проверьте ролик на качество хода, вращение. Он должен вращаться свободно и вместе с тем не должен болтаться в диагональных направлениях. Иначе говоря, при вращении ролика не должно быть эффекта "восьмёрки” как у велосипеда. После такой настройки зафиксируйте ролик большим количеством припоя. нажимайте фото для просмотра в полном размере
6. НАСТРОЙКА РОБОТА. Перед запуском робота необходимо провести небольшую настройку. Настройка необходима для того, чтобы добиться наилучшего прохождения трассы роботом. Возможно, после сборки робот функционирует неправильно или вообще не работает. Помочь в решении возникших проблем смогут дальнейшие рекомендации по настройке. 1.ОБЩАЯ
ПРОВЕРКА. После
монтажа всех радиокомпонентов проведите визуальный осмотр участков монтажа со
стороны токоведущих дорожек. Внимательно
осмотрите места пайки.
2.УСТАНОВКА
РЕГУЛИРОВОК. Выставьте
с помощью мелкой отвёртки регулятор скорости на подстроечном резисторе R3 в
среднее положение. Регулятор яркости подсветки на подстроечном резисторе R2 установите
на минимальное значение. Добейтесь, чтобы инфракрасный светодиод светил тускло.
Визуально увидеть свечение инфракрасного светодиода невозможно и чтобы
проверить его воспользуйтесь своим сотовым телефоном или цифровым фотоаппаратом.
В зависимости от направления вращения подвижного контакта подстроечного
резистора R2 (регулировка яркости) можно наблюдать, как изменяется яркость
свечения светодиода. Выставьте минимальную яркость свечения! 3.ТЕСТИРОВАНИЕ. Тестирование
можно начинать при условии завершения общих проверок и выполненных настроек, приведённых
в разделе "установка регулировок”. Тест№1. Положите
на стол белый лист офисной бумаги формата А4. Поставьте на него робота и
включите питание, переведя микровыключатель SA1 в положение "включено”. Должен засветиться
светодиод, расположенный на правой стороне (позиция HL4) и робот начнёт
поворачивать влево (против часовой стрелки). !!!
Если горит правый светодиод и робот
поворачивает назад вправо поменяйте полярность подключения правого мотора на противоположное.
Если светодиод не светится и (или) правый мотор не работает, проверяйте
полярность подключения светодиода (позиция HL4) и ошибки в монтаже транзисторов
(позиции VT4,VT5) или короткие замыкания рядом с этими транзисторами со стороны
токоведущих дорожек. Возможна неправильная установка микросхемы DD1 или не
качественная пайка её контактов, замыкания между соседними контактами. Тест№2. Положите
на стол чёрный лист бумаги или просто поставьте робота на очень тёмную
поверхность. Переведите микровыключатель SA1 в положение "включено”. Должен
засветиться светодиод, расположенный на левой стороне (позиция HL3) и робот
начнёт поворачивать вправо (по часовой стрелке). !!!
Если горит левый светодиод и робот
поворачивает назад влево поменяйте полярность подключения левого мотора на
противоположное. Если светодиод не светится и (или) левый мотор не работает,
проверяйте полярность подключения светодиода (позиция HL3) и ошибки в монтаже
транзисторов (позиции VT3,VT5) или короткие замыкания рядом с этими транзисторами
со стороны токоведущих дорожек. Возможна неправильная установка микросхемы DD1
или не качественная пайка её контактов, замыкания между соседними контактами. Тест№3. Откройте
папку Test с чертежами тестовой трассы и распечатайте трассу. Установите робота
на внешнюю кромку трассы в направлении указанном стрелочками. Включите робота.
Если робот уверенно передвигается по трассе и не сходит с неё, то вы правильно
выполнили все настройки. !!! Если
робот при передвижении по линии часто съезжает с неё, выставьте меньшую
скорость с помощью подстроечного резистора R3. Выберите такую скорость, при
которой робот уверенно движется вдоль линии и не съезжает с неё. Проверьте яркость
свечения инфракрасного светодиода HL1. Если она выше рекомендуемых
установок уменьшите её с помощью
подстроечного резистора R2. Сборка окончена!  Фото.13.нажать фото для увеличения. В архиве: в папке "сборка робота" чертёж термоклише в точных размерах, чертежи трассы для соревнований, чертежи тестовой трассы, чертежи лабиринта, изготовление печатной платы методом ЛУТ. Преобразовывать и редактировать чертежи нельзя! После скачивания
распечатайте чертежи на лазерном принтере. Термоклише распечатайте на глянцевой
бумаге. Используйте термоклише для перевода рисунка на стеклотекстолит по
методу ЛУТ. Архив с чертежами, пароль не требуется. Размер архива 991kb Скачать архив Пароль к архиву mux100Авторство на статью принадлежит ©
[url=http://www.servodroid.ru]SERVODROI.RU -Робототехника для
начинающих своими руками[/url]. Если Вы читаете это сообщение
пожалуйста, [url=http://www.servodroid.ru]сообщите нам[/url]. Пароль к архиву mux100.Авторство на статью принадлежит ©
[url=http://www.servodroid.ru]SERVODROI.RU -Робототехника для
начинающих своими руками[/url]. Если Вы читаете это сообщение
пожалуйста, [url=http://www.servodroid.ru]сообщите нам[/url]. Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим! автор Алексей Высоковольтный www.servodroid.ru © Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено! | ||||||||||||||||
|
| ||||||||||||||||






| Всего комментариев: 18 | |

| |