














Для вашего удобства и удовольствия, мы внимательно разделили все наши публикации о создании роботов вручную по степени трудности. Новичкам в области робототехники мы рекомендуем начать с раздела "Роботы для начинающих", где представлены самые легкие методы создания роботов из доступных материалов. После того как вы освоите эти основы, вы можете переходить к более сложным разделам, что поможет вам на практике развивать свои знания и навыки - это обязательно пригодится в будущем! Внимательно изучайте статьи перед началом работы над роботом. В случае возникновения трудностей при сборке, не стесняйтесь обращаться за помощью на нашем "Форуме" или в нашем сообществе "ВКонтакте".
| Новые сообщения форума | ||||||||||
|
||||||||||

Уже не первый год мы, команда SERVODROID и наши коллеги из Центра робототехники 239, проводим работу по внедрению образовательной робототехники в учебных учреждениях, прежде всего в школах, с целью популяризации современных будущих профессий, так или иначе связанных с автоматизацией и робототехникой. Мы разрабатываем и внедряем задания для всероссийской олимпиады по школьной Технологии, в рамках которой есть направление "Робототехника". Учащимся предлагается пройти 3-этапа участия в олимпиаде - теоретический тур, практический тур и защита проектов. Подробнее о том, как стать организатором, или что нужно знать и уметь учащимся читайте в наших статьях!



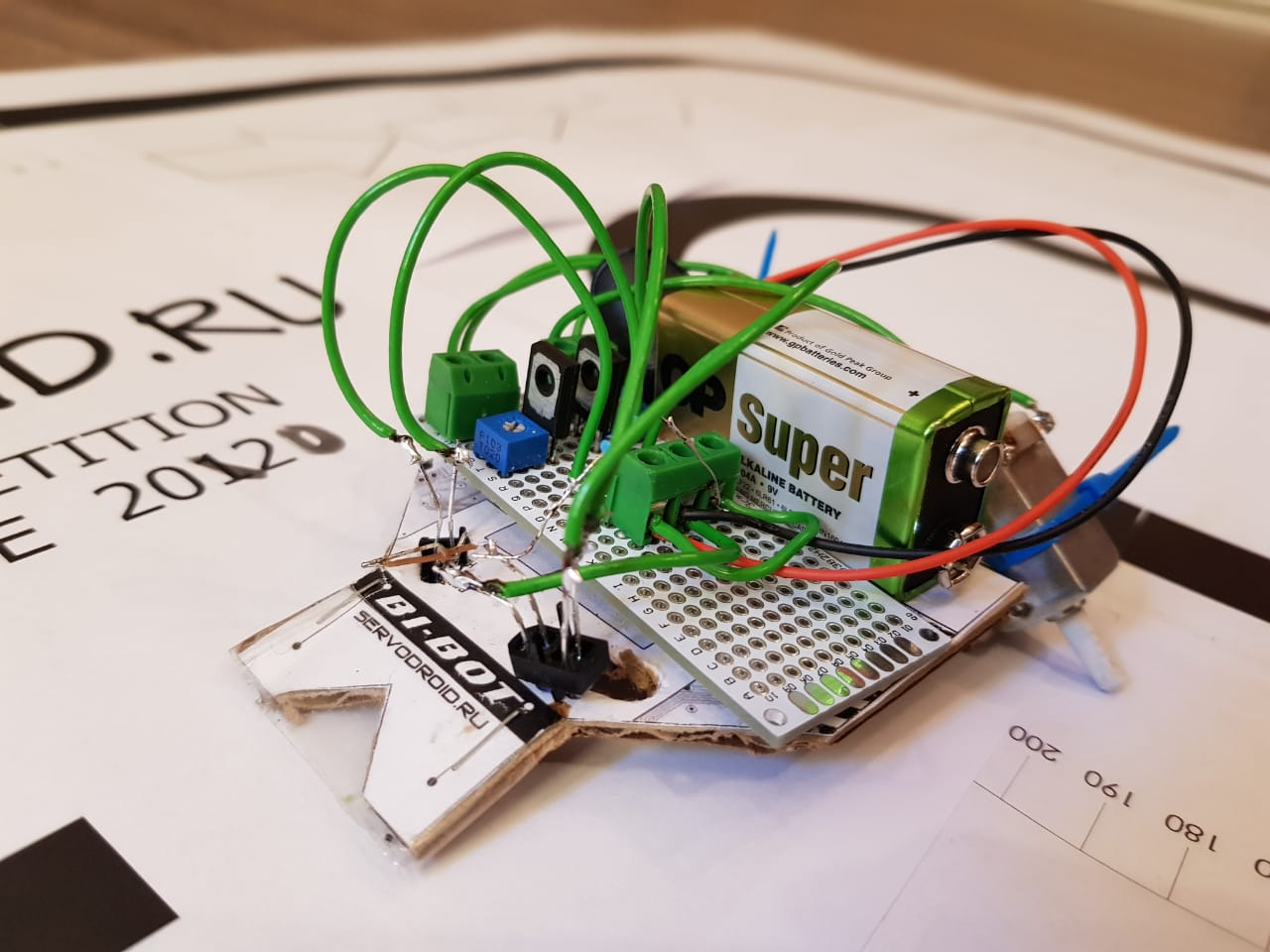
В данном разделе мы подготовили для вас подробные инструкции по сборке различных несложных роботов и платформ, которые вы без труда соберете, начиная ваше первое знакомство с миром робототехники. На примере этих простых конструкций вы попрактикуете свои конструкторские умения, отточите навыки пайки и познакомитесь с самыми основными наборами радиодеталей, которые используются при создании роботов. Узнаете хитрости монтажа, как и из чего делать корпусы роботов.


Раздел о роботах средней сложности включает в себя создание роботов с использованием печатных плат, которые вы обязательно научитесь делать, а также с использованием большего количества радиодеталей и сложных схем поведения робота. Изучите особенности различных типов релейных, пропорциональных-регуляторов. Научитесь проектировать свои печатные платы методом ЛУТ и фоторезист.


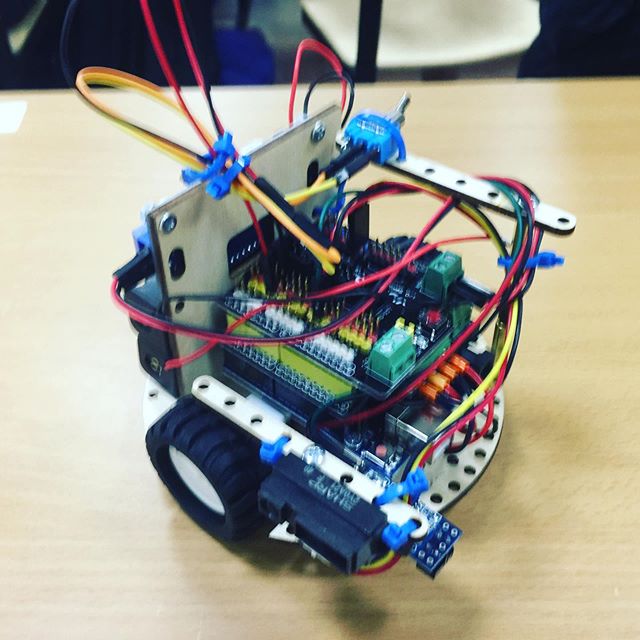
Данный раздел включает инструкции по созданию сложных, многомодульных робототехнических платформ, с использованием большого количества радиодеталей. Такие роботы имеют много функций. Алгоритмы работы сложных роботов максимально приближены к программируемым роботам, где есть регулировки скорости вращения двигателей с использованием ШИМ, калибровкой датчиков, выбором различных алгоритмов работы.


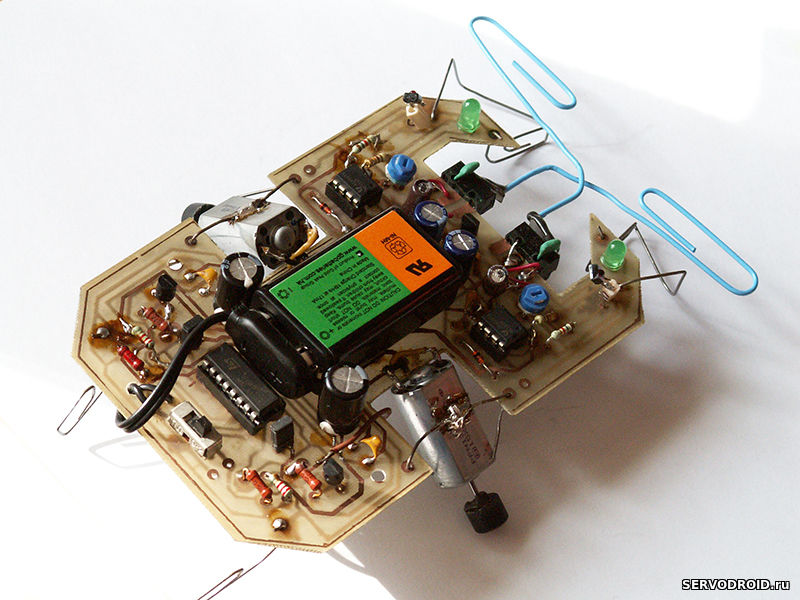
Раздел, посвященный сборке роботов для участия в популярных соревнованиях, таких как "Следование по линии", "Сумо роботов", кегельринг, лабиринт и другие виды соревнований. В разделе представлены как непрограммируемые BEAM-роботы, так и роботы с использованием микроконтроллеров и плат Arduino. Собирайте роботов и принимайте участие в соревнованиях.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Раздел посвящен созданию различных полезных приспособлений для ваших роботов, таких как регулятор скорости вращения моторов, датчики линии, датчики препятствия, датчики звука, и другие устройства, помогающие роботу лучше ориентироваться в Мире.
Живешь в Санкт-Петербурге? Хочешь научиться создавать BEAM-роботов? Подай заявку в наш кружок beam-робототехнике, который мы ведем на базе Президентского физико-математического лицея №239 г. Санкт-Петербурга. Для того, чтобы учиться в нашем бесплатном кружке, заполни заявку на сайте РобоФинист по ссылке (до заполнения нужно зарегистрироваться на сайте Робофинист), в заявке выбери учреждение ПФМЛ 239, группу кружка 262РЭ, ведущий педагог - Мельников С.А. После получения заявки с Вами свяжется преподаватель для уточнения деталей заявки. Бесплатные вакантные места в кружке ограничены, успейте подать заявку!
Есть вопросы? Педагог Мельников С.А. ответит на них по телефону: +7 (999) 270-09-14 (12:00-18:00).
Официальная группа кружка BEAM-робототехники в ВКонтакте.