00:35 LiNE TRACER С ПАМЯТЬЮ |
 LineTracer -это робот бегущий по линии, с ячейкой памяти на триггере. Робот способен быстро и достаточно точно передвигаться по линии. При движении робот постоянно удерживается на линии. Ячейка памяти, запоминает, в какую сторону произошёл съезд. Затем включает соответствующий двигатель и возвращает робота на линию. Элемент памяти позволяет роботу передвигаться по любой трассе даже выполненной в виде отрезка. Робот изготовленный без ошибок и хорошо настроенный будет передвигаться по линии с невероятной устойчивостью. Если столкнуть робота рукой с трассы в ту или иную сторону, он тотчас вернётся обратно! Робот выполнен всего на двух цифровых микросхемах, и не требует программирования. В процессе совершенствования схемы был разработан новый вариант робота описание которого приводиться в этой статье. |
$CUT$
1.ВИДЕОТЕСТЫ.
Через панель навигации видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель навигации доступна после запуска видео, справа внизу значок пиктограммы. Перед запуском каждого видеофрагмента автоматически выводится его название в верхнем левом углу. В нижней части окна проигрывателя слева название плейлиста и количество сгруппированных видеофрагментов.
Видеофрагменты 1-3
ВСЕ РОБОТЫ на канале DROID1020 !!! подпишись и смотри. Переход по ссылке жми!
ALL ROBOTS on the DROID1020 channel! ! ! be signed and look. Transition according to the link
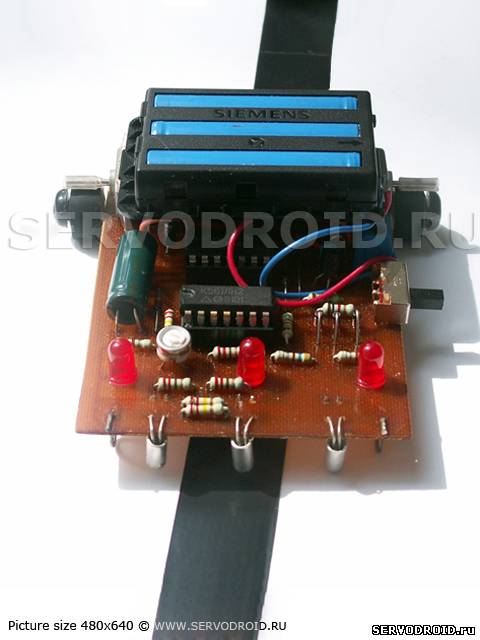
фото.1
|
 фото.2 |
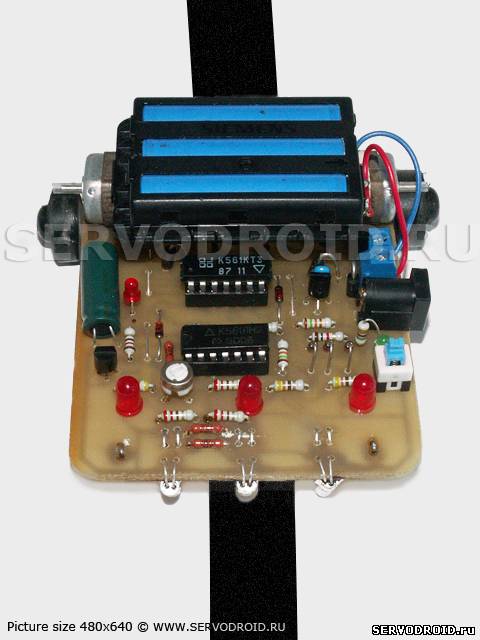
фото.3
|
Диапазон питающих напряжений может лежать в пределах от 3,6В до 5В. Источником питания может быть как аккумулятор от сотового телефона , так и гальванические элементы (батарейки) или аккумуляторные батарейки. В качестве источника питания можно устанавливать литий-ионные аккумуляторы от сотового телефона напряжением 3,6В или 3,7В или 3 гальванических элемента (батарейки) по 1,5в или 3 аккумуляторных батарейки напряжением по 1,2В.
Для определения позиции относительно линии на роботе установлены три фототранзистора ФТ2К отечественного производства. Фототранзисторы установлены под днищем робота в передней части печатной платы.
3.ИНДИКАТОРЫ.
На печатной плате установлено 3 индикатора положений трассы, индикатор разрядки аккумулятора/батареи и индикатор процесса зарядки.
- Индикация положения трассы. Положение трассы показывают три светодиода красного цвета свечения расположенных в передней части робота сверху. Три светодиода сигнализируют о положении рядом расположенного фототранзистора. Пока любой из фототранзисторов расположен над чёрной линией связанный с ним светодиод не светиться. Как только фототранзистор оказывается вне линии, связанный с ним светодиод зажигается.
- Индикация разрядки батарейки (аккумулятора). Для индикации используется мигающий светодиод красного цвета свечения. Индикатор разрядки сигнализирует о низком напряжении аккумуляторов в случае их использования. Индикатор начинает работать при снижении питающего напряжения до 3 вольт.
- Индикатор процесса зарядки. На печатной плате робота установлен разъём через который можно подзарядить аккумуляторы. Во время процесса зарядки светиться светодиод зелёного цвета свечения.
На печатной плате установлен подстроечный резистор с помощью которого можно изменять чувствительность фототранзисторов. Регулировка чувствительности к источнику света выполнена нестандартно. Для этого изменяется яркость свечения ик-светодиодов и отражённый от поверхности свет изменяет состояние фототранзисторов. Чем ярче будут светиться ик-светодиоды, тем больше чувствительность у фототранзисторов к отражённому излучению и наоборот.
5.ЯЧЕЙКА ПАМЯТИ.
Робот запоминает направление схода с линии и автоматически возвращается обратно на трассу. Ячейка памяти позволяет запомнить два направления схода с трассы (влево и вправо).
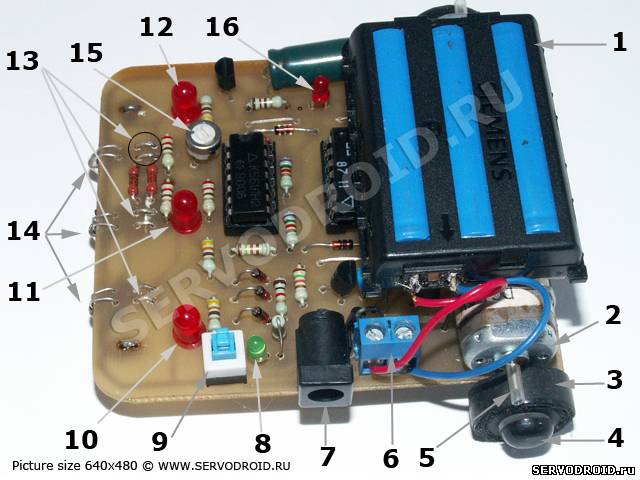 |
КОМПОНЕНТЫ КОНСТРУКЦИИ РОБОТА
1.Аккумуляторная батарея от сотового телефона напряжением 3,6В.
2.Мотор PPN13LB11C. 3.Колесо ролик диаметром 12мм. 4.Боковые ограничители из канцелярской кнопки. 5.Протектор (трубочка) для увеличения сцепления с колесом. 6.Клеммник винтовой для подключения источника питания. 7.Разъём для подзарядки аккумуляторов. 8.Индикатор (светодиод) процесса зарядки 9.Выключатель питания кнопка с фиксацией. 10.Индикатор (светодиод) положения линии слева. 11.Индикатор (светодиод) положения линии по центру. 12.Индикатор (светодиод) положения линии справа. 13.Инфракрасные светодиоды подсветки линии. Установлены со стороны токоведущих дорожек. 14.Фототранзисторы определяющие положение линии. 15.Регулятор яркости свечения трёх ик-светодиодов. 16.Индикатор (светодиод) разрядки аккумулятора (батареи). фото.4.нажимайте для просмотра в полном размере. |
3.ПРИНЦИП РАБОТЫ.
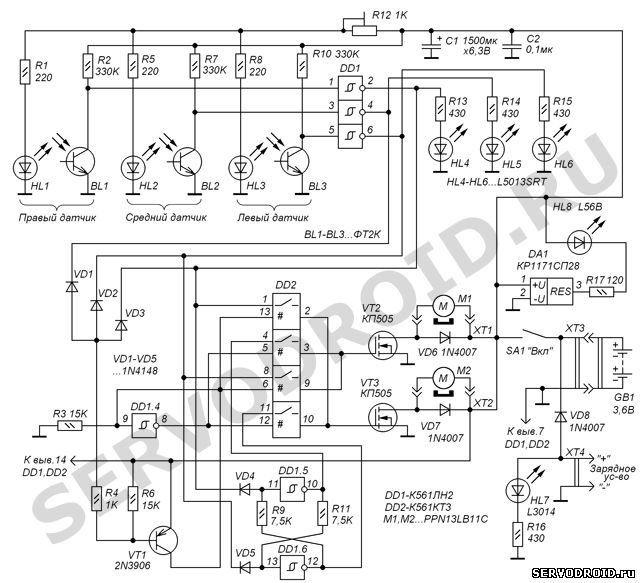 Рис.1. Электрическая схема нажать для увеличения. |
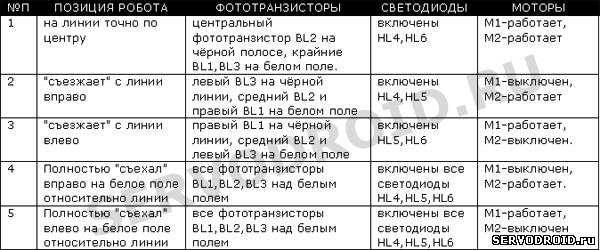
Допустим, робот сходит с линии вправо, так, что средний BL2 и правый BL1 фототранзисторы оказываются над белым фоном, а левый фототранзистор BL3 над чёрной полосой. В этом случае транзистор VT1 открыт низким уровнем через диод VD2. На коллекторе транзистора VT1 высокий уровень, поэтому включены элементы DD2.1,DD2.3. Высокий уровень с выхода 4 элемента DD1.2 запирает диод VD1. А высокий уровень с выхода 2 DD1.1 беспрепятственно проходит через вывод 1 элемента DD2 на затвор полевого транзистора VT3 и открывает его.
Правый двигатель M2 начинает работать, а левый будет выключен. Робот начнёт поворачивать влево возвращаясь на линию до тех пор, пока центральный фототранзистор BL2 не окажется над чёрной полосой. Тогда включится правый двигатель, и робот вновь поедет вперёд. Аналогичные процессы происходят, когда робот отклоняется влево при этом левый и центральный фотоэлементы оказываются над белым фоном листа, а правый над чёрной полосой. Только теперь включается левый двигатель, а правый останавливается. Триггер на элементах DD1.5,DD1.6 запоминает положение робота относительно линии и реагирует благодаря диодам VD4,VD5 только на отрицательные перепады напряжения. Рассмотрим ситуацию, когда робот полностью съезжает с линии вправо. До того момента как робот съедет с полосы левый фототранзистор BL3, находясь, некоторое время над полосой сформирует положительный потенциал, который будет инвертирован элементом DD1.3. Триггер на элементах DD1.5,DD1.6 переключается низким уровнем, поступающим через диод VD5. При этом на его выходе 12 элемента DD1.6 установится высокий уровень. Этот уровень поступит к закрытому пока входу 11 элемента DD2.4.
|
Если робот полностью съезжает с линии вправо. Все фотоэлементы BL1-BL3 оказываются над белым фоном листа. Диоды VD1-VD3 запираются высоким логическим уровнем с выходов элементов DD1.1-DD1.3, и транзистор VT1 закрывается. На его коллекторе появляется низкий потенциал, поступающий через резистор R3. Одновременно элементы DD2.1,DD2.3 закрываются низким потенциалом. На выходе элемента DD1.4 формируется высокий логический уровень, который открывает элементы DD2.2,DD2.4. Выходы триггера DD1.5,DD1.6 оказываются подключенными к затворам транзисторов VT2,VT3. Состояние выходов триггера было установлено направлением схода с линии. Поэтому высокий уровень поступает на затвор транзистора VT3 и открывает его, а на затворе транзистора VT2 присутствует запирающий низкий уровень. Правый двигатель начинает работать, а левый будет выключен до тех пор, пока робот не вернётся на линию, а фототранзистор BL2 окажется над чёрной линией. Аналогично робот возвращается при полном съезде с линии в левую сторону, только теперь на выходе 12 триггера будет низкий уровень, а на выходе 10 высокий. Эти потенциалы включат соответственно левый двигатель и выключат правый. Диоды VD6,VD7 защищают полевые транзисторы VT2,VT3 от э.д.с. самоиндукции двигателей.
4.ДЕТАЛИ И МАТЕРИАЛЫ.
Таблица.1.Список радиокомпонентов.
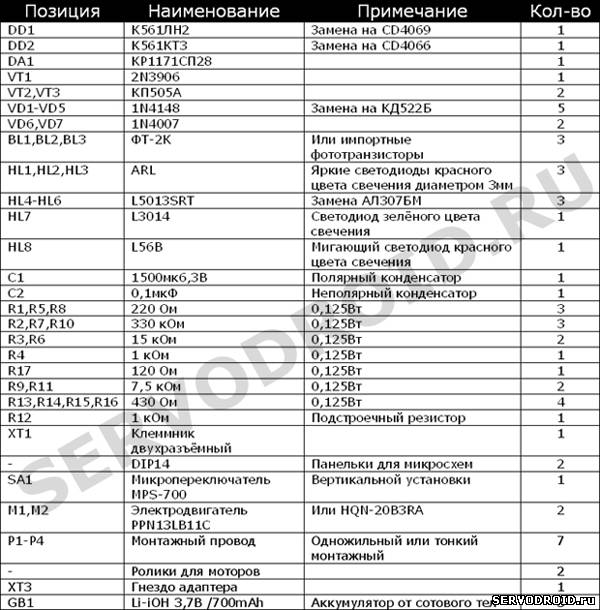
Примечание.2. Длинный вывод фототранзистора ФТ2К -это коллектор, на позиции обозначен квадратиком с плюсом.
Примечание.3. В конструкции робота можно использовать практически любые низковольтные моторы уплощённой формы с подходящими размерами.
5.ИНСТРУКЦИЯ ПО СБОРКЕ.
1.Изготовление печатной платы.
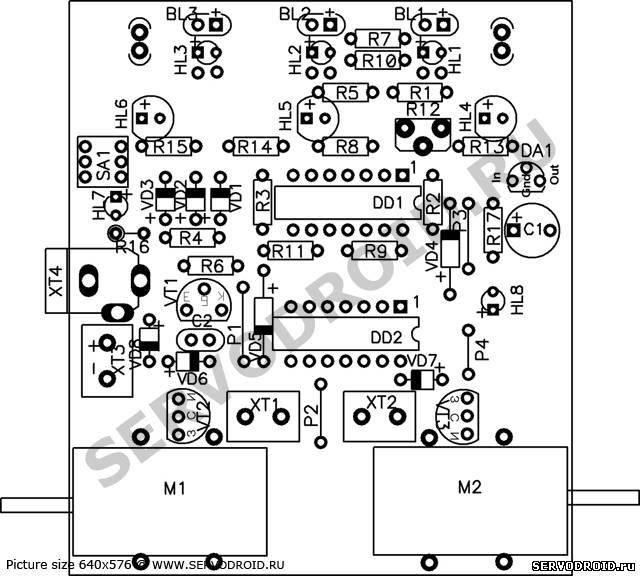
Рис.2.Монтажный чертёж. Нажать фото для увеличения.
2.Монтаж радиокомпонентов.
МОНТАЖ ФОТОТРАНЗИСТОРОВ. Фототранзисторы BL1,BL2,BL3 необходимо паять также как и все радиокомпоненты, но с длинной ножек около 10мм. Затем загните фототранзисторы вниз, так чтобы их корпус был ориентирован перпендикулярно поверхности трассы (фото.5).
МОНТАЖ ИНФРАКРАСНЫХ СВЕТОДИОДОВ. Обратите внимание на позиции для установки инфракрасных светодиодов HL1,HL2,HL3. Их необходимо установить со стороны токоведущих дорожек. Возьмите инфракрасный светодиод и установите его на позицию со стороны токоведущей дорожки. Его выводы окажутся со стороны радиокомпонентов. С помощью монтажного инструмента (острогубцев) проденьте выводы светодиода в рядом расположенные отверстия и запаяйте (фото.5).
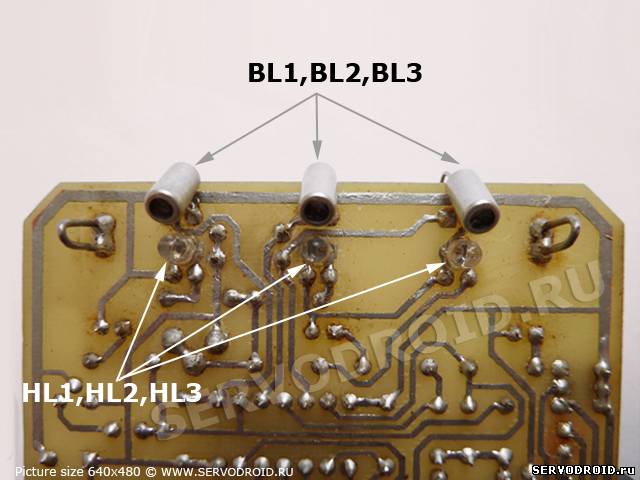
фото.5.нажать фото для увеличения.
3.Изготовление и монтаж передних опор.
В качестве передних опор используются две половинки от металлической скрепки. Металлическую скрепку разрезают кусачками пополам и устанавливают половинки в передней части печатной платы слева и справа (фото.6). Позиции для установки передних опор расположены в передней части печатной платы по боками. Высота обоих передних опор не должна превышать 10мм. Затем концы скрепки запаивают, используя нейтральный беспромывочный флюс для облегчения пайки. После монтажа передних опор(1) при движении робот будет опираться на них.
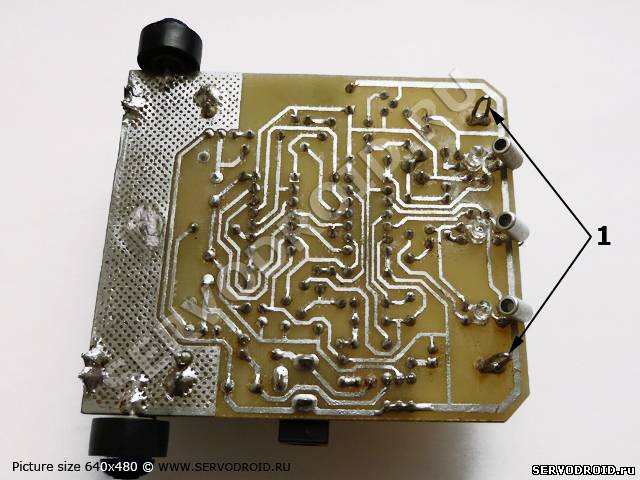
фото.6.нажать фото для увеличения.
4.Изготовление силовой рамы и монтаж моторов.
Для крепежа двигателей к печатной плате используют канцелярские скрепки. Один мотор фиксируется двумя канцелярскими скрепками. Скрепки предварительно разгибают в пруток, а затем формируют с помощью монтажных плоскогубцев П-образную скобу. Перед тем как установить моторы вырежьте и приклейте на их позиции прямоугольники из двухстороннего тонкого скотча. Установите моторы на позиции закрепите П-образными скрепками, которые необходимо паять со стороны токоведущих дорожек. После закрепления скобами моторы будут надёжно зафиксированы на позициях.
5.Изготовление и монтаж осевой подвески.
В качестве колеса используется ролик диаметром 12мм, который необходимо закрепить. Для сборки осевой подвески вам потребуются: кнопки канцелярские силовые с пластмассовой ручкой и две канцелярские металлические скрепки. Не нарушайте последовательность сборки так как это важно!
Приобретите канцелярские кнопки с пластмассовой ручкой (фото.7). Выберите две кнопки одного цвета и приступайте к изготовлению осевой подвески.
1. Возьмите канцелярскую кнопку (не путать со скрепкой!) и залудите припоем острый металлический край канцелярской кнопки. Сделать это лучше, используя нейтральный флюс и по возможности быстрее. В противном случае вы рискуете проплавить место контакта с рукояткой и деформацию рукоятки.
2. Отпилите часть ручки у канцелярской кнопки, как показано на фотографии. Торец (место отпила) обработайте напильником, и отрежьте пластмассовую рукоятку Линия обреза пластмассовой ручки показана жёлтой линией (фото.8).
3. На ось из канцелярской кнопки оденьте резиновый ролик диаметром 12мм, который будет выполнять функции колеса.
 фото.7. |
 фото.8. |
После сборки осевая подвеска будет состоять из: резинового ролика нанизанного на канцелярскую кнопку. После сборки установите осевую подвеску на позицию со стороны токоведущих дорожек. Расположите колесо точно под валом мотора. Оденьте на вал мотора протектор, например резиновый колпачок от нового гелиевого стержня или просто трубочку.
Проверьте ролик на качество хода, вращение. Он должен вращаться свободно и вместе с тем не должен болтаться в диагональных направлениях. Иначе говоря, при вращении ролика не должно быть эффекта "восьмёрки” как у велосипеда. После такой настройки зафиксируйте ролик большим количеством припоя.
Обозначения на фото.9 и фото.10. 1-мотор, 2-трубочка, 3-ролик, 4-кнопка канцелярская. В авторском варианте ролика диаметром 12мм под рукой не оказалось, поэтому диаметр колеса был увеличен намоткой черной изоленты.
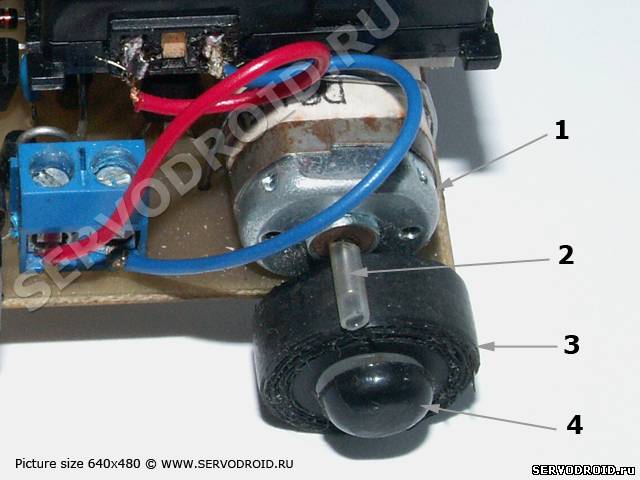 фото.9. |
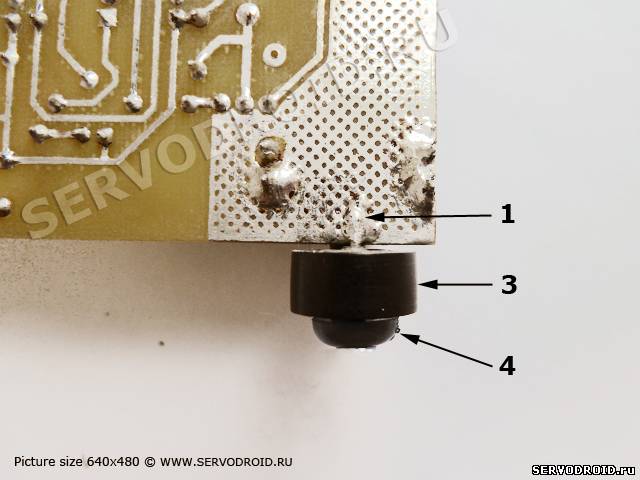 фото.10. |
 фото.11. |
 фото.12. |
6.НАСТРОЙКА РОБОТА.
- Со стороны токоведущих дорожек не должно быть замыканий припоем или не пропаянных выводов радиокомпонентов. Переверните плату и осмотрите её со стороны деталей. Проверьте правильность установки: всех транзисторов, конденсаторов и микросхем.
- В качестве источника питания используйте только хорошо заряженный аккумулятор!
- Необходимо правильно припаять выводы фототранзисторов ФТ2К (позиции BL1,BL2,BL3). Если фототранзисторы напаяны верно, то при их освещении будет загораться соответствующий светодиод на поверхности платы. Если сигнальные светодиоды HL4,HL5,HL6 будут установлены неверно, то проверить работу фототранзисторов визуально будет невозможно.
- Проверьте работу инфракрасных светодиодов (позиция HL1,HL2,HL3). Это можно сделать с помощью фотокамеры в сотовом телефоне или цифрового фотоаппарата. Эти приборы очень хорошо "видят” инфракрасное излучение и вам останется только навести объектив на инфракрасный светодиод. На жк-экране сотового телефона будет хорошо видно свечение беловатого цвета исходящее от светодиода. Яркость свечения этого светодиода определяется подстроечным резистором R12.
МОТОРЫ. Особое внимание обратите на качество сцепления вала мотора и колеса! Если робот едет назад или поворачивает назад, в одну из сторон, перепаяйте выводы подключения того мотора, вал которого вращается наоборот (не по ходу движения).
ИНДИКАТОРНЫЕ СВЕТОДИОДЫ. Если не светиться индикаторный светодиод HL4, проверьте монтаж (установку и качество пайки) ик-светодиода HL1 и фототранзистора BL1. Если не светиться индикаторный светодиод HL5, проверьте монтаж (установку и качество пайки) ик-светодиода HL2 и фототранзистора BL2. Если не светиться индикаторный светодиод HL6, проверьте монтаж (установку и качество пайки) ик-светодиода HL3 и фототранзистора BL3.
Проведите проверку на короткие замыкания рядом с указанными светодиодами и фототранзисторами со стороны токоведущих дорожек. Возможна неправильная установка микросхемы DD1 (К561ЛН2) или не качественная пайка её контактов, замыкания.
-Если светиться светодиод HL5, смотрите выводы 3 и 4 микросхемы DD1 (К561ЛН2).
-Если светиться светодиод HL6, смотрите выводы 5 и 6 микросхемы DD1 (К561ЛН2).
Перед запуском установите, робот на линию так, чтобы центральный фотоэлемент был над линией, а два других на белом фоне.
Сборка окончена!
Скачать архив Трасса для соревнований line robot
Скачать архив Архив к роботу следопыту с чертежами. Размер архива 376kb
Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим!
автор Алексей Высоковольтный www.servodroid.ru
© Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
| Всего комментариев: 35 | |


| |










