Робототехника стала достаточно популярным направлением - в большинстве школ начали появляться кружки и секции робототехники Lego, также стали появляется дополнительное направление в кружках робототехники, например Arduino. И что, скажете вы? ... Читать дальше »

МЕХАНИЧЕСКИЙ ТАРАКАН – это конструкция, которая весьма популярна среди любителей мастерить своими руками. Такие механические тараканы - прекрасный способ вызвать интерес к творчеству среди подрастающего поколения.
Его походка очень схожа с настоящим тараканом. При ходьбе немного раскачивается шагая уверенно вперед. Таракан имеет минимум сложных деталей и очень прост в изготовлении.
... Читать дальше »
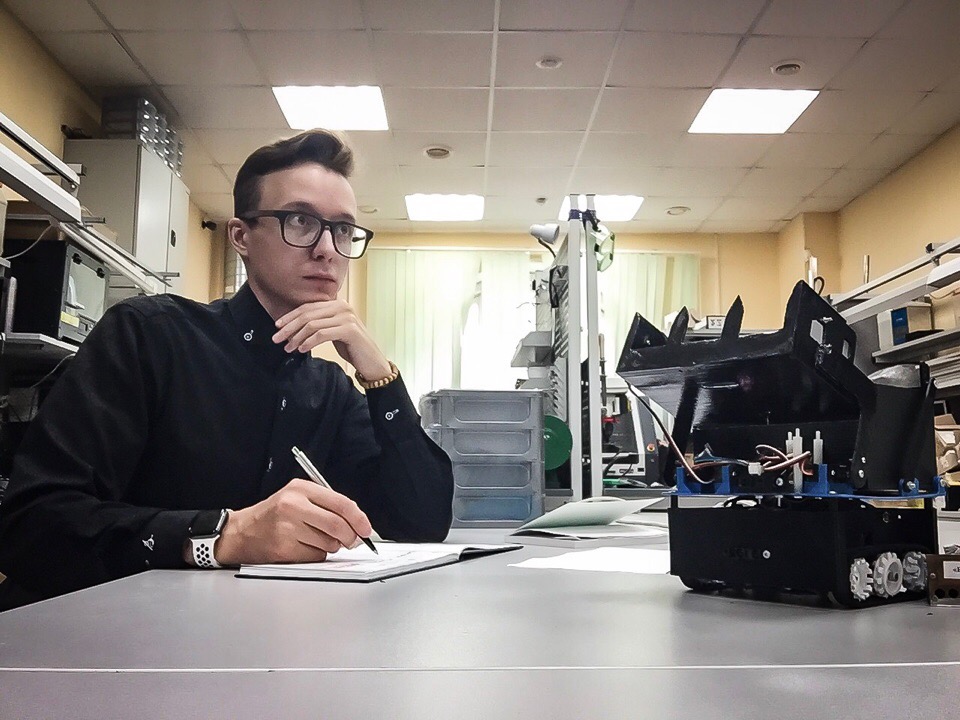
Сергей Мельников (проект SERVODROID): Я считаю идеальным, когда у всех участников роботы работают так, как и были запрограммированы. ... Читать дальше »
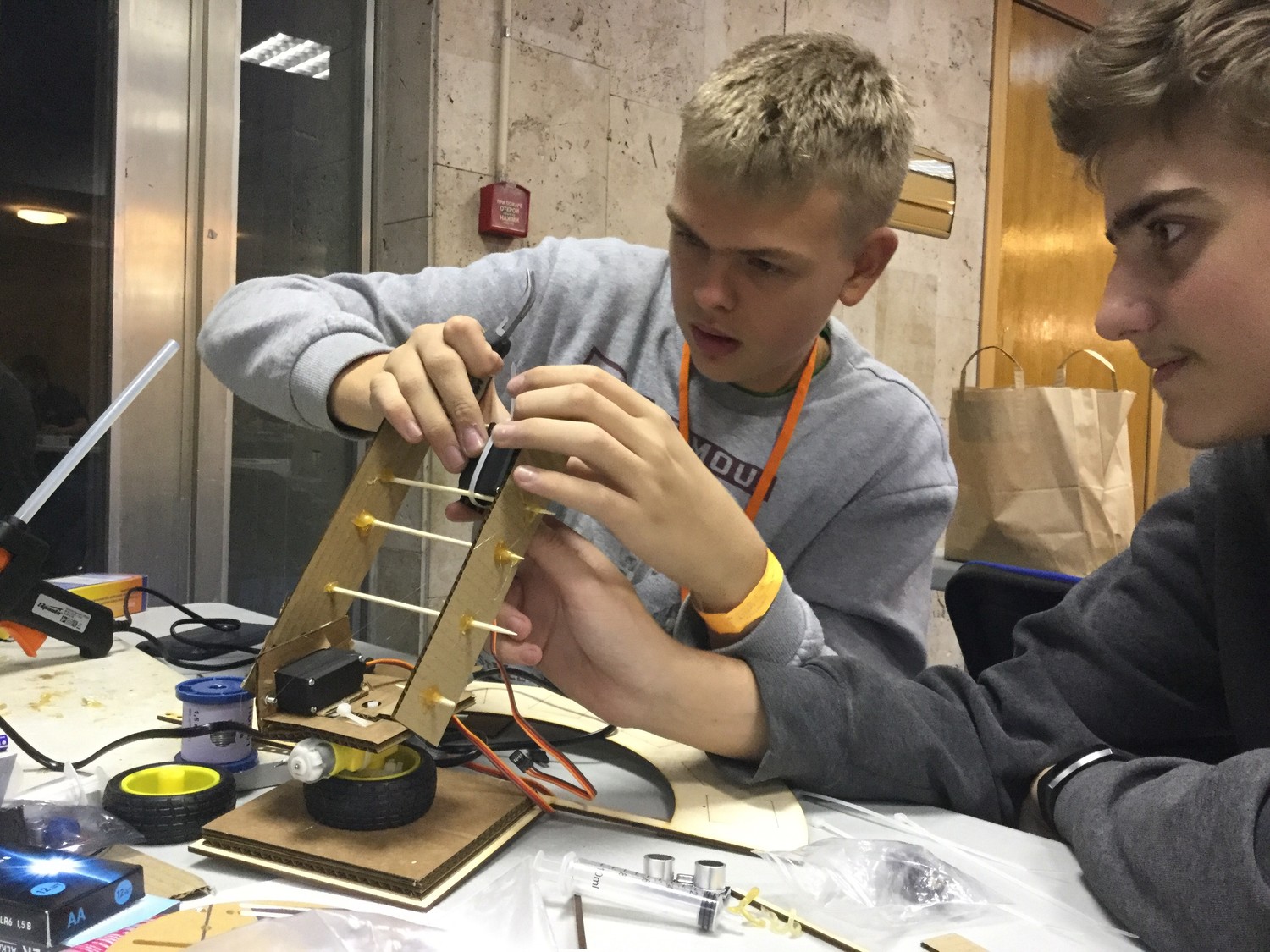
В эти выходные, 6 октября 2018 г. в Петербургском спортивном концертном комплексе "СКК" прошла Практическая олимпиада по Arduino, в которой участники из различных городов России боролись за звания лучших. ... Читать дальше »

Добрый день, меня зовут Сергей. Я руководитель образовательного проекта "SERVODROID". Наш проект занимается разработкой простых в повторении роботов для детей и взрослых. ... Читать дальше »

Мастер-класс по сборке муравьев-роботов состоялся в Заполярном на фестивале научных открытий Arctic Wave, организованном «Норникелем».
... Читать дальше »
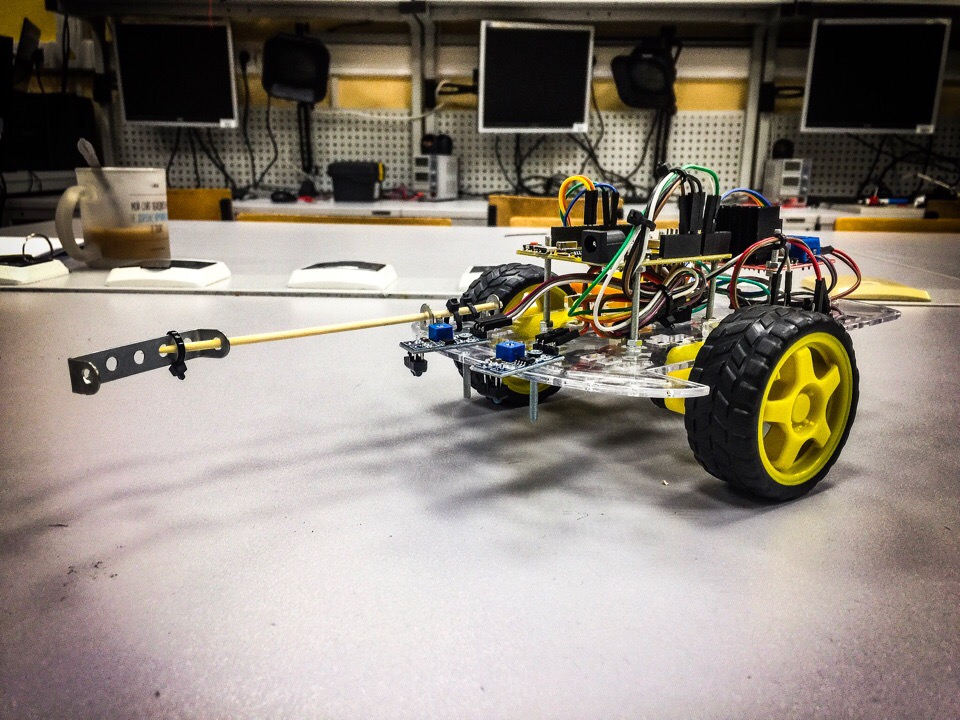
LINEBOT Atmega8 - робот трейсер на микроконтроллере. Использование микроконтроллеров в робототехнике уже повсеместное явление. Такие роботы более функциональны и технологичны, обладают большими возможностями и, более гибки в настройках. Представляем робот для прохождения трассы, на микроконтроллере atmega8. Проект включает чертежи электрических и печатных плат, описание принципов работы.
... Читать дальше »

SYBUG - кибернетический жук, представляет собой подобие биологического жука. Он выполнен в виде кибернетической модели и способен взаимодействовать с окружающей средой с помощью внешних датчиков, рефлексивного поведения. Для создания миниэкосистемы, была также разработана и изготовлена зарядная ... Читать дальше »

СИНУСОИД - экспериментальный одномоторный робот. Идея сборки этого робота возникла давно, стандартная модель робота использует для передвижения от двух моторов и более. Но почему бы не попробовать задействовать только один мотор, для движения за источником света. ... Читать дальше »

ДВУХКАНАЛЬНЫЙ РЕВЕРСИВНЫЙ ДРАЙВЕР управления моторами, предназначен для полного управления двумя моторами с использованием шим-модуляции или без неё с помощью микроконтроллера или отладочной платы. Драйвер выполнен по симметричной двухканальной схеме с цифровым управлением. Он позволяет изменять направление вращения оси для двух моторов независимо, изменять скорость вращения в любом направлении с помощь шим-модуляции.
... Читать дальше »