Подписывайся на наш Телеграм канал, задавай вопросы по роботам, делись своими схемами,
помогай другим собирать роботов и набирайся опыта!
t.me/servodroid
Робот-следопыт обладает очень высокой чувствительностью к свету. Он способен обнаружить и передвигаться вслед за световым пятном. Робот будет передвигаться за световым пятном на полу от яркого луча света оставляемого фонариком. Для уверенного управления роботом достаточно просто посветить фонариком перед ним на некотором расстоянии. Смещение светового пятна вправо от робота вызовет поворот вправо, а смещение светового пятна влево соответственно вызовет поворот влево. Чем ближе световое пятно к роботу, тем быстрее он будет передвигаться и чем дальше, тем медленнее его передвижение по поверхности. $CUT$
Управлять роботом не так просто, на большой скорости, при резких поворотах он может выйти из равновесия и упасть. Устанавливать разные уровни скорости перемещения робота можно с помощью расположенного на его корпусе регулятора скорости. Изменяя регулятором скорость передвижения по поверхности, можно задавать разные уровни сложности управления роботом.
***
1.ВИДЕОТЕСТЫ.
На приведённых видеофрагментах (плейлист в проигрывателе) последовательно показано управление роботом с помощью луча света от фонаря на максимальной и пониженной скоростях. Чем дальше световое пятно от робота тем скорость передвижения ниже, чем ближе световое пятно к роботу тем скорость передвижения по поверхности выше.
Через панель навигации видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель навигации доступна после запуска видео, справа внизу значок пиктограммы. Перед запуском каждого видеофрагмента автоматически выводится его название в верхнем левом углу. В нижней части окна проигрывателя слева название плейлиста и количество сгруппированных видеофрагментов.
На видео.1. показано управление роботом на максимальной скорости с помощью светового пятна от фонарика.
На видео.2. показано управление роботом на пониженной скорости с помощью светового пятна от фонарика.
После включения питания робот будет оставаться в неподвижном состоянии. Если перед роботом (на пол) посветить фонариком, робот придёт в движение и будет быстро передвигаться за световым "зайчиком" на полу. Высокая чувствительность к источнику света намного облегчает управление световым лучом, потому что светить можно с большего расстояния "не прицеливаясь" на фотоэлементы.
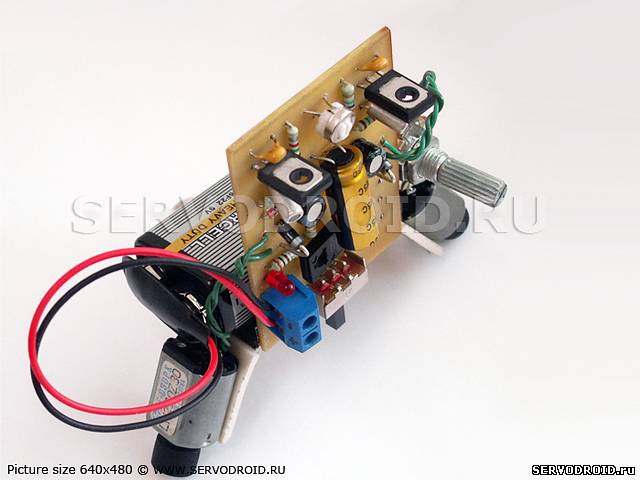
На фото.1 и фото.2 показан робот следопыт в сборке. обратит внимание на компоновку. Робот имеет не горизонтальную, а вертикальную форму. Моторы расположены под углом. Батарейка не только питает всю схему, но и является центром тяжести всей конструкции и удерживает её в равновесии, придаёт большей устойчивости. К особенностям в конструкции также следует отнести обратный монтаж переменного резистора. То есть его выводы запаивают со стороны токоведущих дорожек.
нажимайте фото для просмотра в полном размере
фото.1
фото.2
К недостаткам данного робота следует отнести: источник питания (9В), который не рассчитан на большие токи потребления (более 20мА). Поэтому для продления его срока службы рекомендуется увернуть регулятор скорости передвижения ближе к минимуму.
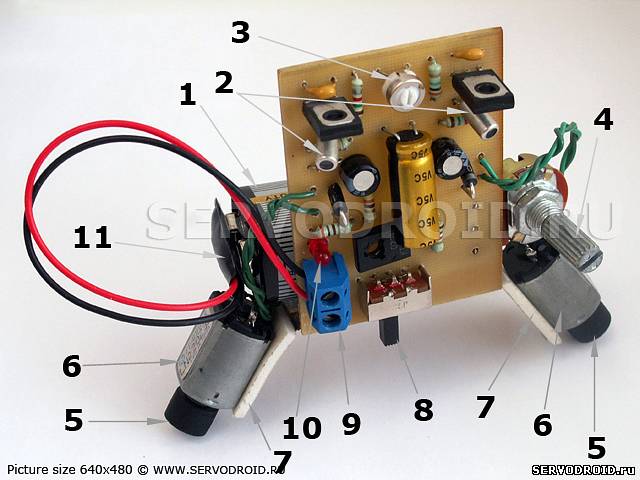
Основные элементы и их функциональное назначение показано на фото.3. Расшифровка позиций даётся ниже.
Подстрочный резистор (3) регулирует дифференциальную чувствительность фототранзисторов. С его помощью можно устранить разницу между чувствительность одного и другого фототранзистора (выравнять).
Резистор переменного сопротивления (4) регулирует ток протекающий через оба мотора. С его помощью можно установить скорость передвижения робота по поверхности. Но необходимо учесть, что чем выше скорость , тем больше расходуется батарейка.
Мигающий светодиод (10) служит индикатором включения источника питания. светодиод начинает мигать сразу как только будет включен источник питания. Возможна замена мигающего светодиода на светодиод постоянного свечения, но ток потребления в этом случае возрастает значительно.
КОМПОНЕНТЫ КОНСТРУКЦИИ РОБОТА
1.Источник питания батарея 6f22 напряжением 9 В.
2.Фототранзисторы ФТ2К.
3.Дифференциальный регулятор (подстр. резистор).
4.Регулятор скорости (перем. резистор).
5.Протекторы (ролики резиновые).
6.Моторы низковольтные FF-030PK.
7.Скотч двусторонний.
8.Микровыключатель питания.
9.Клеммник винтовой.
10.Индикатор питания (мигающий светодиод).
11.Клип-разъём для подключения батареи 9В.
Примечание.1. Устанавливать винтовой клеммник необязательно, достаточно припаять выводы клип-разъёма к соответствующим позициям на печатной плате.
фото.3.нажимайте фото для просмотра в полном размере
3.ПРИНЦИП РАБОТЫ.
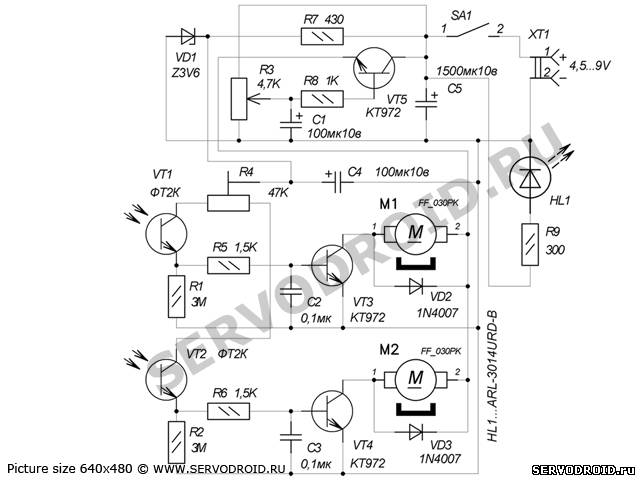
Электрическая схема представлена на рис.1. Она состоит из двух идентичных усилителей постоянного тока, стабилизатора напряжения, индикатора питания и регулятора тока для моторов. После включения напряжение питания 9 вольт поступает на стабилизатор напряжения R7VD1C4. С его выхода напряжение, ограниченное уровнем 3,6 вольта подаётся на дифференциальный регулятор, выполненный на подстроечным резисторе R4. Он необходим при установке равной чувствительности к свету для фототранзисторов VT1,VT2.
Рис.1.Электрическая схема . Нажимайте рисунок для увеличения.
Одновременно напряжение питания поступает на регулятор тока, выполненный на составном транзисторе VT5. Резистором R3 устанавливают напряжение смещения на базовом выводе транзистора VT5, что приводит к изменению сопротивления перехода эмиттер-коллектор. В результате синхронно изменяется ток, протекающий через транзистор VT5 и, следовательно, частота вращения валов у моторов M1,M2 при открытых транзисторах VT3,VT4.
Фототранзисторы VT1VT2 включены последовательно с резисторами R1R2 иобразуют два одинаковых делителя напряжения. Сопротивления резисторов выбраны большими, чтобы обеспечить максимальную чувствительность фототранзисторов к свету.Пока фототранзисторы VT1VT2 не освещены на эмиттерах отрицательный потенциал. Этот потенциал через токоограничительные резисторы R5R6 закрывает транзисторы VT3VT4. В результате этого моторы оказываются выключенными.
Допустим, свет попадает на фототранзистор VT1, тогда сопротивление его перехода эмиттер-коллектор уменьшается и на эмиттере появляется положительный потенциал. Через резистор R5 он быстро заряжает конденсатор C2 и открывает транзистор VT3. Мотор M1 включается. При затененном фототранзисторе конденсатор C2 разряжается. Таким образом, конденсатор позволяет сделать повороты плавными без дёрганий.Аналогично работает второй канал усиления на фототранзисторе VT2 и составном транзисторе VT4.Диоды VD2,VD3 гасят индукцию моторов M1M2. Светодиод HL1-индикатор включения питания. Он выбран мигающим с красным цветом свечения, так как этот режим работы более предпочтителен с экономической точки зрения.
4.ДЕТАЛИ И МАТЕРИАЛЫ.
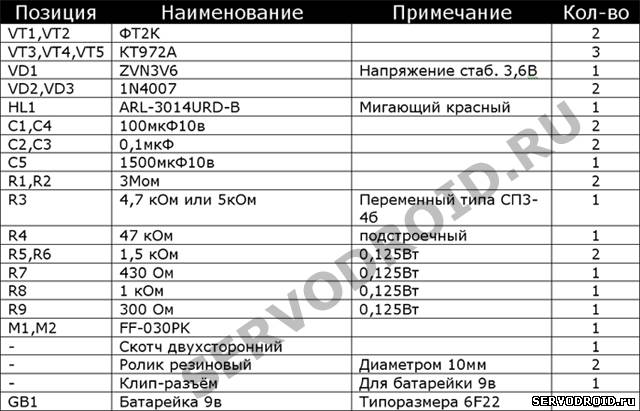
Печатная плата изготовлена из односторонне фольгированного листа стеклотекстолита толщиной 1-1,5мм. Размеры печатной платы 40х55мм. Ссылка на архив с чертежами и разводкой под ЛУТ генератора размещена в конце статьи. Список радиокомпонентов приведён в таблице.1.
Таблица.1.Список радиокомпонентов.
Примечание.2.Резисторы R1,R2 можно установить и с более низким сопротивлением, например 1,5-2Мом.
Примечание.3.В модели робота можно устанавливать следующие типы двигателей: FF-030PK, RF-300CH (шайбообразные), PPN13LB11C а также отечественные ДП39-0,1-2. Возможно также использование других типов двигателей рассчитанных на низкое рабочее напряжение до 4,5 вольт.
5.ИНСТРУКЦИЯ ПО СБОРКЕ.
Для правильной сборки придерживайтесь инструкций по сборке. Редактировать, масштабировать чертежи в архиве нельзя, так как все чертежи архива в точных размерах.
1.Изготовление печатной платы.
Подготовьте односторонний лист стеклотекстолита толщиной 1-1,5мм и размерами 40x55мм. Предварительно зачистите фольгированную поверхность стеклотекстолита, промойте и высушите. Выполняйте перевод по известной методике ЛУТ, рисунка токоведущих дорожек. Проведите травление в растворе и промывку печатной платы.
После изготовления печатной платы выполните лужение токоведущих дорожек.
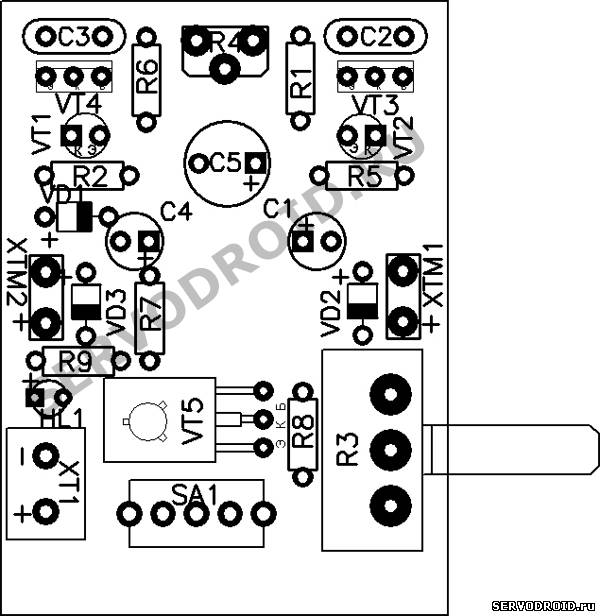
2.Монтаж радиокомпонентов.
На первом этапе выполните монтаж всех радиокомпонентов выполняйте по монтажному чертежу приведённому на рис.2. Порядок монтажа следующий: резисторы, конденсаторы, транзисторы, светодиоды, выключатели питания, моторы.
ТРАНЗИСТОРЫ: При монтаже транзисторов VT3,VT4 установите их в вертикальную позицию, а транзистор VT5 установите горизонтально. Выключатель питания SA1 должен быть с горизонтальной установкой.
РЕЗИСТОР ПЕРЕМЕННОГО СОПРОТИВЛЕНИЯ: Переменный резистор R3 монтируют нестандартно со стороны токоведущих дорожек с подкладкой изоляционной ленты. Такой способ монтажа продиктован условием нормального угла обзора фототранзисторами. При общепринятом монтаже переменный резистор прикрывал бы часть отражённого от пола светового потока. Перед установкой переменного резистора обязательно изолируйте часть токоведущей дорожки во избежание замыканий выводами резистора.
ФОТОТРАНЗИСТОРЫ: Фототранзисторы должны быть ориентированы под углом 45° вниз и разведены в стороны под углом около 30°. Эти условия необязательно соблюсти точно, но для получения высокой чувствительности к свету они необходимы. Выполнять ориентацию фототранзисторов лучше сразу во время монтажа.
Фото.4.Нажимайте рисунок для увеличения.
3.Изготовление силовой рамы.
Для установки моторов необходимо изготовить силовую раму (рис.3), имеющую специальную конфигурацию. В качестве материала наиболее подходит банка из-под кофе.
ВНИМАНИЕ! При неосторожных движениях, вы можете порезать тонкой жестью руки, будьте осторожны!
Лучшим вариантом замены жести является нарезанные на части (по чертежу рис.3) и спаянные между собой куски фольгированного стеклотекстолита.
Сначала отрежьте прямоугольник со сторонами 80х20мм, а затем по приведённому чертежу выполните фигурную обработку ножницами. Делать это следует очень осторожно, так как тонкая жесть может легко поранить при невнимательном отношении. В дальнейшем острые края обрезают, а после пайки к поверхности платы они будут закрыты двухсторонним скотчем. В качестве материала также можно рекомендовать фольгированный стеклотекстолит, но изготовление из него силовой рамы потребует большего времени.
После изготовления фигурной формы изображённой на чертеже по пунктирным линиям проводят загиб. По линии "A” под углом 90°, по линиям "B” и "C” под углом 45°. Поверхность 1 заслуживают с двух сторон. Именно эту поверхность нужно припаять к участку сплошного покрытия на поверхности печатной платы. Участок сплошного покрытия на печатной плате необходимо предварительно залудить. На фото.5. показана правильно изготовленная силовая рама.
нажимайте фото для просмотра в полном размере
Рис.3.
Фото.5.
4.Монтаж третей точки опоры.
Когда силовая рама будет надёжно припаяна к плате, изготовьте третью точку опоры. Для этого возьмите канцелярскую скрепку и бусинку. В бусинке просверлите отверстие диаметром около 1,5 мм. Наживите бусинку на выгнутую скрепку. Изогните скрепку как показано на фотографиях.
Припаяйте готовое шасси к задней части поверхности силовой рамы. Устойчивости конструкции, регулируя угол наклона заднего шасси добиваться не нужно. Конструкция приобретает устойчивость сразу после установки батареи, которая является противовесом. Области пайки и лужения (1) показаны на фото.7.
нажимайте фото для просмотра в полном размере
Фото.6.
Фото.7.
5.Монтаж моторов.
На фото.8 под цифрой 1 показаны области пайки, под цифрой 2 позиция укладки двустороннего строительного скотча. Моторы крепят на крылья силовой рамы.
Фото.8.Нажимайте фото для увеличения.
Далее установите на поверхности 2 и 3 кусочки двухстороннего скотча. Для этого вам потребуется двухсторонний скотч размерами 19х1,5мм. Скотч не только закроет острые края, но и одновременно будет сцеплять двигатели с поверхностью рамы. После ориентации двигатели следует плотно прижать к скотчу.
Не рекомендуется многократно переустанавливать двигатели, отрывая их от скотча - это приведёт к потери клейкости его поверхности и к значительному ослаблению крепежа. Если крепление вам покажется не достаточно надёжным дополнительно зафиксируйте моторы изоляционной лентой или пластмассовыми хомутиками с защёлкой. Для обеспечения сцепления с поверхностью на валы обоих моторов надевают резиновые ролики с внешним диаметром 10мм.
6.Установка и крепление батарейки.
Батарейку разместите горизонтально сзади на силовой раме (фото.9). Чтобы батарейка не соскальзывала нужно на позицию (место размещения) прикрепить двусторонний скотч или закрепить её хомутиком.
нажимайте фото для просмотра в полном размере
Фото.9.
Фото.10.
После установки батарейки подключите её через клип-разъём к печатной плате (фото.10). Затем проведите предварительную настройку по приведённым далее рекомендациям.
6.НАСТРОЙКА.
Настройка робота не сложна. Установите батарею 6F22 и подключите её через клип-разъём. Движок подстроечного резистора R4 установите в среднее положение. Включите питание SA1. Светодиод HL1 должен вспыхивать, сигнализируя о включении питания. Посветите фонариком или настольной лампой на фототранзисторы VT1VT2. Если робот едет назад или вращается на месте необходимо поменять полярность подключения соответствующих моторов. Если робот двигается по кругу, нужно отрегулировать чувствительность фототранзисторов с помощью подстроечного резистора R4. Если же один или оба мотора не работают, ищите ошибки в монтаже на печатной плате.
Ток потребления при закрытых транзисторах VT3,VT4 составляет около 20мА. При открытых транзисторах до 100мА. Так же необходимо учитывать, что ток потребления будет зависть от положения переменного резистора R3. Если будет установлена максимальная скорость передвижения робота с помощью переменного резистора R3, ток потребления тоже будет максимальным. Сборка окончена!
В архиве к следопыту: в папке чертёж термоклише в точных размерах. Преобразовывать и редактировать чертежи нельзя! После скачивания распечатайте чертежи на лазерном принтере. Термоклише распечатайте на глянцевой бумаге. Используйте термоклише для перевода рисунка на стеклотекстолит по методу ЛУТ.
Скачать архив Методика изготовления печатной платы методом ЛУТ.
Скачать архив Архив к роботу следопыту с чертежами, пароль не требуется. Размер архива 100kb
я поставил фт1к, реакции двигателей никакой, тут почитал что эти фототранзисторы предназначены для работы в качестве детектора инфракрасного излучения в радиоэлектронной аппаратуре промышленного и специального назначения, завтра буду пробовать..... ну или как подсказали знающие люди-нужно делать каскадный усилитель.....
У любого источника света есть ИК-излучение, только у фт свой порог чувствительности, который указывается в датащите. Если нет отечественных - ставьте аналоги любые импортные - тоже подойдут.
сегодня разобрал мышь старую, шариковую, взял оттуда два ИК-датчика, у них три ноги, выяснил что средняя "+", как подключить остальные две? Пробовал поставить, подключить, сначала была реакция на свет, затем реагировать перестал....
Не стоит путать фотоДиоды с фотоТранзисторами! Хотя они и выполняют одинаковую задачу - реакция на свет, но они работают и вырабатывают сигналы каждый по своему. Тот что с 3-мя лапками - это фотоДиод. Средняя вход - крайние - выходы. Это сдвоенный фотодиод, в нем два фотодиода Не советуем его использовать в этой конструкции. Работать может но плохо. Или только при ярком свете, например при солнце.
Здравствуйте. Можете подсказать, как разместить на схеме фототранзистор с тремя выводами
Ответ: Здравствуйте. Фототранзистор из мышки какой-нибудь? Обычно у сдвоенных фототранзисторов средня ножка - общая, а крайние разделены на фото 1 и фото 2 транзисторы. Подключаете или тот или другой
Скачать архив Методика изготовления печатной платы методом ЛУТ. Скачать архив Архив к роботу следопыту с чертежами, пароль не требуется. Размер архива 100kb Нет страниц с архивами!












 Не советуем его использовать в этой конструкции. Работать может но плохо. Или только при ярком свете, например при солнце.
Не советуем его использовать в этой конструкции. Работать может но плохо. Или только при ярком свете, например при солнце.

