23:12 РЕПУЛЬСОИД | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Репульсоид - имеет всего один вертикально установленный двигатель, который используется для передвижения и обхода препятствий. При включении питания на мотор поступают импульсы тока приводящие робота в движение. Ширина импульсов изменяется под действием внешнего освещения. Если освещённость в помещении высока или на робота светить фонариком, он передвигается быстро. Если освещённость в помещении низкая или робота накрыть газеткой он остановиться. Боковая панель робота упирается в препятствие и сообщает новое направление движения за счет приложения усилия от оси двигателя.$CUT$
ФУНКЦИИ РОБОТА:
***
1.КОНСТРУКЦИЯ.
После включения питания робот приходит в движение. Одновременно с этим начинает мигать светодиод, сигнализируя о нормальном режиме работы импульсного генератора. Вертикально установленный двигатель, управляется импульсами тока, ширина которых изменяется в зависимости от уровня освещения фотоэлемента работа. Если посветить фонариком на фотоэлемент, то скорость передвижения по поверхности увеличится в несколько раз. С помощью подстроечного резистора можно отрегулировать ширину шага от минимального до максимального. Робот очень чувствителен к изменению освещённости и в затемнённом помещении передвигается очень медленно. нажимайте фото для просмотра в полном размере.
2.ХАРАКТЕРИСТИКИ И ФУНКЦИОНАЛЬНОСТЬ.
Как было сказано выше робот имеет два режима работы, два способа передвижения, индикаторы, сигнализирующие о состоянии системы управления и разрядки батарейки.
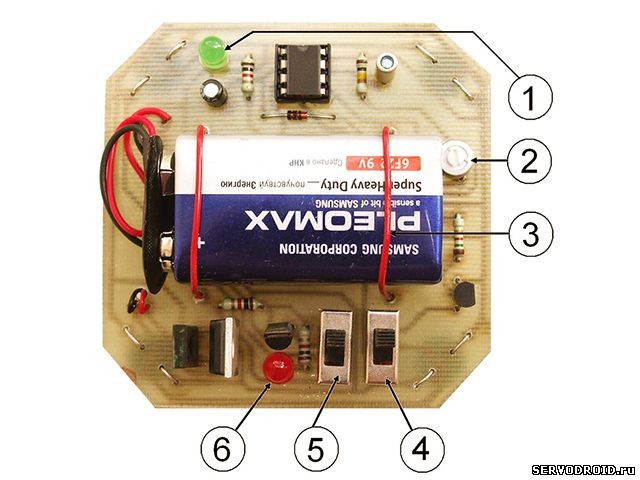
РУЖИМ “SMART”. Робот реагирует на освещенность в помещении. Передвигается с переменной скоростью изменяющейся в зависимости от яркости освещения в помещении. При этом на двигатель поступают импульсы тока различной длительности. Чем ярче освещение, тем быстрее передвигается робот и чем слабее - тем медленнее. В полной темноте робот передвигается очень медленно. Для включения этого режима установите переключатель в позицию “smart”. РУЖИМ “SUMO”. Робот обладает необычной способностью захватывать и перемещать любые лёгкие предметы, например, спичечные коробки. Эта способность используется при проведении состязаний между подобными роботами. Включается переключателем SB2 в положении “sumo”. ПЕРЕДВИЖЕНИЕ. Робот передвигается двумя способами: ездит и ходит. Также возможен и вариант произвольной комбинации шага и движения, быстро сменяющие друг друга. Езда характеризуется плавным передвижением без рывков. “Ходьба” характеризуется передвижением рывками или шажками. Выбор режимов производиться регулировкой подстроечным резистором R2 и переключателем SB2 на панели робота. Установите переключатель SB2 в положение “Smart”. Отрегулируйте подстроечным резистором R2 ширину шага. ИНДИКАТОРЫ. -Робот имеет встроенный индикатор активности на светодиоде HL1. При включении напряжения питания светодиод HL1 излучает световые импульсы и сигнализирует о воздействии света на робота. При ярком освещении светодиод будет мигать часто, и робо передвигаться быстро. В затемнённом - наоборот редко, соответственно робот будет замедлять своё передвижение. -Детектор низкого напряжения питания подаёт световой сигнал, когда батарейка разряжается до уровня 5в. Светодиод HL2 при этом зажжётся красным светом, в таком случае рекомендуется заменить батарейку. При включении или выключении питания возможны кратковременные вспышки или свечения светодиода HL2. Это связано с кратковременными повышенными нагрузками в цепи питания. Включение автоматически. РЕЗЕРВНОЕ ПИТАНИЕ. При разрядке батарейки и истощении запаса энергии включается система прямой подачи энергии. Это позволяет в полтора-два раза увеличить продолжительность работы от одной батарейки. Как только эта схема активируется, светодиод HL2 погаснет. Назначение системы максимально продлить время работы робота от одной батарейки. Включается автоматически. Перечисленные выше особенности позволяют провести соревнования между роботами подобного типа, и управлять роботом с помощью направленного источника света. 3.ПРИНЦИП РАБОТЫ.
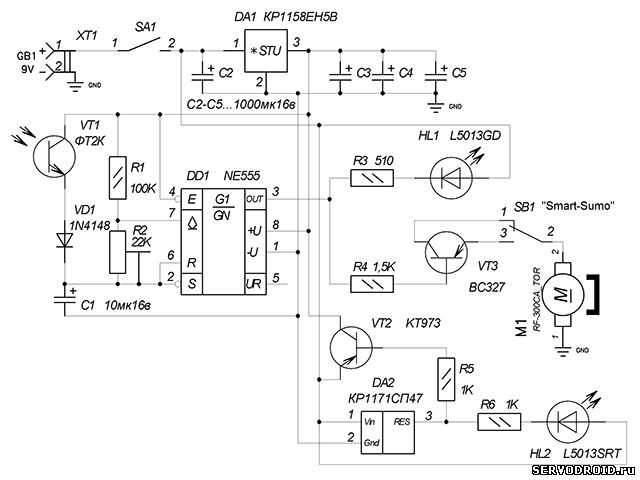
Электрическая схема показана на рис.1, На микросхеме-таймере NE555 реализован управляемый генератор импульсов. Яркий свет, попадающий на корпус фототранзистора VT1, уменьшает его сопротивление и изменяет частоту, и следовательно длительность импульсов на выходе микросхемы DD1. Выходной сигнал микросхемы DD1 представляет собой прямоугольные импульсы тока, которые поступают на светодиод HL1 и электродвигатель M1 в противофазе. В результате светодиод HL1 вспыхивает в паузах импульсов тока, а двигатель M1 включается во время отрицательного импульса.
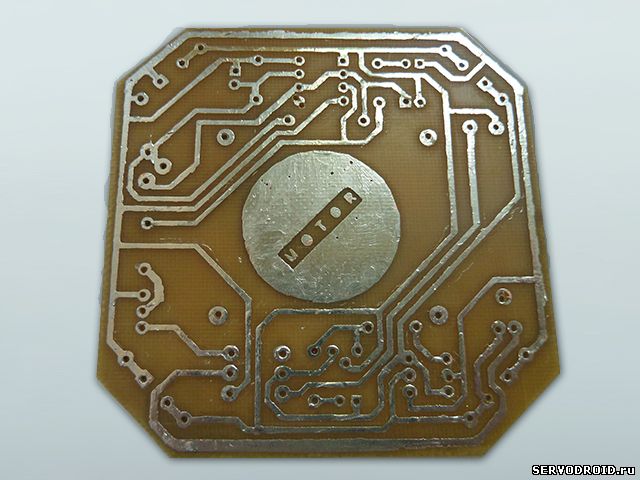
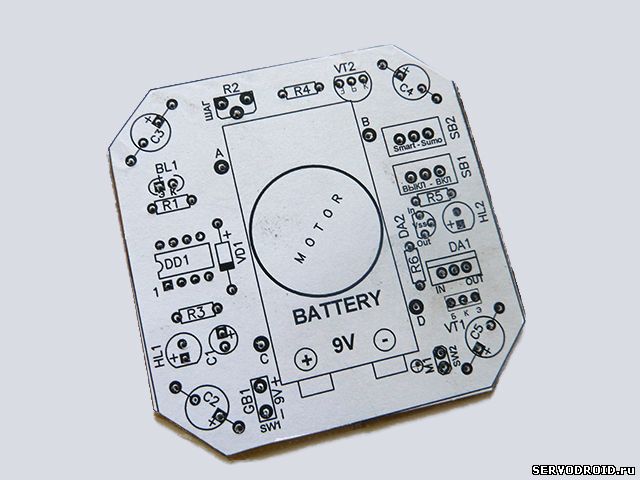
4.ДЕТАЛИ И МАТЕРИАЛЫ. Печатная плата изготовлена из односторонне фольгированного листа стеклотекстолита толщиной 1-1,5мм. Размеры печатной платы 70х70мм. Список радиокомпонентов приведён в таблице.1. Ссылка на архив с чертежами и разводкой под ЛУТ размещена в конце статьи! Всё чертежи в архиве в точных размерах. Не редактировать, не масштабировать!
Табл.1.Список радиокомпонентов.
Для правильной сборки придерживайтесь инструкций по сборке. Редактировать, масштабировать чертежи в архиве нельзя, так как все чертежи архива в точных размерах. Распечатайте монтажный чертёж на листе белой офисной бумаги формата А4. Для лут-перевода распечатайте термоклише с помощью лазерного принтера (разрешение должно быть 600dpi) на листе глянцевой бумаги.
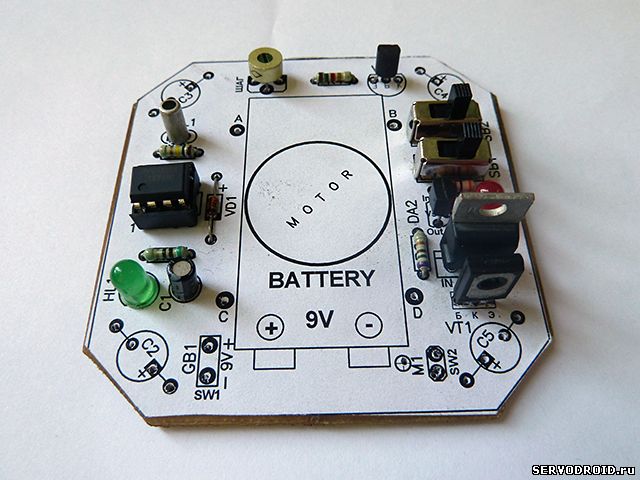
1.Монтаж радиокомпонентов. После изготовления печатной платы проверьте токоведущие дорожки на возможные замыкания. Приклейте к печатной плате монтажный чертёж так, чтобы все отверстия были совмещены. Затем выполняйте монтаж всех указанных в таблице 1 радиокомпонентов. Выполните монтаж панельки, а затем установите в неё микросхему DD1. Монтаж фототранзистора VT1 выполняйте на полную длину ножек. После монтажа отогните фотодиод так, чтобы его лицевая часть смотрела вверх.
нажимайте фото для просмотра в полном размере.
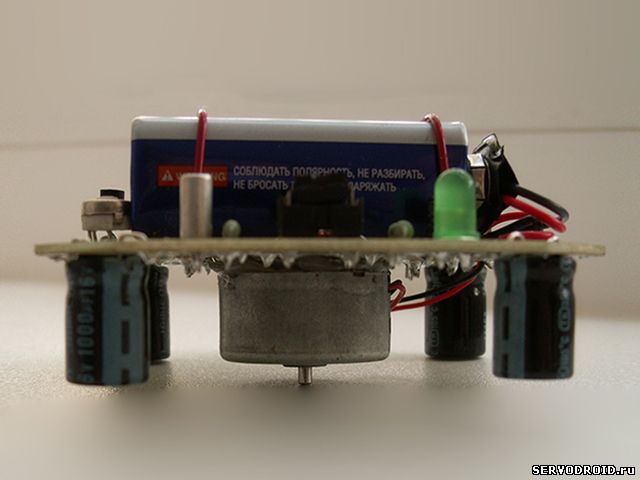
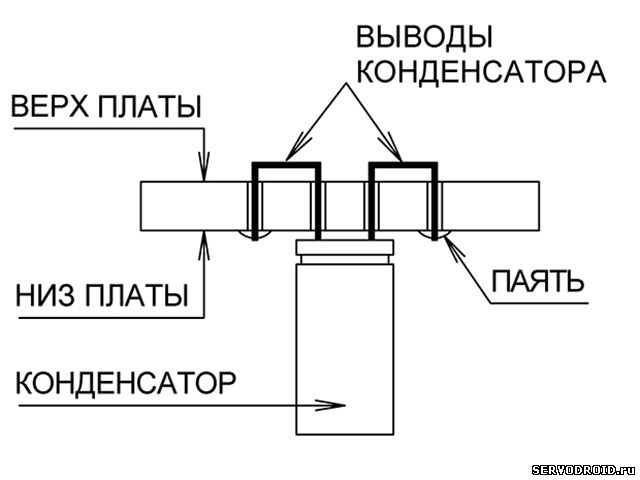
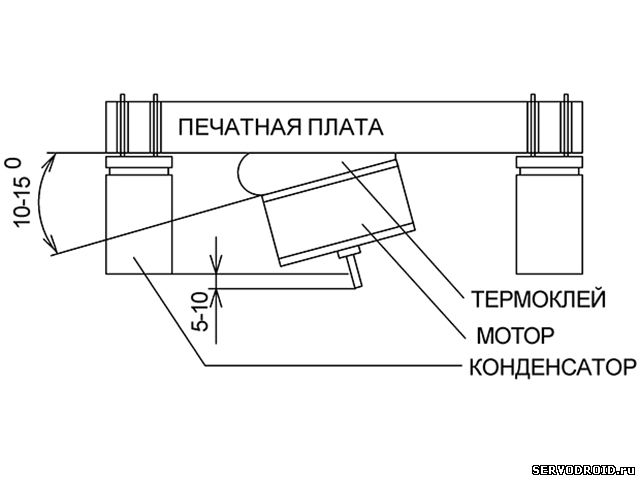
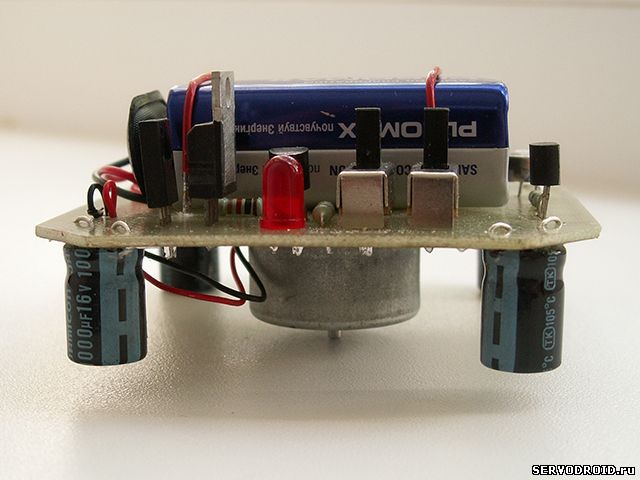
3.Монтаж опорных конденсаторов и мотора. Конденсаторы C2,С3,С4,С5 необходимо установить со стороны токоведущих дорожек. Продеть в отверстия (на позиции) выводы конденсатора, выгните выводы через эти отверстия и запаять со стороны токоведущих дорожек. Возьмите термоклей разогрейте его паяльником и равномерно размажьте по позиции отмеченной кружком со стороны токоведущих дорожек. Установите двигатель на позицию, и сильно прижмите к печатной плате. Через 1-2 минут клей застынет. Подпаяйте выводы двигателя в позиции на печатной плате M1. нажимайте фото для просмотра в полном размере.
3.Крепёж колеса. На фотографиях не показано, но рекомендуется установка колпачка на вал мотора для надёжного сцепления с грунтом и увеличения скорости передвижения. Такой колпачок можно взять например от гелиевого стержня или от старых электромеханических игрушек муфту. Наденьте на вал мотора колпачок или муфту. После этого робот буде в два-три раза быстрее передвигаться по поверхности из-за повышенного сцепления.
4.Установка и подключение батареи. Чтобы во время движения батарейка не сдвигалась и не скользила по поверхности платы её нужно закрепить. Для этого приобретите длинные канцелярские скрепки в изоляции. Выгибайте скрепки с помощью инструмента в п-образную форму с размерами соответствующими размерам батарейки (ширина и толщина). Когда п-образные скобы для крепежа будут готовы, зачистите их на концах. Найдите на чертеже монтажной платы, а затем и на самой печатной плате отверстия помеченные как A,B,C,D. Эти отверстия физически расположены рядом с батарейкой по обе стороны от неё. Установите батарейку в позицию на печатной плате. Установите п-образные скобы на свои позиции, и прижми ими батарейку. Пропаяйте концы скоб со стороны токоведущих дорожек большим количеством припоя. После этого батарейка окажется надёжно прижатой двумя крепёжными скобами и не будет смещаться при движении робота (фото.10). Серыми стрелками показаны п-образные крепёжные скобы. Клипсу-разъём оденьте на батарейку и включите робота выключателем смонтированным на печатной плате.
5.Включение и проверка работоспособности. Установите переключатель SB1 в положение “ON”. При этом робот должен начать движение, а индикаторный светодиод HL1 излучать световые импульсы.
нажимайте фото для просмотра в полном размере.
-Установите переключатель SB2 в положение “Smart”. Робот должен двигаться шажками. А ширина "шага" и скорость передвижения регулироваться подстроечным резистором R2. -Установите переключатель SB2 в положение “Sumo”. Робот должен двигаться быстро и плавно без рывков -Посветите фонариком на фототранзистор VT1. Переключатель SB2 переведите в положение “Smart”. Робот должен двигаться быстрыми шагами/рывками. -Закройте непрозрачным предметом фототранзистор VT1. Переключатель SB2 переведите в положение “Smart”. Робот должен двигаться медленно шагами/рывками. -Установите переключатель SB2 в положение “Smart” и вращайте подстроечный резистор R2 . При этом должна изменяться ширина "шага"/перемещения по поверхности.
6.Настройка робота. Если после монтажа радиокомпонентов и сборки силовых узлов /установка и крепление электродвигателей, микропереключателей ваш робот не функционирует, выполните несложную настройку по приведённой инструкции. Подробные рекомендации по устранению неисправностей приведены в таблице 2.
Табл.2 Дефекты и способы устранения.
В архиве: монтажный чертёж печатной платы, термоклише для лут-перевода печатной платы.
Архив к статье "repulsoid" пароль не требуется. Все чертежи в точных размерах, не изменять, не редактировать! Скачать архив Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим! автор Алексей Высоковольтный www.servodroid.ru © Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено! | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||




| Всего комментариев: 0 | |