Подписывайся на наш Телеграм канал, задавай вопросы по роботам, делись своими схемами,
помогай другим собирать роботов и набирайся опыта!
t.me/servodroid
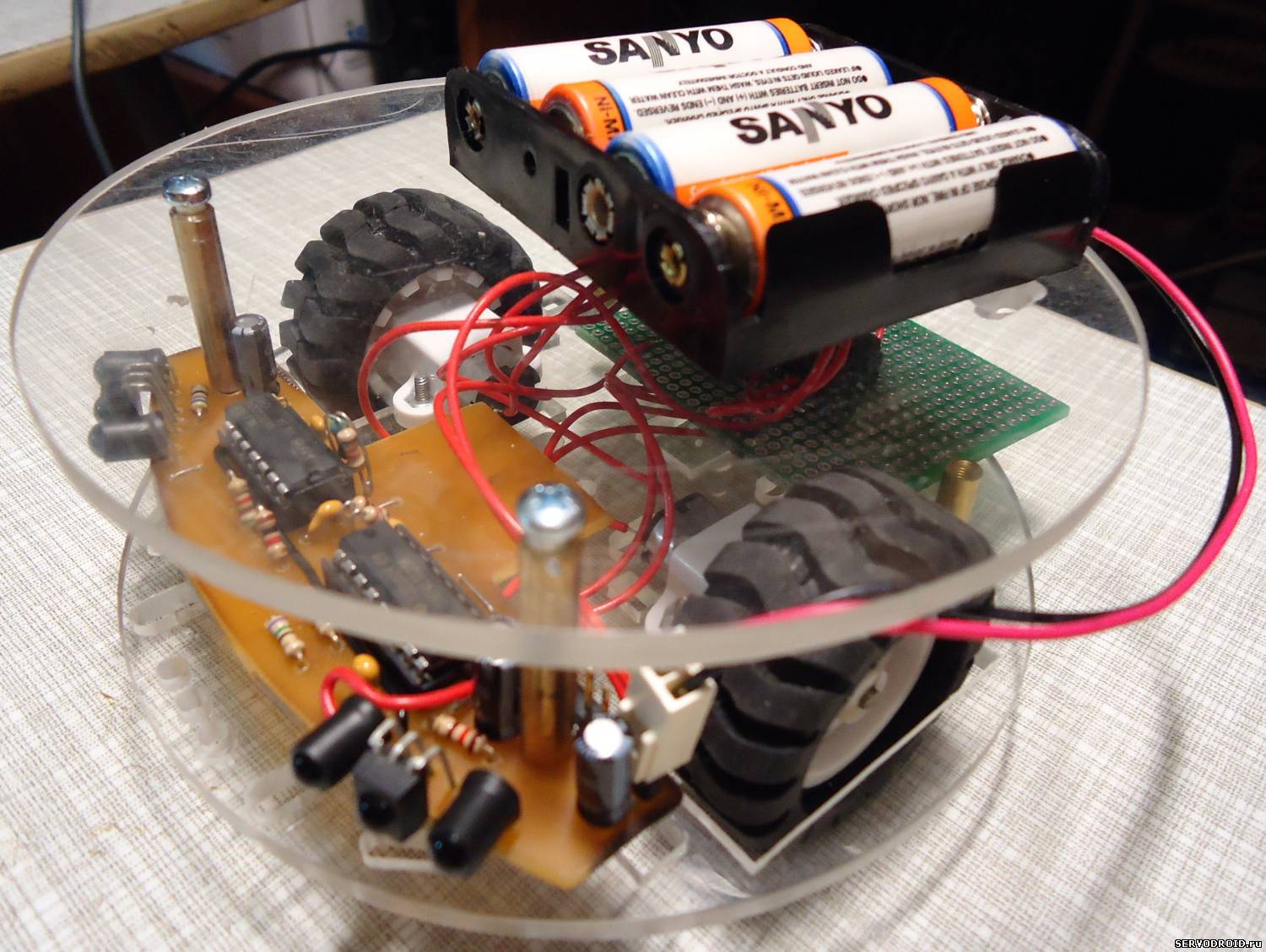
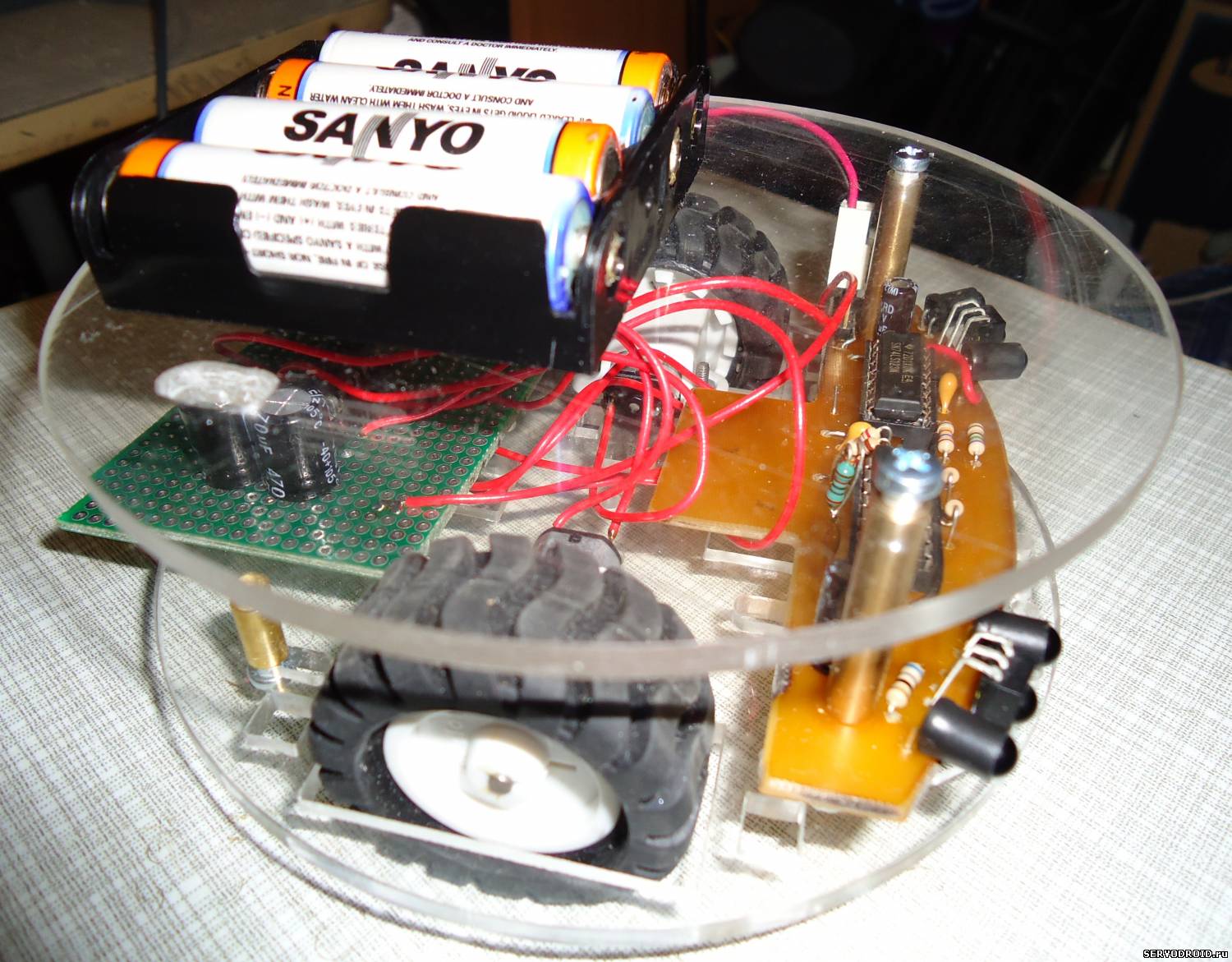
Дырок насверлить в оргстекле (это оно там, да?) и накрутить резьбу мечиком, вкрутить туда стойки, такие, на которых мат. плата компа держится и на них плату закрепить.
luxx, у владельцев почты gmail, уже есть почти готовая учётная запись на youtube, нажимаете в почте "ещё" и "YouTube", связываете две учётки и готово (или идёте на сайт YouTube и проходите регистрацию). Ищем кнопку "Добавить видео". После того как выложите видео можно будет получить его код (адрес). В сообщении пишем
S-T-A-L-K-E-R(А), спасибо, доведу до ума драйвер и обязательно выложу, только вопрос, как?
Схему можно картинкой выложить, нажав внизу кнопку "Выберите файл" при наборе сообщения или можно на фотохостинг загрузить, например на http://savepic.ru/
Добрый час, всем! Подскажите, питание на драйвер L293D нужно подавать отдельно (на двигатель и на м/с) или разницы никакой? Я просто не пробовал отдельно подавать, есть смысл, или зависит от движков?
не пробовал отдельно подавать, есть смысл, или зависит от движков?
- в общем-то да, нужно отдельно. У мс самой 5 вольт, и очень часто эти 5 вольт идут на питание моторов. Это не критично, но нужно смотреть исходя из мощьности моторов, если эти 5 вольт хватит то нормально. Через мс l293d можно подавать на моторы до 32V (вроде, см datasheet)
VS - питание двигателей (5-36В) VSS - питание микросхемы (5В) Все выводы GND соединяешь вместе и готово! + "раздельного питания" все шумы, скачки напряжения будут в цепи источника тока для двигателей; - немного усложнит конструкцию.












 (стих).
(стих).