23:09 ОХОТНИК ЗА СВЕТОМ | ||||||||||||||||||||||||
 Охотник за светом - так называется очередной робот из серии PaperBot. Как следует из его названия он "бежит" за источником света. Если луч света падает сбоку, то робот поворачивается в его сторону.
***
На видео.1 манёвр обхода кеглей-банок с управлением от луча света фонарика. Обратите внимание на большую скорость поворота характерную для роботов с косым расположением моторов по отношению к поверхности.
ВСЕ РОБОТЫ на канале DROID1020 !!! подпишись и смотри. Переход по ссылке жми!
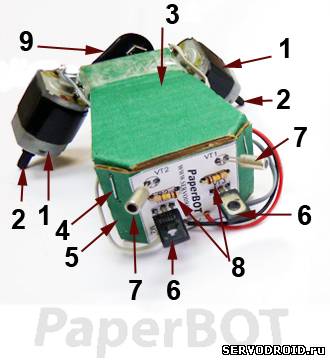
ALL ROBOTS on the DROID1020 channel! ! ! be signed and look. Transition according to the link 2.ХАРАКТЕРИСТИКИ И ФУНКЦИОНАЛЬНОСТЬ. Поиск источника света обеспечивается с помощью двух фототранзисторов размещённых в передней части робота. В конструкции робота заложены простые многофункциональные решения. Так, например монтажная плата, является конструктивным элементом корпуса (передняя часть) и передней опорой (при движении робот опирается на кромку).
Робот быстро реагирует на яркий источник света и так же быстро поворачивает. Это необходимо учитывать при управлении световым лучом.
В качестве источника питания используется батарейка напряжением 9 вольт. Батарейка одновременно является элементом опоры и монтажа для всех силовых узлов робота, крепежа моторов и корпуса. В целях упрощения конструкции робота, для включения и выключения используется клип-разъёма. Его поворотом относительно одного из выводов батарейки включают или выключают робота.
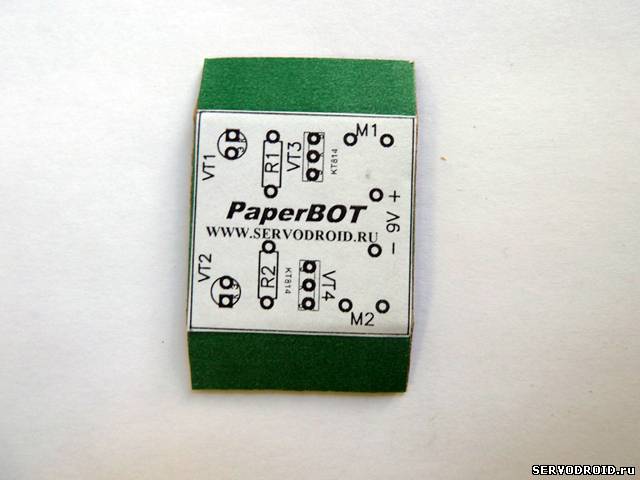
3.ПРИНЦИП РАБОТЫ. На рис.1. показана электрическая схема робота. После включения источника питания робот не двигается, если на фототранзисторы VT1,VT2 не падает свет. Так как электрическая схема состоит из двух одинаковых схемотехнических частей, рассмотрим работу одной половины схемы.
4.ДЕТАЛИ И МАТЕРИАЛЫ. В качестве элементов корпуса используется тонкий гофрокартон. Особенность этого материала и его повышенной прочности в двух слоях между которыми находится также картон в гофрированном (гармошкой) состоянии. Как правило такой картон используется в качестве материала для коробок из -под бытовой аппаратуры, компьютерной техники.
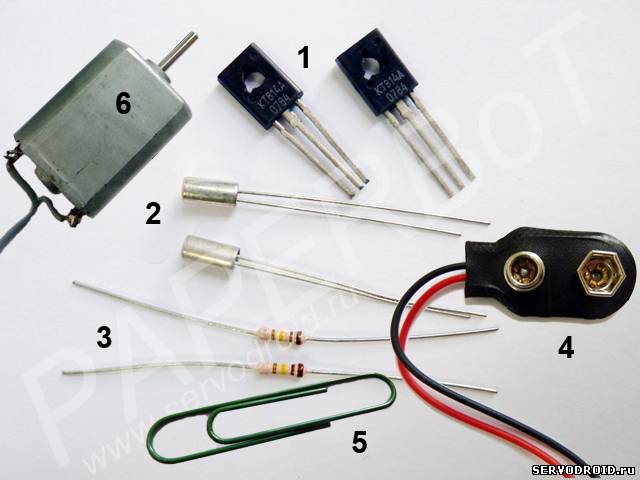
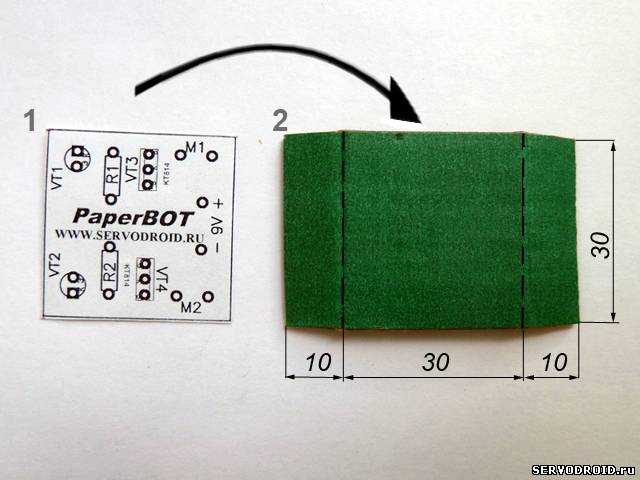
Таблица.1.Список радиокомпонентов.  5.ПОШАГОВАЯ ИНСТРУКЦИЯ СБОРКИ РОБОТА. Для успешной сборки точно следуйте инструкциям. Сборка робота выполняется на шаблоне, который необходимо распечатать на принтере. Помните, все чертежи архива приведены в точных размерах, подгонять или изменять размеры до печати категорически не рекомендуется! Скачайте шаблон, размещённый в конце страницы, в виде архивного файла Шаблон выполнен в точных натуральных размерах. Распечатайте шаблон на листе офисной бумаги формата А4. Вырежьте шаблон по толстым линиям . Выполните предварительные сгибы также ориентируясь по пунктирным линиям чертежа. Шаг.1.Изготовление корпуса (передней части). Изготовьте из тонкого и плотного гофрокартона основу, которая будет передней частью робота. Размеры в миллиметрах и линии сгиба основы (пунктиром) показаны на фото.4. Наклейте шаблон монтажной платы на картонную основу (фото.5). В местах установки радиокомпонентов шилом просверлите отверстия (фото.6).
нажимайте фото для открытия в полном размере
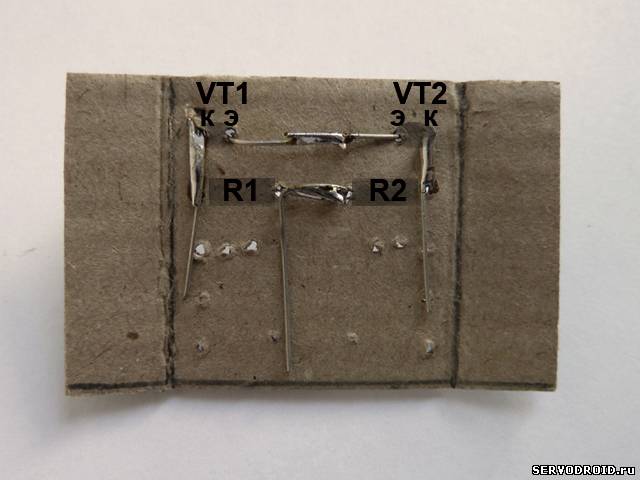
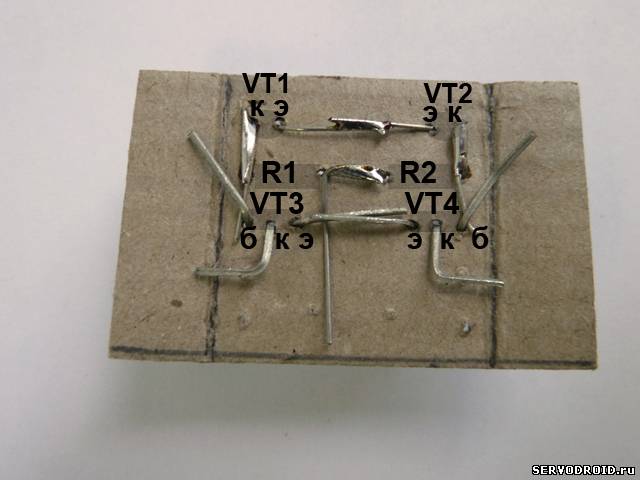
Шаг.2.Монтаж радиокомпонентов. Приступаем к монтажу радиокомпонентов. Монтаж начните с установки фототранзисторов ФТ2К. Длинный вывод фототранзистора - это вывод коллектора, короткий вывод транзистора - вывод эмиттера. На позициях VT1,VT2 для фототранзисторов отверстия помечены буквами "Э", "К", это означает, что в данные отверстия необходимо установит фототранзистор с учётом его выводов (фото.7, фото.8). Эмиттеры (э) фототранзисторов VT1,VT2 соедините, обрежьте и спаяйте вместе с противоположной стороны (фото.9). Длинные выводы коллекторов (к) фототранзисторов отогните вниз. Установите резисторы на позиции R1,R2 крайние выводы резисторов отгибайте в стороны выводов коллекторов (к) фототранзисторов. А оставшиеся выводы резисторов R1,R2, которые расположены близко друг к другу сгибайте навстречу друг другу, один из которых нужно отрезать накоротко, а второй выгнуть ещё и в низ к отверстиям подключения источника питания. Запаивайте эти выводы резисторов друг с другом (фото.9). нажимайте фото для открытия в полном размере
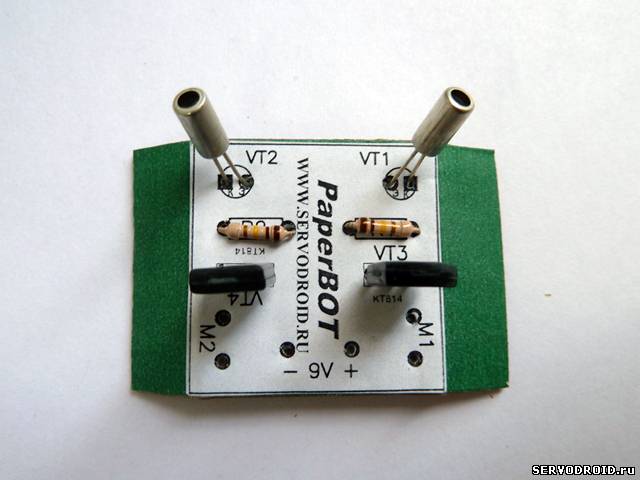
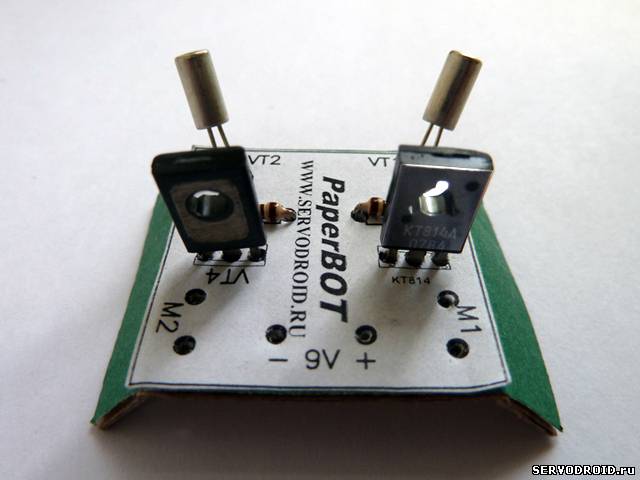
Выполняйте пайку всех согнутых во встречном направлении выводов деталей (фото.10). Установите транзисторы КТ814 на позиции VT3,VT4 с учётом топологии (расположения) выводов. Для установки воспользуйтесь топологией показанной на фото.8. Обратите внимание на позиции установки транзисторов VT3,VT4, транзисторы устанавливают в разных ориентациях. Установка транзисторов КТ814 на позициях, хорошо видна на фото.11, фото.12, фото.13. нажимайте фото для открытия в полном размере
Начинаем подключать транзисторы КТ814 (позиции VT3,VT4). Выгибайте коллекторы на обоих транзисторах в виде буквы "Г" (фото.14). Выгибайте выводы эмиттеров навстречу друг другу (фото.14). Выгибайте выводы баз в сторону рядом расположенных выводов резисторов и соединённых с ними выводов коллекторов фототранзисторов (фото.14). Выполните пайку всех встречно направленных выводов как на фото.15. нажимайте фото для открытия в полном размере
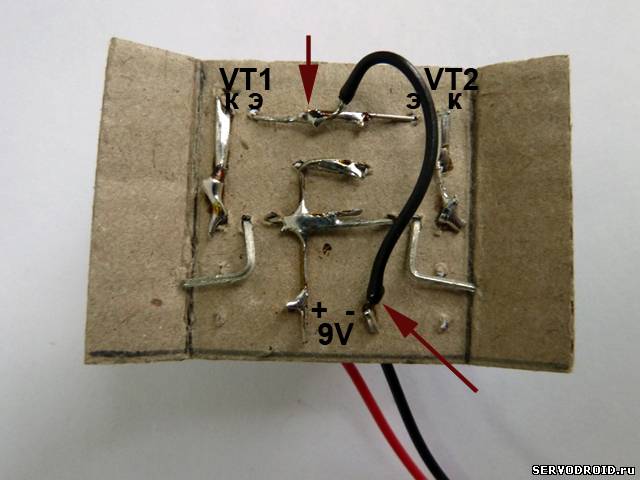
Подключаем клип-разъём, назначение которого соединение между монтажной платой и батарейкой 9В. Клип-разъём имеет два провода: чёрный и красный. Чёрный провод клип-разъёма - это минус источника питания, красный провод-это плюс от источника питания. На монтажной плате (фото.16) найдите отверстия помеченные "+" и "-", подключайте и запаивайте провода с учётом полярности. Красный провод клип-разъёма подпаяйте к выводу расположенному рядом (эмиттеры транзисторов КТ814) (фото.17). Чёрный провод необходимо подключить с помощью добавочного короткого чёрного проводка к эмиттерам фототранзисторов ФТ2К (фото.17). На фото.17 красными стрелками показаны места подпайки добавочного чёрного провода. нажимайте фото для открытия в полном размере
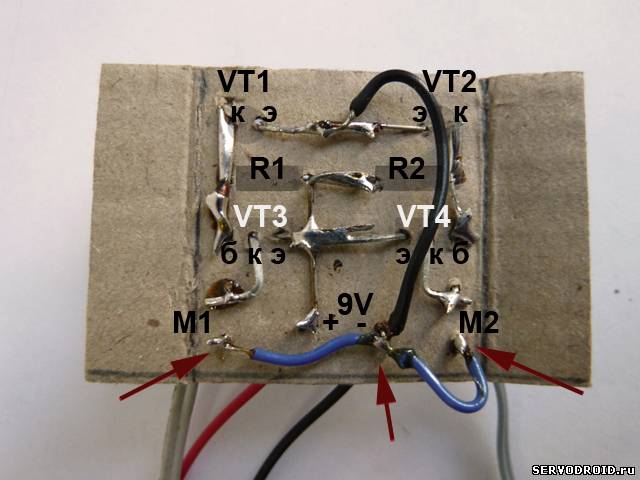
Подключаем моторы. Для подключения моторов возьмите провод длиной не менее 10см. Зачистите концы провода и залудите припоем. Найдите на монтажной плате отверстия подключения моторов M1,M2 (фото.19). Выполняйте подключения моторов ориентируясь по фото.18. "Верхние" по фото.18 выводы моторов M1,M2 паяйте к согнутым ввиде буквы "Г" коллекторам транзисторов КТ814. "Нижние" по фото.18 выводы моторов M1.M2 подключают через короткий синий провод к минусовому проводу идущему от источника питания. Красные стрелки указывают на места подключений дополнительных синих проводков. Все соединения рекомендуется выполнять тонким многожильным проводом.  Фото.19 ВАЖНО! После сборки корпуса устанавливайте моторы перекрёстно, то есть подключенный с правой стороны мотор нужно установить в левой части робота, а подключенный с левой стороны мотор нужно установить справа. Только в этом случае робот будет бежать за источником света.
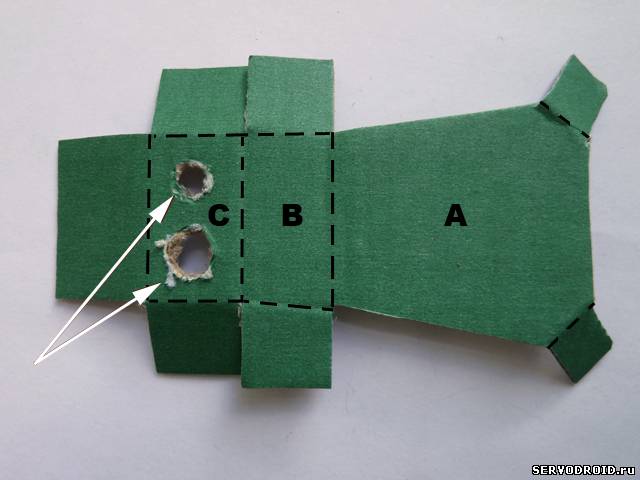
Шаг.3.Полная сборка корпуса. Из скачанного архива возьмите и распечатайте чертёж верхней части корпуса. Линии сгиба показаны пунктиром. На чертежах пометки из букв: A,B,C означают следующее. Буква A указывает на то, что это верхняя часть поверхности. Буква B указывает на то, что после сгиба эта область будет боковой поверхностью. Буква C указывает на то, что после сгиба эта область будет нижней частью. Этот шаблон нужно наклеить на лист картона и вырезать по контуру. У вас должна получиться фигура как на фото.20. Возьмите батарейку 9В и приложите к части "С". Обведите карандашом контакты батарейки и аккуратно вырежьте ножницами. Белыми стрелками показаны отверстия, которые необходимо вырезать (фото.20, фото.21). Положите батарейку так как показано на фото.21. Проденьте контакты батарейки и по линиям сгиба соберите картон, так чтобы батарейка оказалась внутри (фото.22). Возьмите прозрачный скотч и не отпуская собранных краёв обмотайте несколько раз для закрепления. Белая стрелка указывает на место обмотки скотчем (фото.22). нажимайте фото для открытия в полном размере
Чтобы батарейка не проскальзывала и была надёжно зафиксирована отрежьте и прикрепите кусок двустороннего скотча. На фото.23 белой стрелкой показана позиция где необходимо прикрепить скотч. Так как обе его поверхности имеют высокую клеящую способность, то проблем возникнуть не должно. Двусторонний скотч можно приобрести в хозяйственном магазине или в магазине строительных материалов.
нажимайте фото для открытия в полном размере  Фото.23 Выполните соединение передней части (монтажная плата с деталями) с верхней частью корпуса. На краях верхней части корпуса есть прямоугольники которые необходимо загнуть и расположить так чтобы получилось как на фото.24. После возьмите скобы от степлера и предварительно сделав отверстия шилом скрепите скобами переднюю и верхнюю части корпуса робота. На фото.24 установленные скобы обозначены белыми стрелками.
нажимайте фото для открытия в полном размере  Фото.24 При движении робота по поверхности, передняя часть будет испытывать значительные нагрузки. Поэтому чтобы не произошло изгибов или слома передней части рекомендуется рекомендуется залить термопластичным клеем внутреннюю поверхность в месте соприкосновения двух частей корпуса (фото.25). Для заливки удобно использовать клеевой пистолет, который предназначен для нагревания, плавления и нанесения термопластичного клея на поверхности (фото.25). Белыми стрелками показаны области нанесения клея. А также приведена фотография клеевого пистолета.
нажимайте фото для открытия в полном размере  Фото.25 Чтобы не устанавливать дополнительно выключатель включение и выключение робота выполняют с помощью поворота клип-разъёма. Фазы поворота клип-разъёма показаны на фото.26. В начальной позиции клип-разъёма (1) робот выключен, конечной позиции робот включен (3).
нажимайте фото для открытия в полном размере  Фото.26 нажимайте фото для открытия в полном размере
 Фото.27 На фото.28 показана последовательность монтажа моторов к корпусу. Приматывайте силовую крепёжную скрепку(1) к мотору с помощью изоляционной ленты(2). Монтаж моторов нужно проводить последовательно. Для крепежа моторов к корпусу (задней части) воспользуйтесь прозрачным скотчем(3). Сначала приматывайте скотчем один мотор, затем приматывайте скотчем второй мотор(2). Для того чтобы моторы удерживались надёжно нужно наматывать скотч(3) с некоторым натяжением. После монтажа моторов для повышения сцепления с поверхностью на оси моторов оденьте протекторы из резины. Протекторы возьмите от нового гелиевого стержня (придётся купить два стрежня).
нажимайте фото для открытия в полном размере
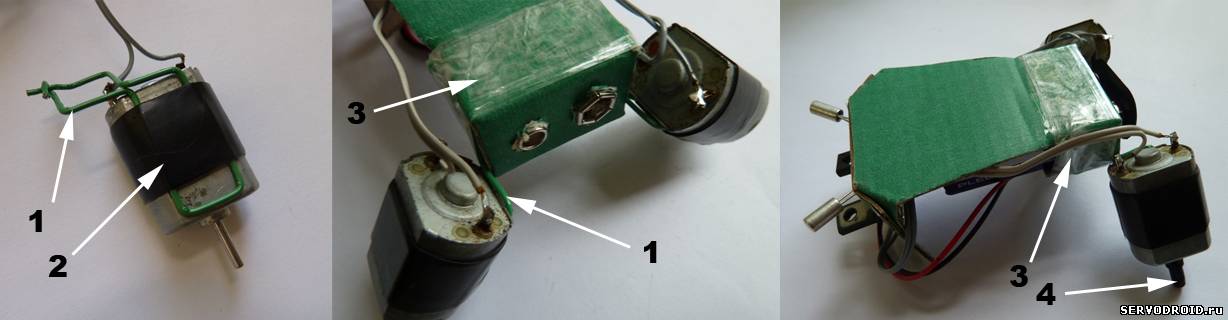 Фото.28 Отрегулируйте угол расхождения моторов относительно поверхности. Добейтесь наилучшего сцепления и оптимальной скорости передвижения робота. Перед запуском рекомендуется установить "свежую" батарейку. Установите клип-разъём и переведите его в положение включено. Помните, робот после включения питания никуда не поедет до тех пор, пока вы не начнёте светить фонариком на фототранзисторы. Посветите фонариком на фототранзистор расположенный справа, робот должен повернуться вправо. Если посветить на левый фототранзистор, то робот повернётся влево. При освещении обоих фототранзисторов робот поедет вперёд.. СБОРКА ОКОНЧЕНА! Скачать архив пароль к архиву: hunt100 Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим! © Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено! | ||||||||||||||||||||||||
|
| ||||||||||||||||||||||||










| Всего комментариев: 57 | |



| |







