В минувшие выходные, 9-10 декабря, величественный Дворец культуры имени Кирова в Санкт-Петербурге оживился захватывающим дух событием - Открытыми зимними соревнованиями по робототехнике 2023. ... Читать дальше »

С 3 по 4 декабря в рамках Открытые зимние состязания Санкт-Петербурга по робототехнике 2022 в Санкт-Петербурге состоялись соревнования по BEAM-робототехники. ... Читать дальше »
20 октября, в эти выходные, на площадке международного фестиваля по робототехнике "Робофинист" 2022 в городе Санкт-Петербург прошла, организованная нами, практическая олимпиада по Arduino. ... Читать дальше »
Уже второй год подряд нашими силами и силами наших коллег из Президентского физико-математического лицея №239 проходит организация школьной олимпиады по технологии, в рамках которой также проводится направление по робототехнике, а именно - "Программирование Arduino".
... Читать дальше »
Уже второй год подряд нашими силами и силами наших коллег из Президентского физико-математического лицея №239 проходит организация школьной олимпиады по технологии, в рамках которой также проводится направление по робототехнике, а именно - "Программирование Arduino".
... Читать дальше »
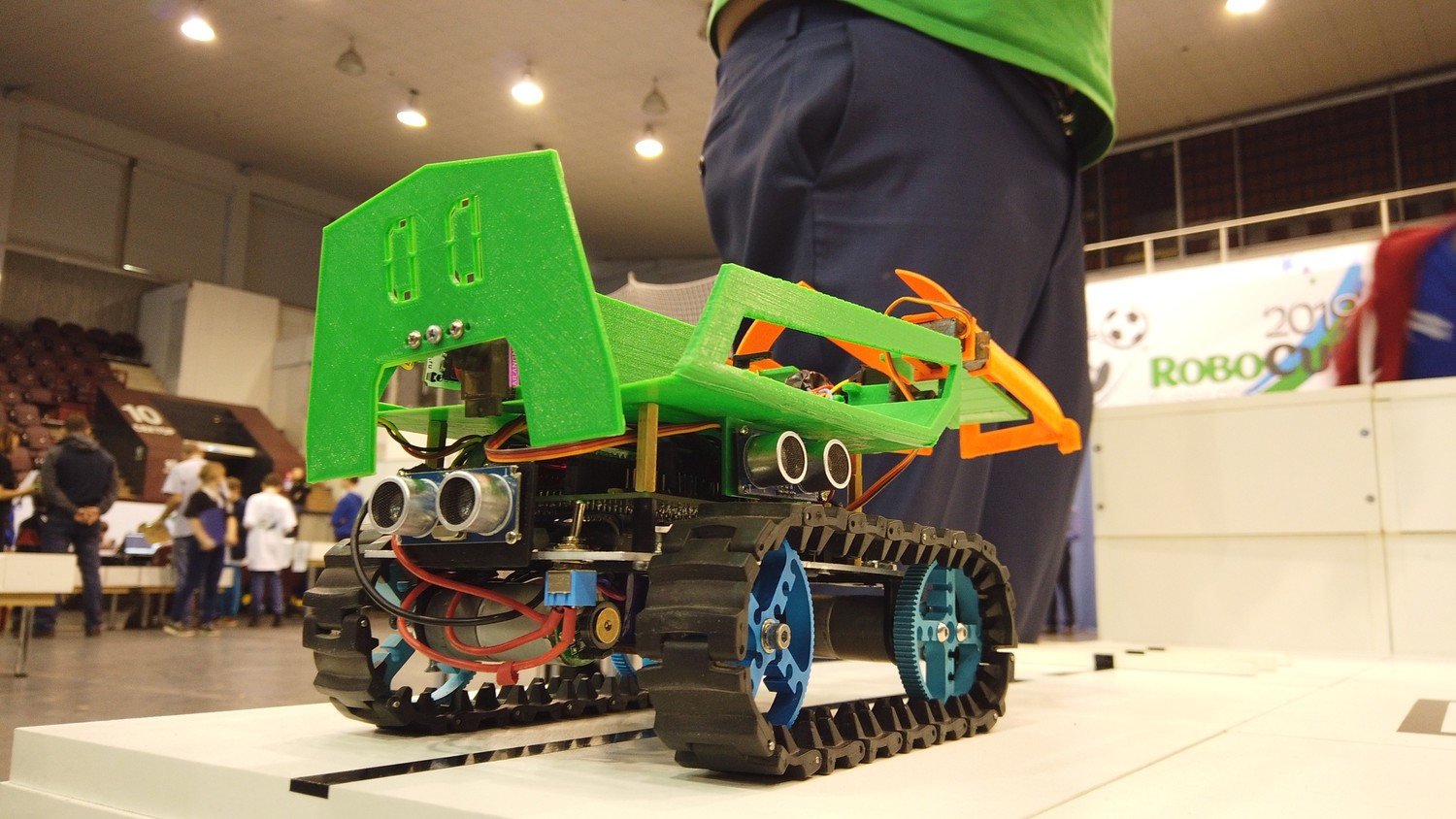
26-28 апреля в Томске прошли соревнования RoboCup Russia Open 2019 в котором участвовали наши ученики из Центра робототехники Президентского физико-математического лицея №239.
К мероприятию ребята готовились задолго до начала мероприятия - с сентября 2018 года! Да, это достаточно сильные и престижные соревнования, к которым нужно готовиться с головой и продумывать всякие мелочи, вплоть до вариантов поломок и ситуаций, как это все исправлять на месте. ... Читать дальше »
В этот вторник, 9 апреля в Президентском физико-математическом лицее № 239, г. Санкт-Петербург, мы провели Заключительный этап всероссийской олимпиады по Arduino (по технологии) в направлении "Робототехника". ... Читать дальше »

10 февраля в Губернаторском физико-математическом лицее №30 состоялись шестые Инженерные робототехнические соревнования «Полигон ФМЛ30». Как и в прошлые годы, состязания для робототехников проходили по двум направлениям: на базе платформы Lego Mindstorms и на базе платформы Arduino. Задания были выданы участникам с утра в день соревнований. У команд была возможность собирать и программировать свое устройство только на площадке без помощи со стороны наставников и родителей. ... Читать дальше »
В конце января, текущего года в школах Санкт-Петербурга, и должно быть в других школах по всей России проводятся олимпиады по направлению "технология", в рамках которой также проводится направление "Робототехника: Arduino", где ребятам предлагают принять участие и заработать дополнительные (полезные) баллы по обучению, которые в дальнейшем помогут им с вступлением в ведущие ВУЗы по соответствующим направлениям. ... Читать дальше »

В этом году в Санкт-Петербурге проводился крупный конкурс, с призовым фондом в 1 000 000 долл... экхм, рублей, конечно. Конкурс называется Международный конкурс детских инженерных команд 2018 #ICET2018!
... Читать дальше »