16:40 Робот Таракан | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 МЕХАНИЧЕСКИЙ ТАРАКАН – это конструкция, которая весьма популярна среди любителей мастерить своими руками. Такие механические тараканы - прекрасный способ вызвать интерес к творчеству среди подрастающего поколения. Его походка очень схожа с настоящим тараканом. При ходьбе немного раскачивается шагая уверенно вперед. Таракан имеет минимум сложных деталей и очень прост в изготовлении. ***
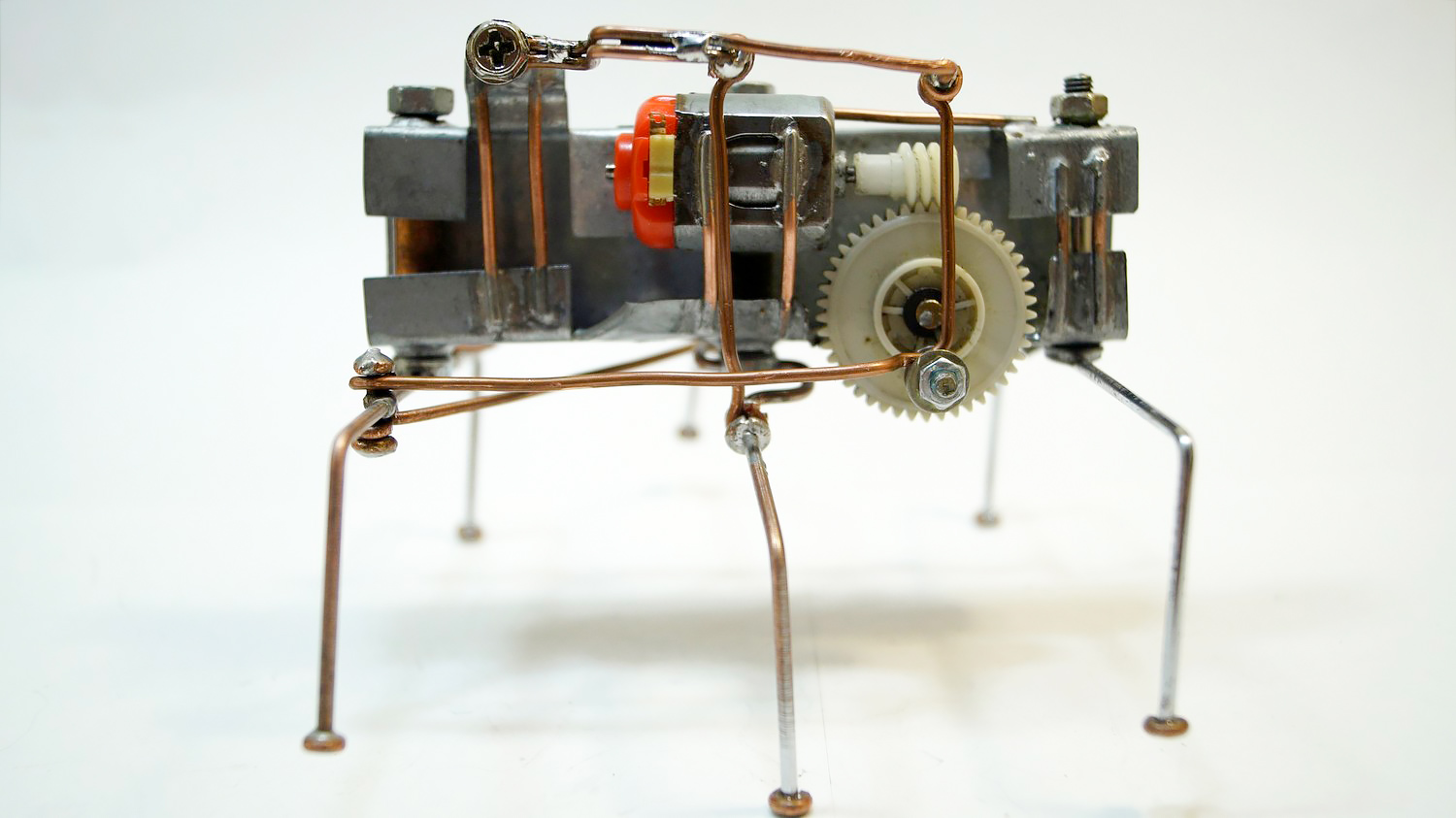
На видео 1. показан механический таракан с разных ракурсов во время его работы при передвижении.
Видеофрагмент 1
нажимайте фото для просмотра в полном размере.
КОНСТРУКЦИЯ РОБОТА. В качестве рамы использован профиль ппн-2 30Х20. Крепление двигателя и других соединений проведено с помощью пайки. Лапы таракана крепятся болтами М6. Кнопка включения и отсек для батареек приклеены на двухсторонний скотч. В качестве тяги для привода лап таракана использован медный кабель сечением 2,5мм
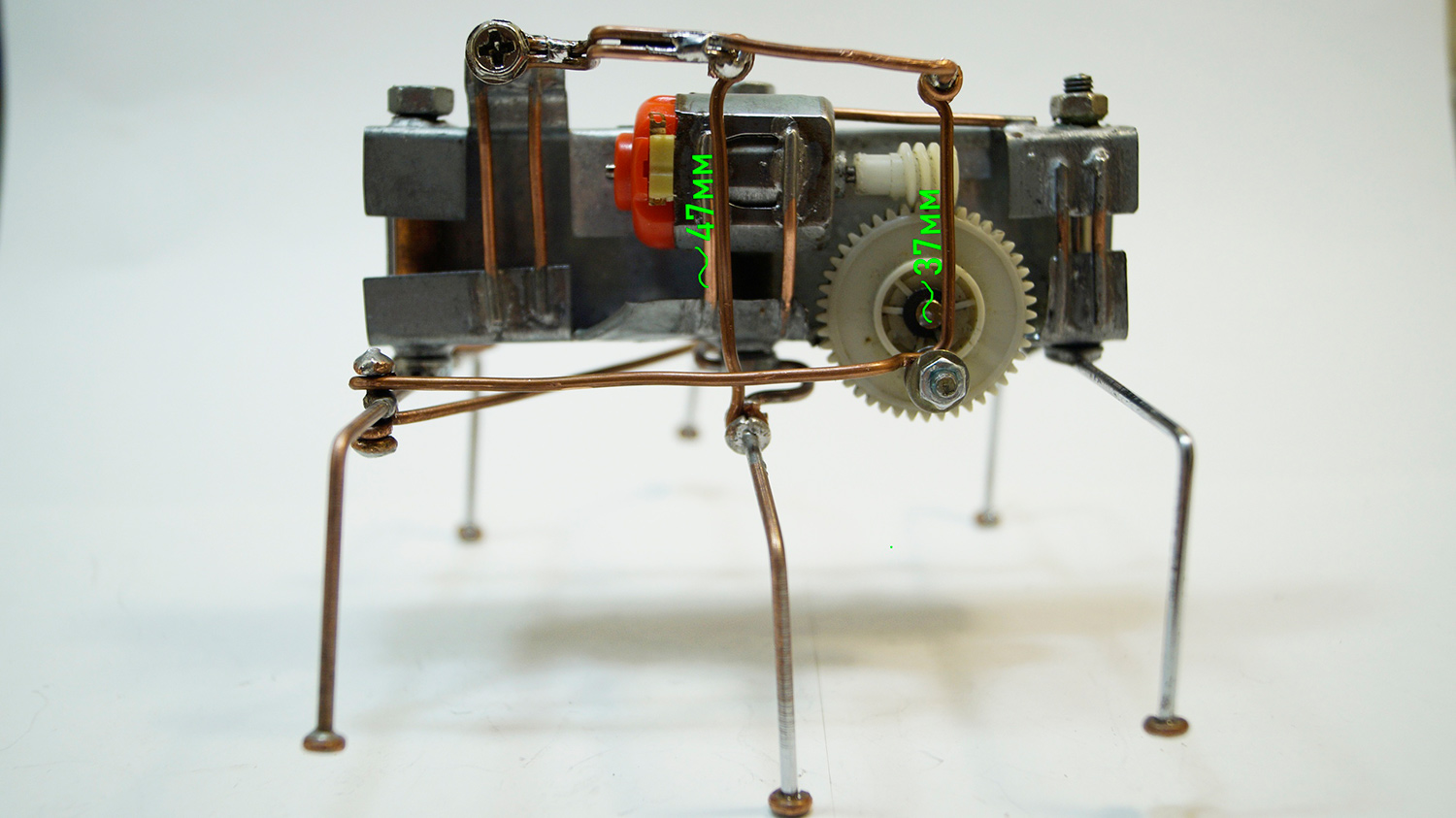
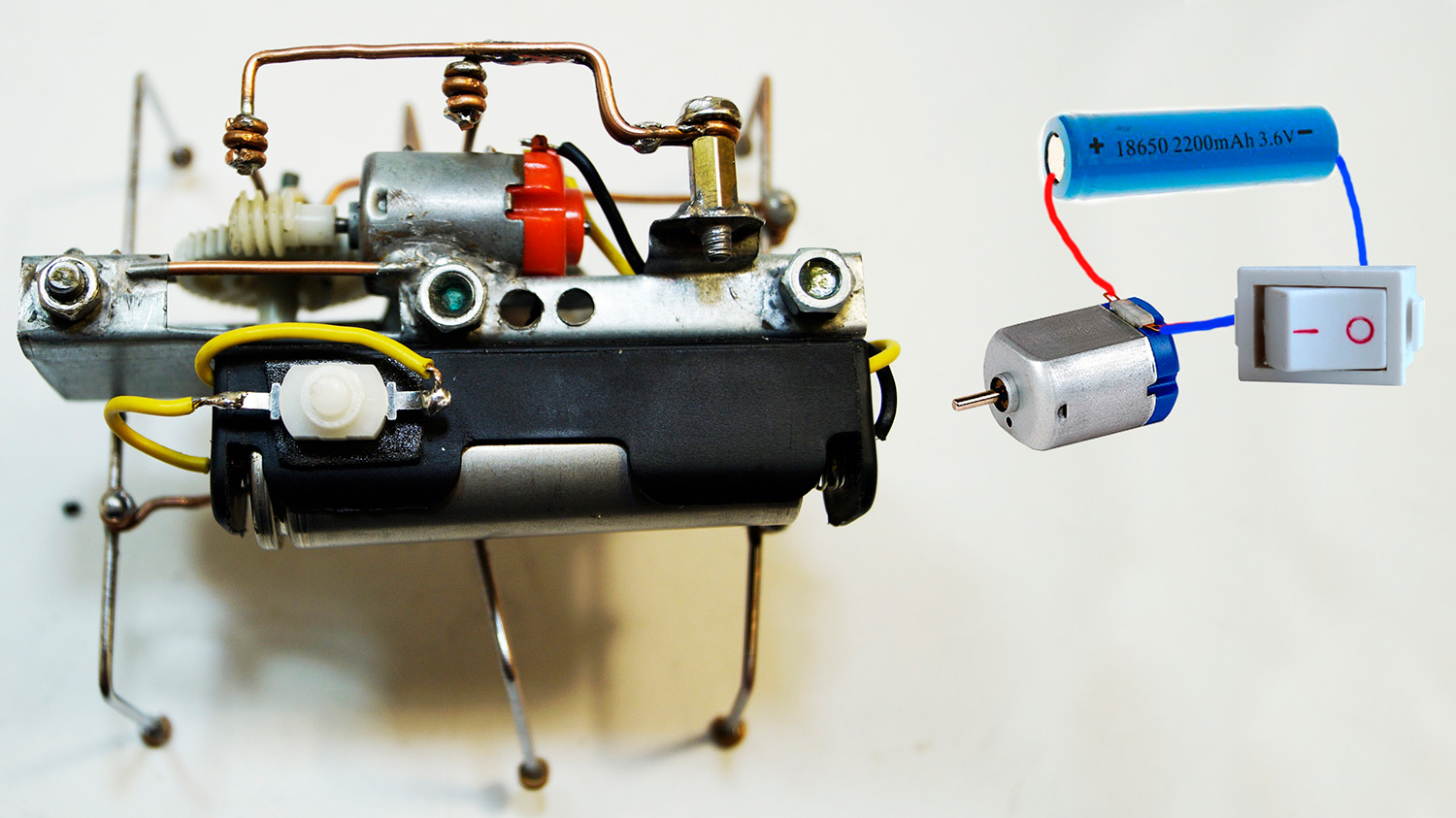
Моторчик и ось кривошипа припаяны к раме на ПОС-61, паяльная кислота ZnCl (Хлористый цинк). Для увеличения крутящего момента и уменьшения габаритов, была использована червячная передача. В качестве источника питания робота был использован аккумулятор 18650. Напряжение аккумулятора 3,7 вольта.
фото.3
фото.4
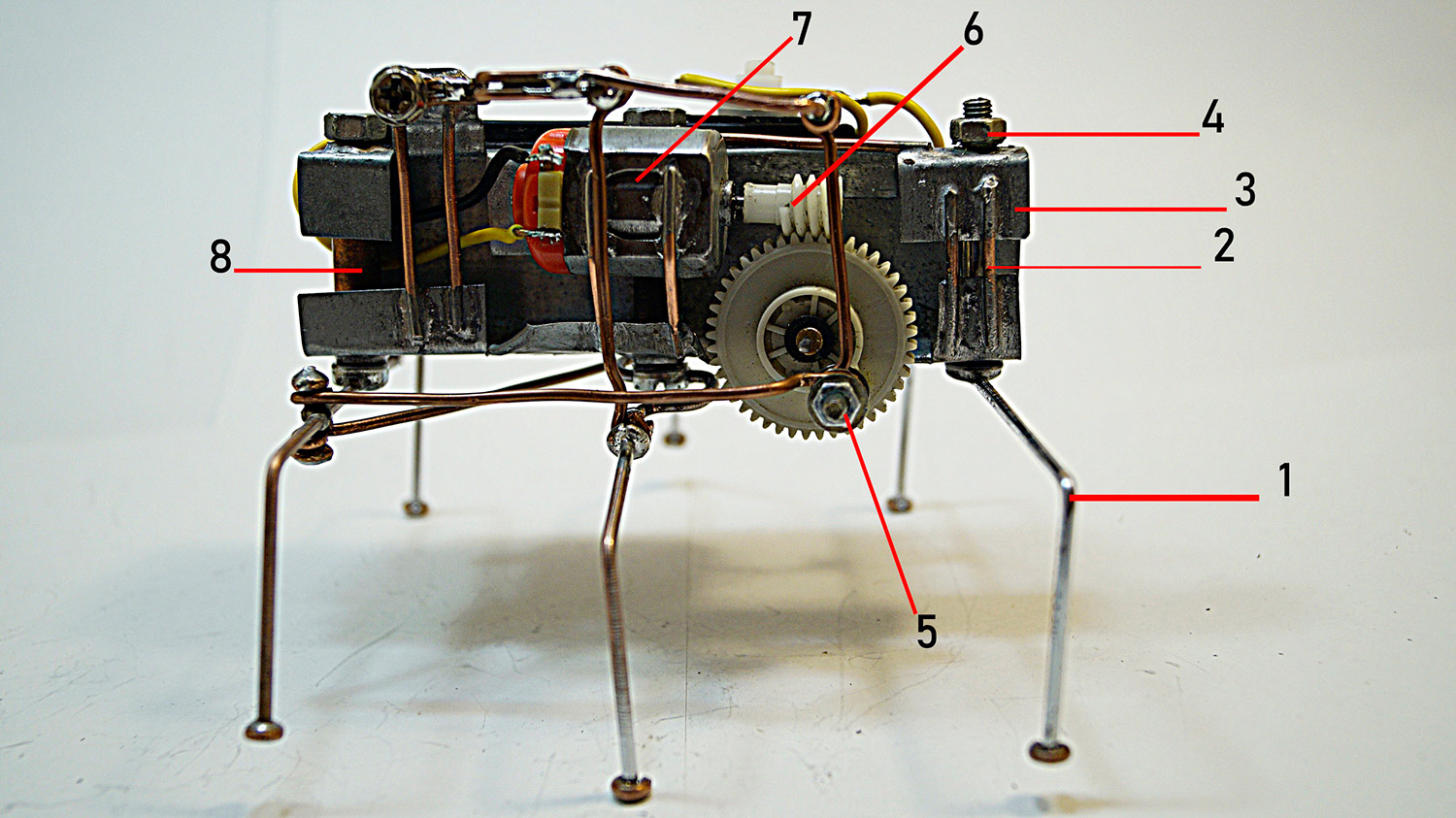
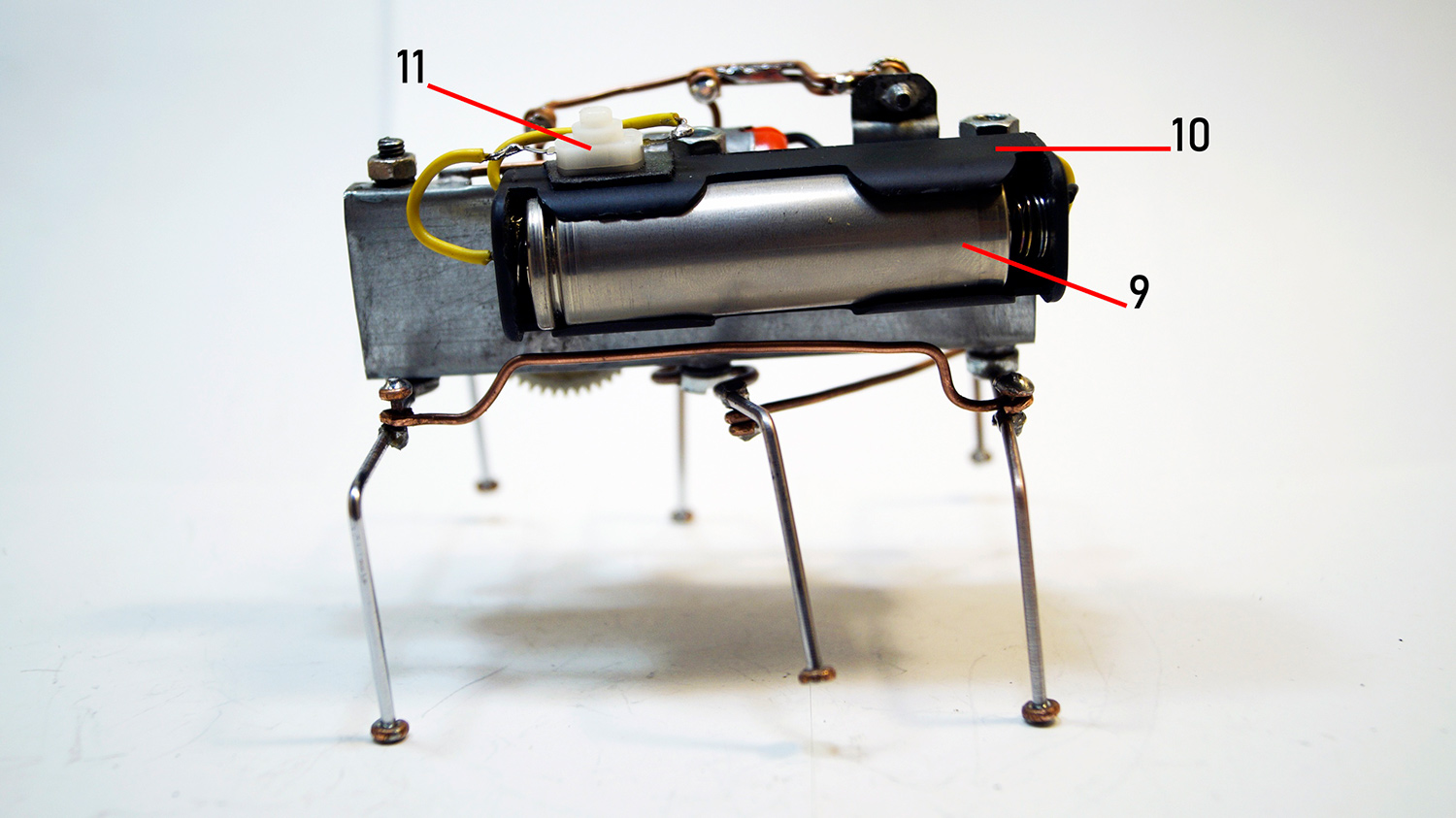
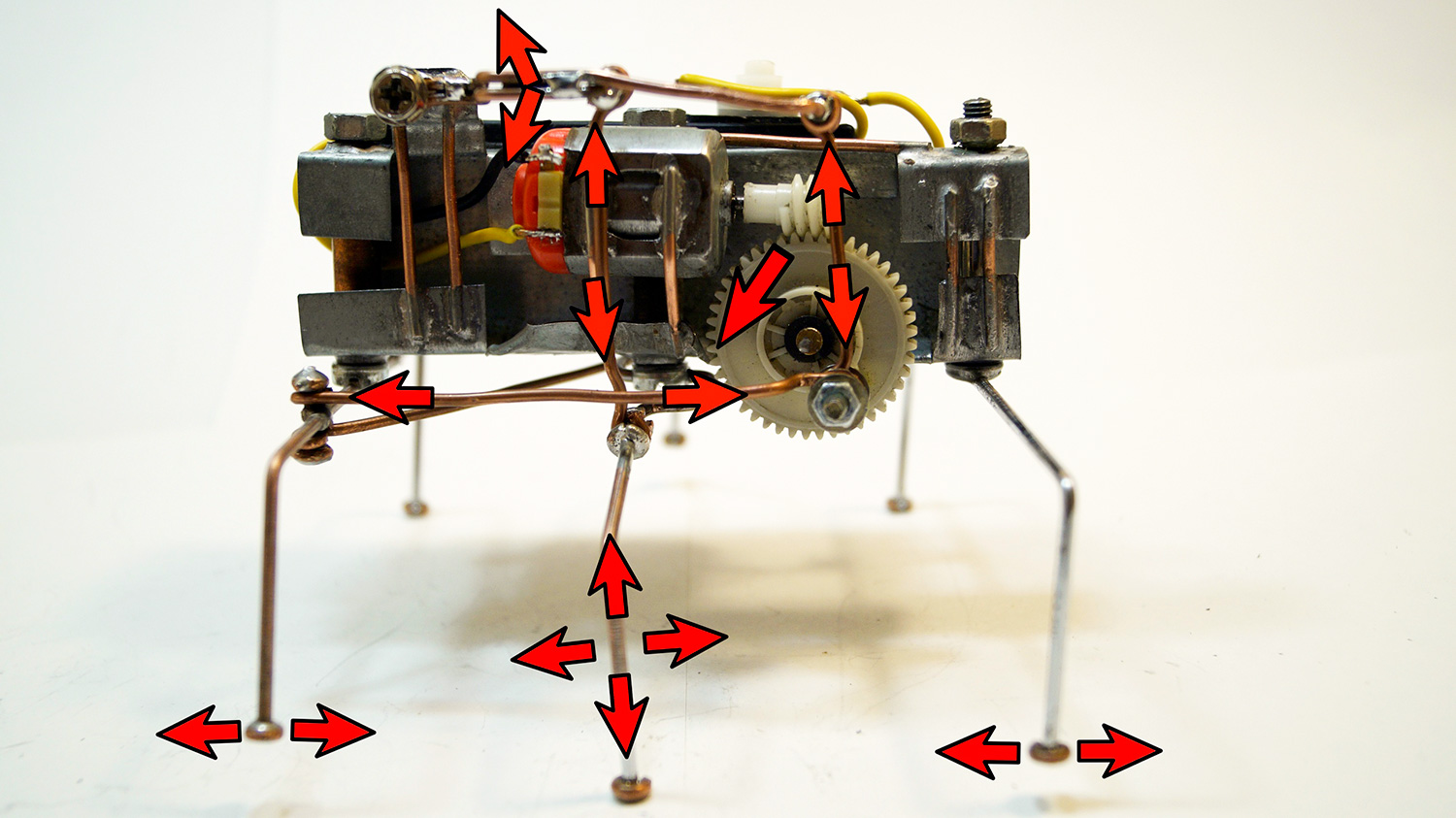
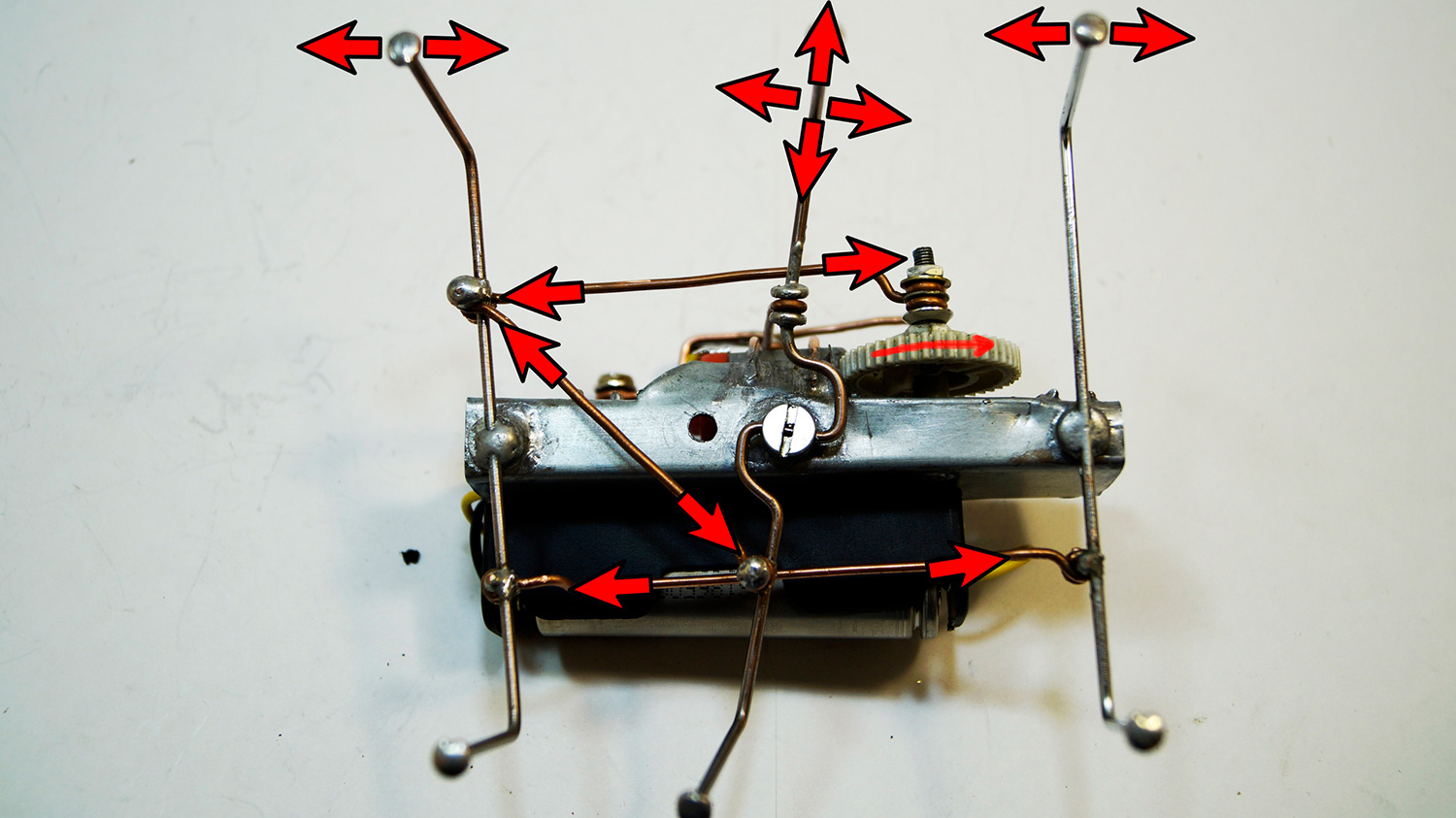
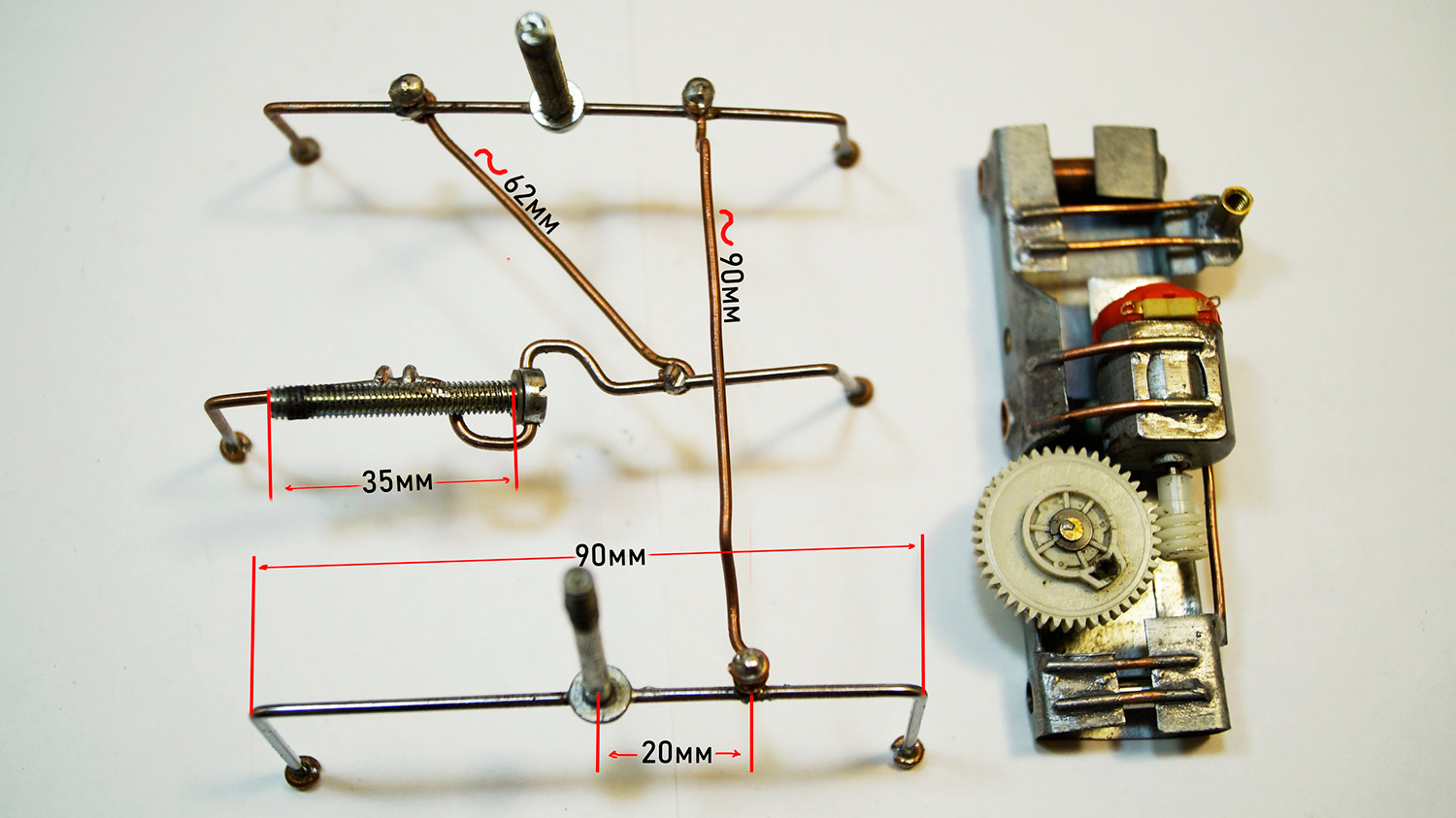
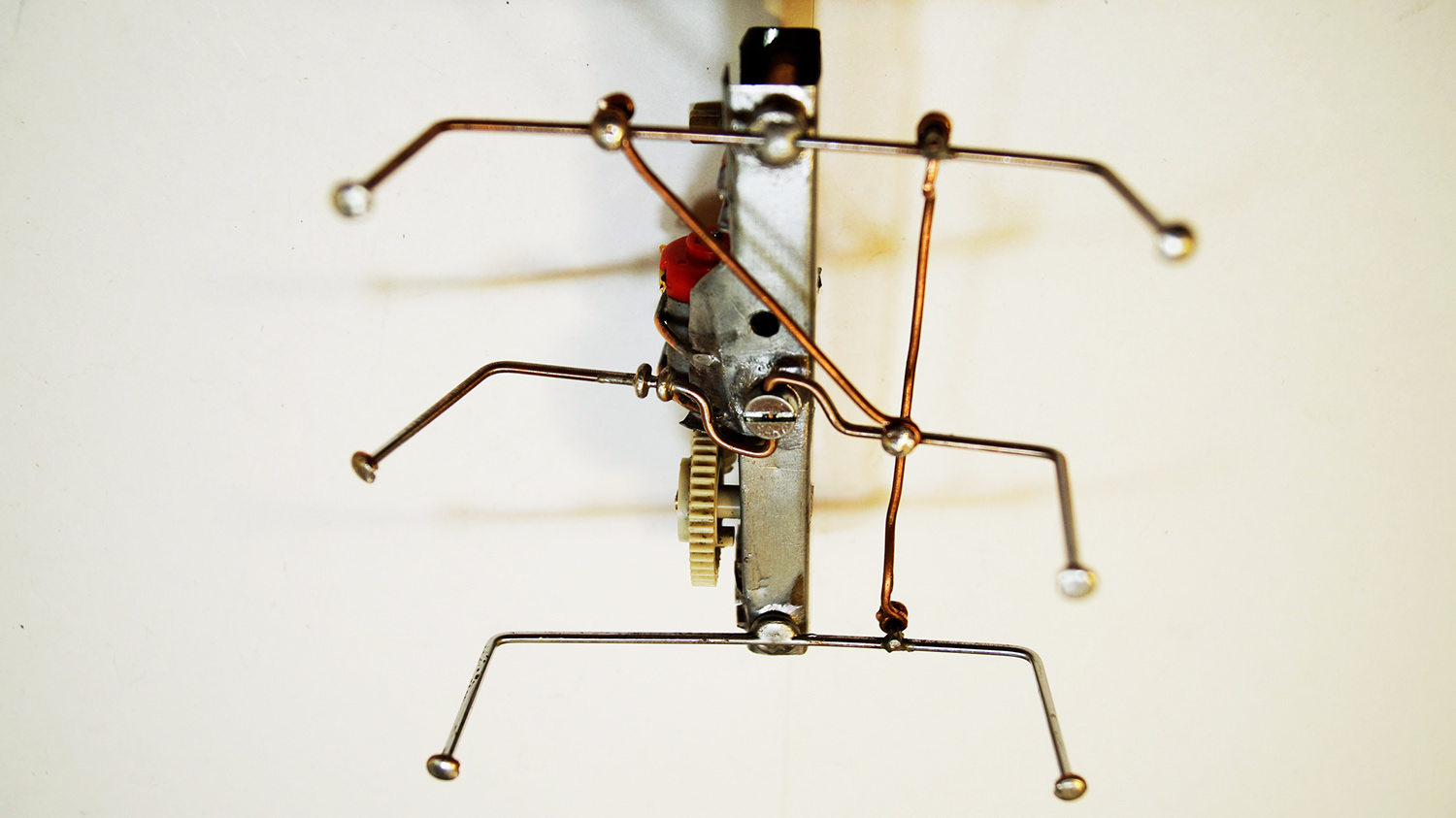
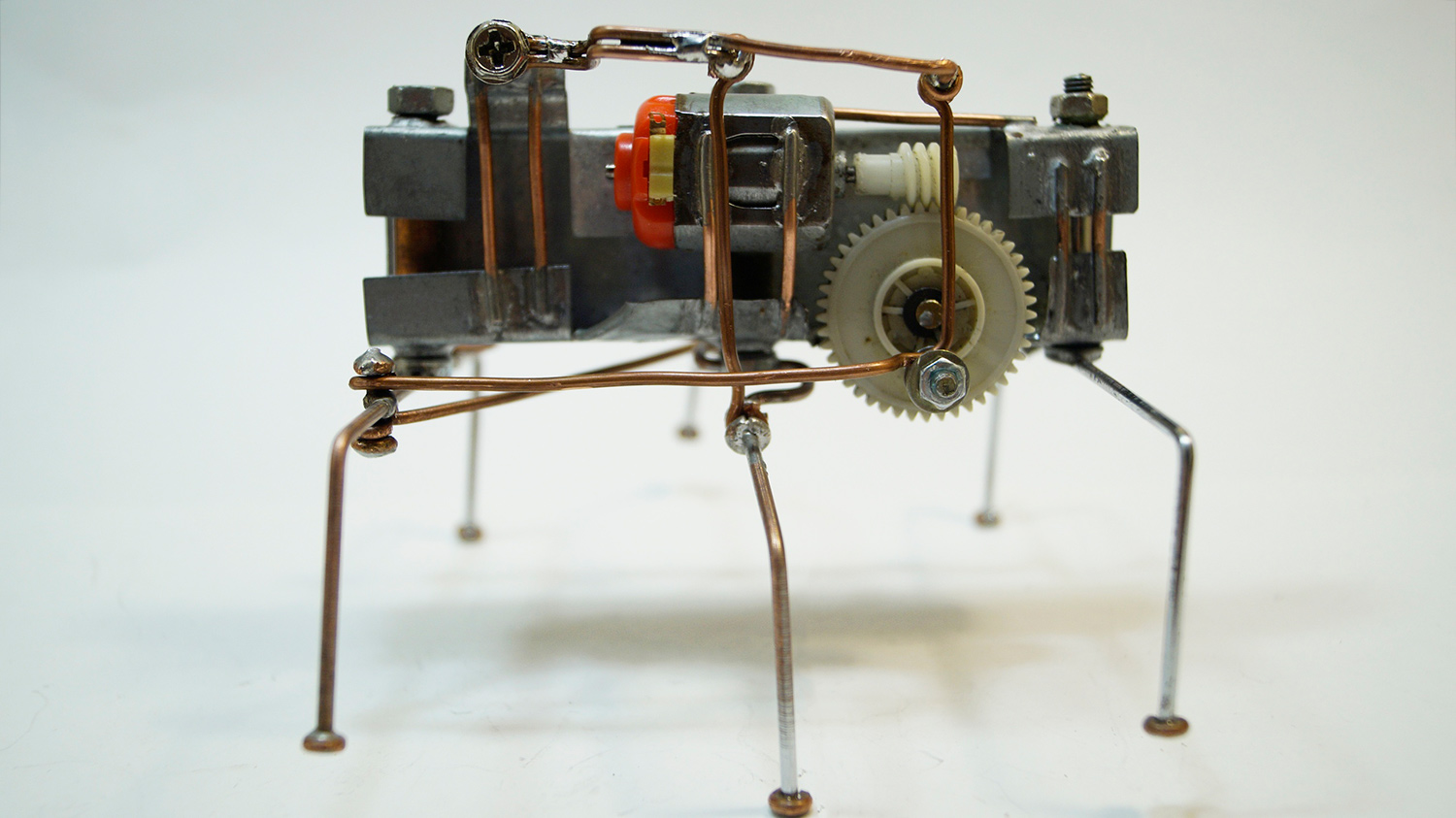
3.ПРИНЦИП РАБОТЫ. На фото 5. и фото.6. Показан принцип работы механических частей таракана. Стоит помнить, что передние и задние лапы робота, движутся по горизонтальной плоскости, а средние лапы движутся по вертикальной и горизонтальной плоскости.
На электродвигатель через ключ поступает питание, двигатель вращает кривошипный механизм. Кривошип приводит в движение через тягу переднюю лапу, соответственно от передней лапы тяга толкает заднюю лапу (они движутся синхронно). Средняя пара лап соединена с первой парой, накрест (они движутся в противофазе). Для движения средней пары лап вертикально, над моторчиком установлен рычаг, который приводится в движение от кривошипного механизма.
фото.5
фото.6
Конструкция робота-таракана собрана полностью навесным методом и не требует изготовления печатной платы.
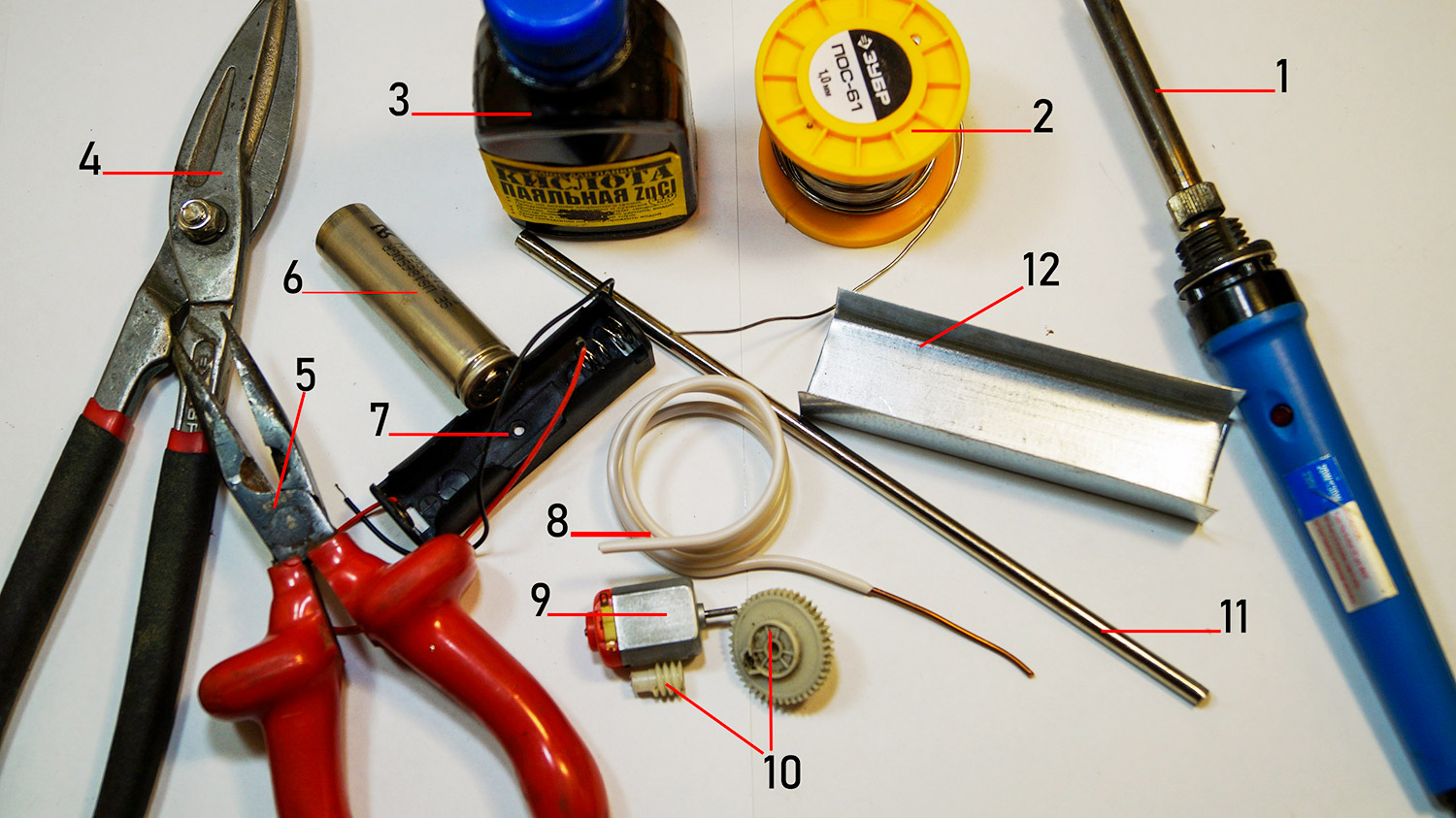
Для сборки робота подготовьте необходимые инструменты и детали, список которых приведён далее (табл.1,фото.7).
фото.7
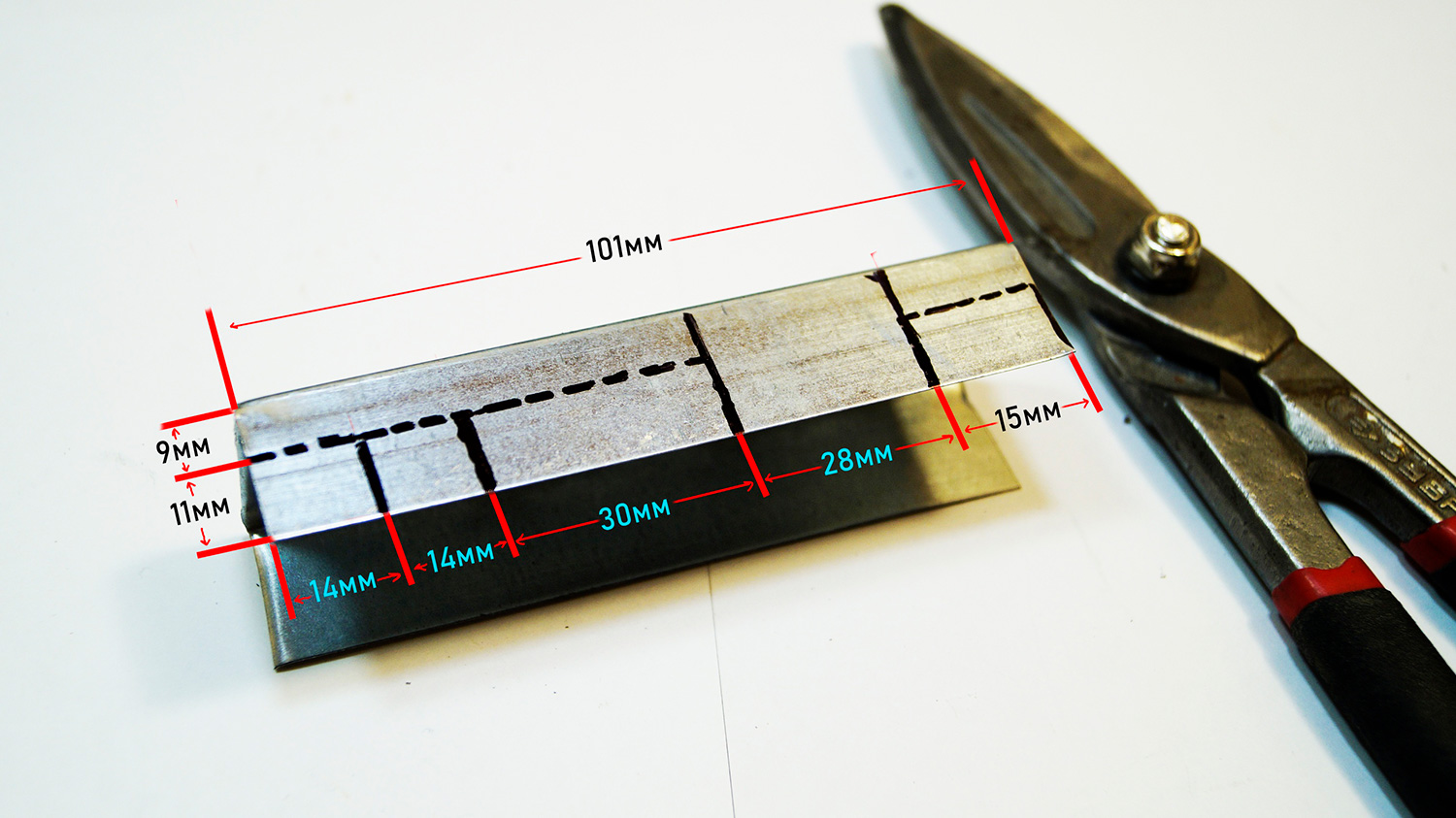
Рисуем на профиле разметку как указано на Фото 8.
фото.8 С помощью ножниц по металлу, отрезаем и загибаем заготовку плоскогубцами как указано на фото 9. Размечаем нижнюю часть как указано на фото 6. Загибаем профиль плоскогубцами как на фото 10.
фото.9
фото.10
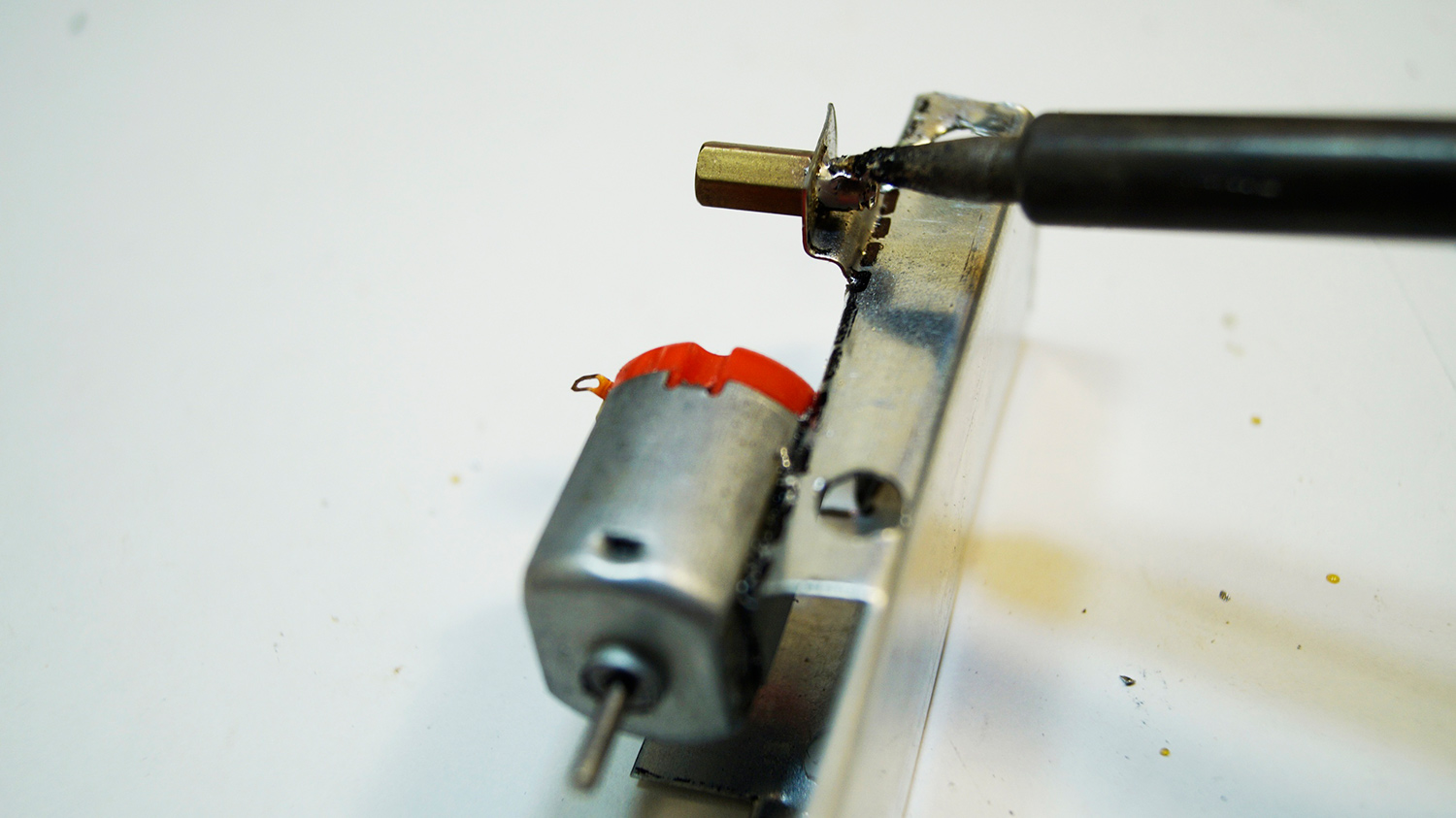
2.Установка мотора и монтаж оси кривошипа. Следующим этапом нужно припаять электромотор к раме. Электромотор перед пайкой нужно будет разобрать. Лудим корпус мотора и раму паяльником Фото 11.
фото.11
Спаиваем корпус электромотора и рамы вместе, хорошо прогревая детали паяльником прижав их друг к другу Фото 9.!!! БУДЬТЕ АККУРАТНЫ, ДЕТАЛИ СИЛЬНО НАГРЕВАЮТСЯ!!!
фото.12
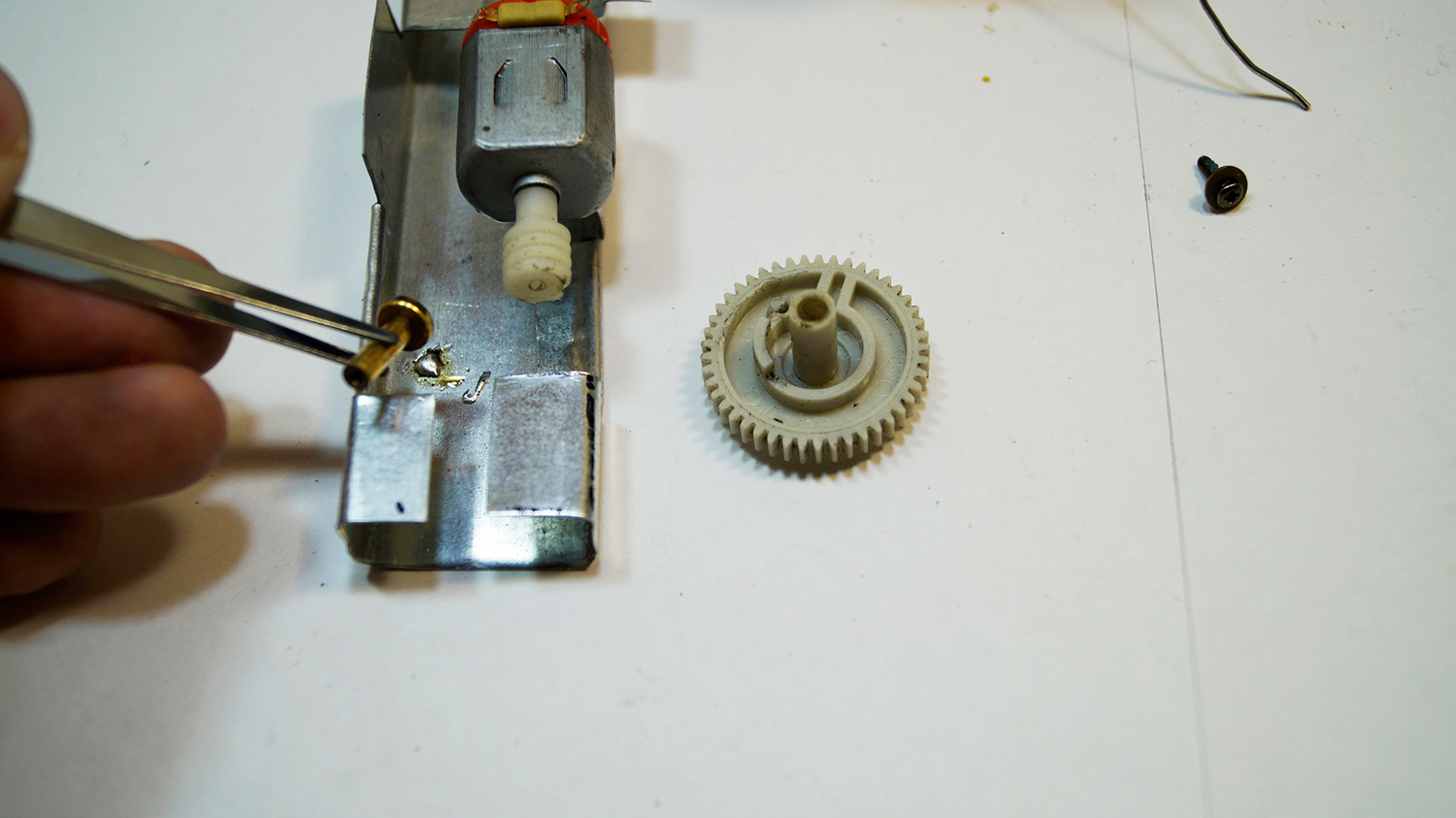
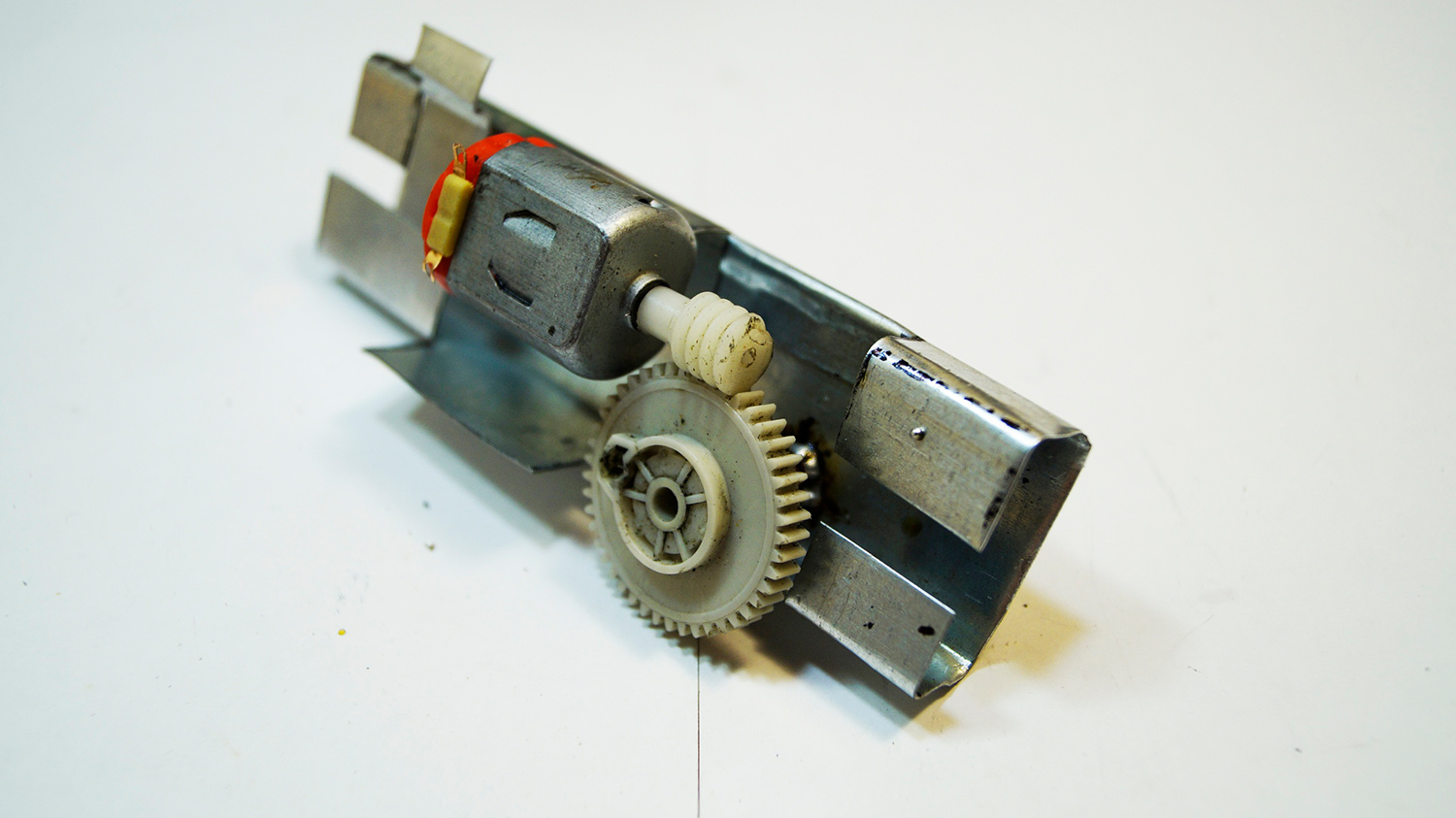
Собираем электромотор обратно. По месту припаиваем ось кривошипа, это делается экспериментальным путем. Червячная передача должна быть хорошо подогнана между собой, шестерни не должны быть перекошены Фото 13,14.
фото.13
фото.14
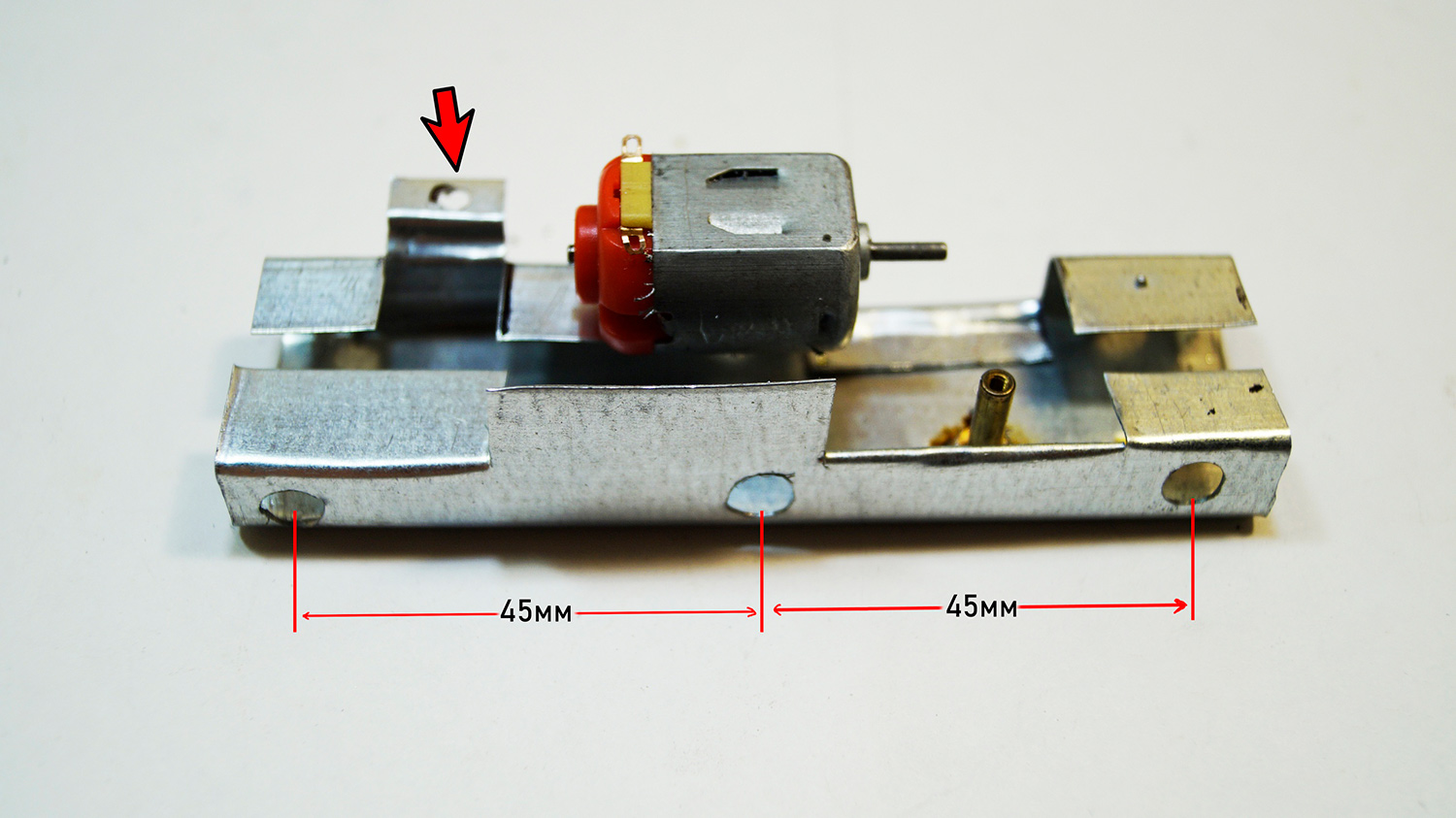
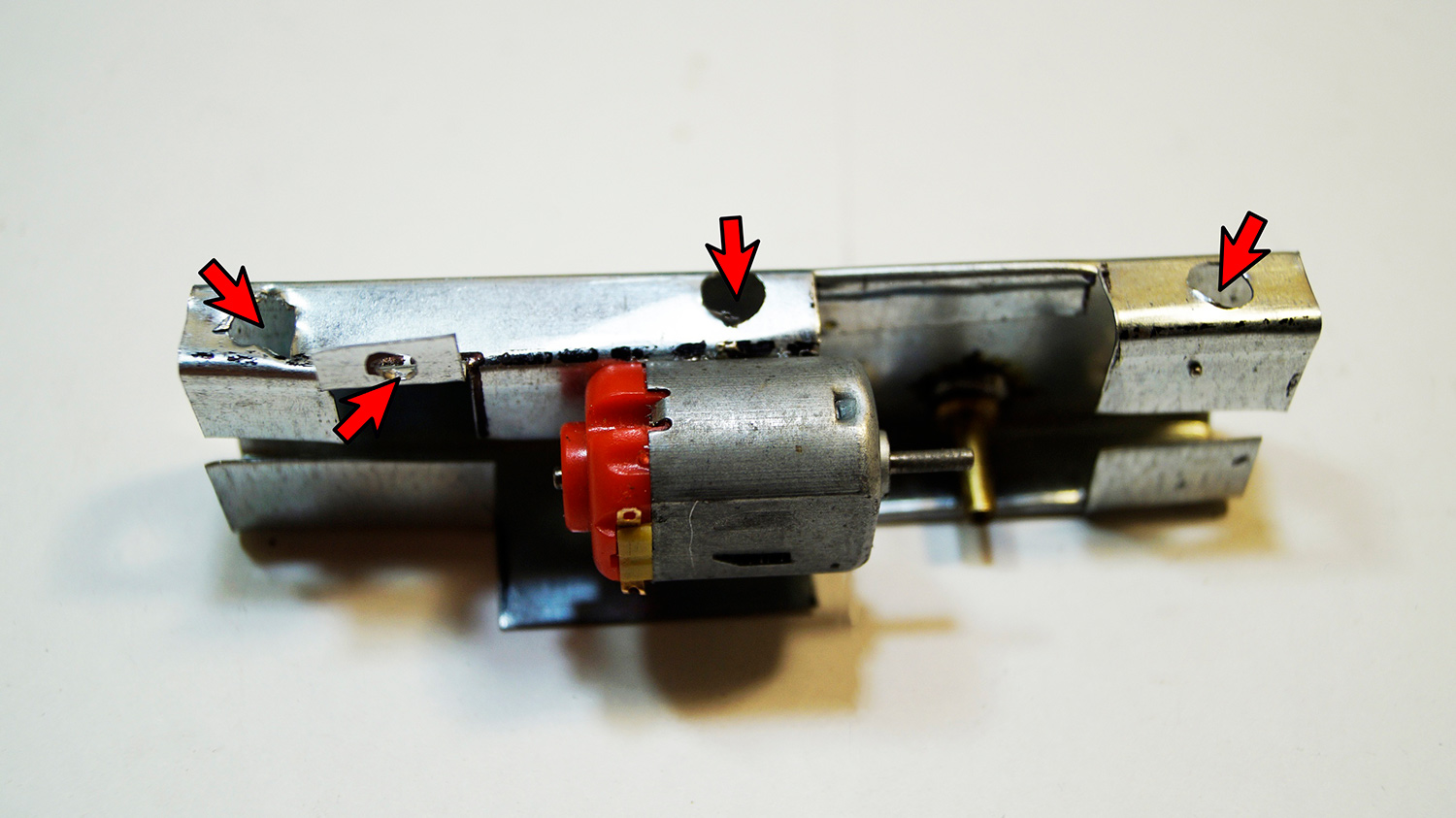
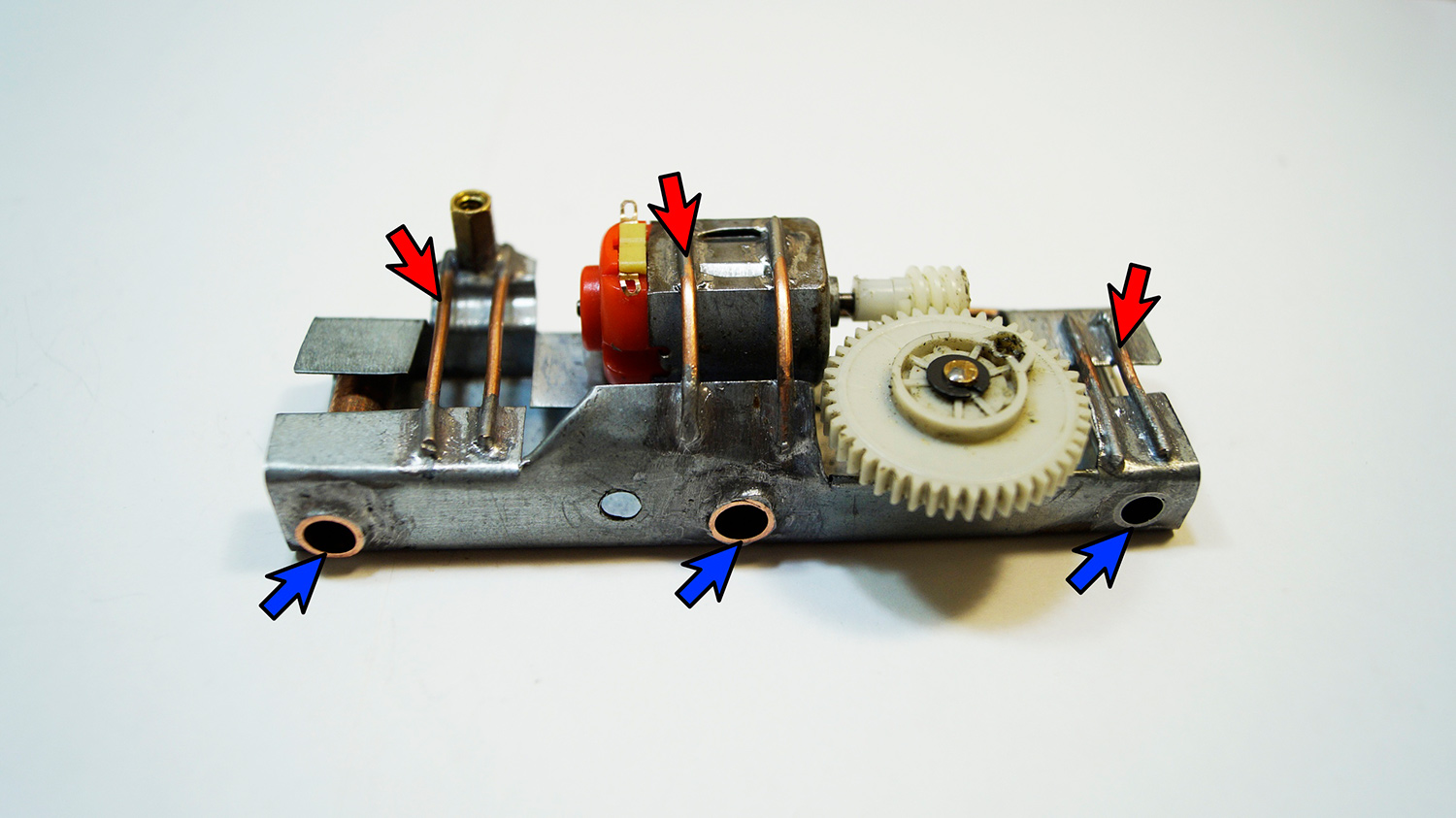
Для крепления лап таракана к раме, нужно просверлить отверстия сверлом 8мм. Сверлим отверстие в ушке за электромотором сверлом 3.2мм Фото 15, 16.
фото.15
фото.16
Также припаиваем на ушко за электромотором гайку. На эту гайку будет крепиться рычаг, отвечающий за подъем средних лап по вертикальной оси Фото 17.
фото.17
Для усиления конструкции рамы, были припаяны ребра жесткости медным проводом сечением 2,5мм.Также были впаяны втулки 8мм в места крепления лап таракана Фото 18.
фото.18
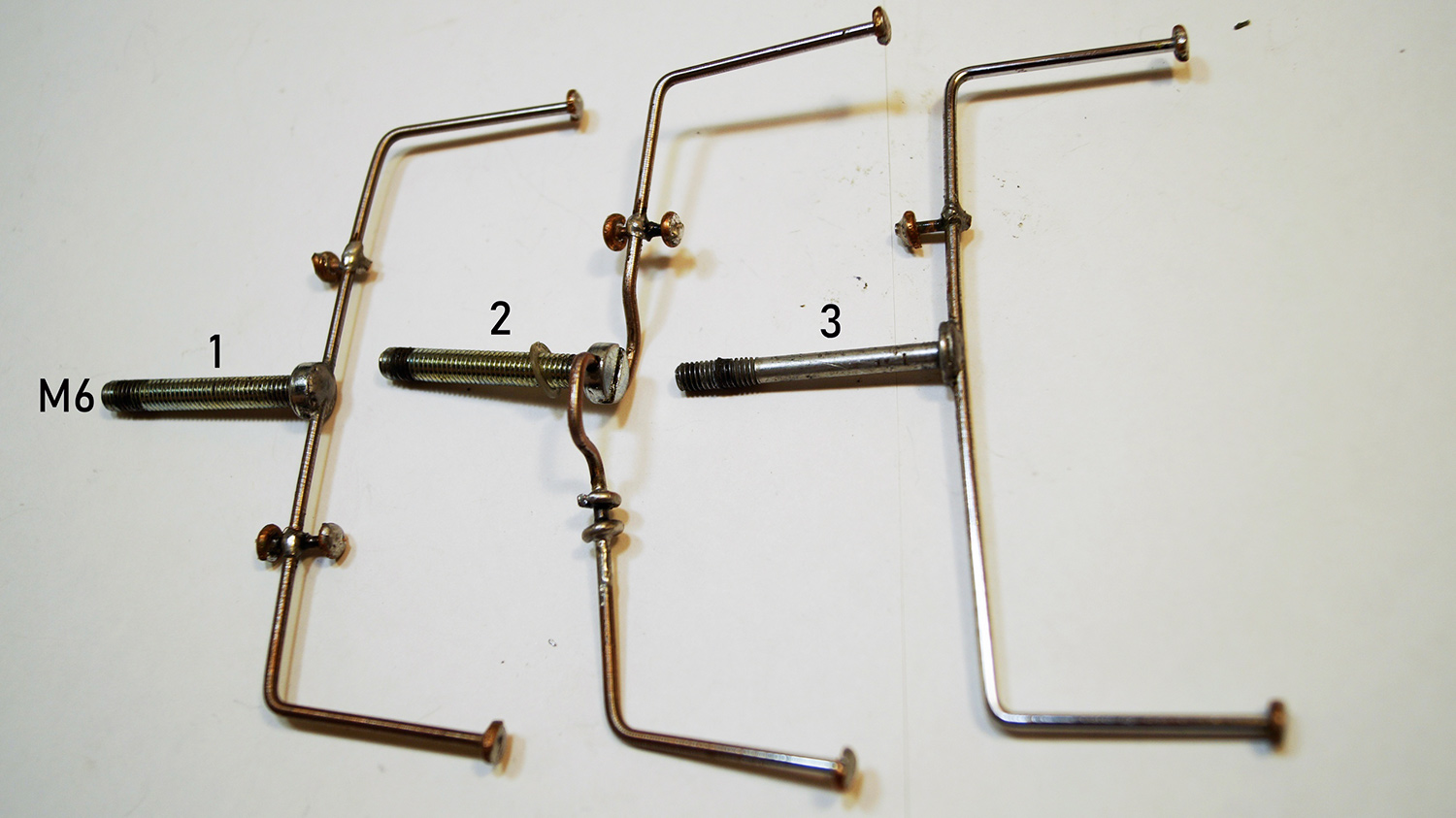
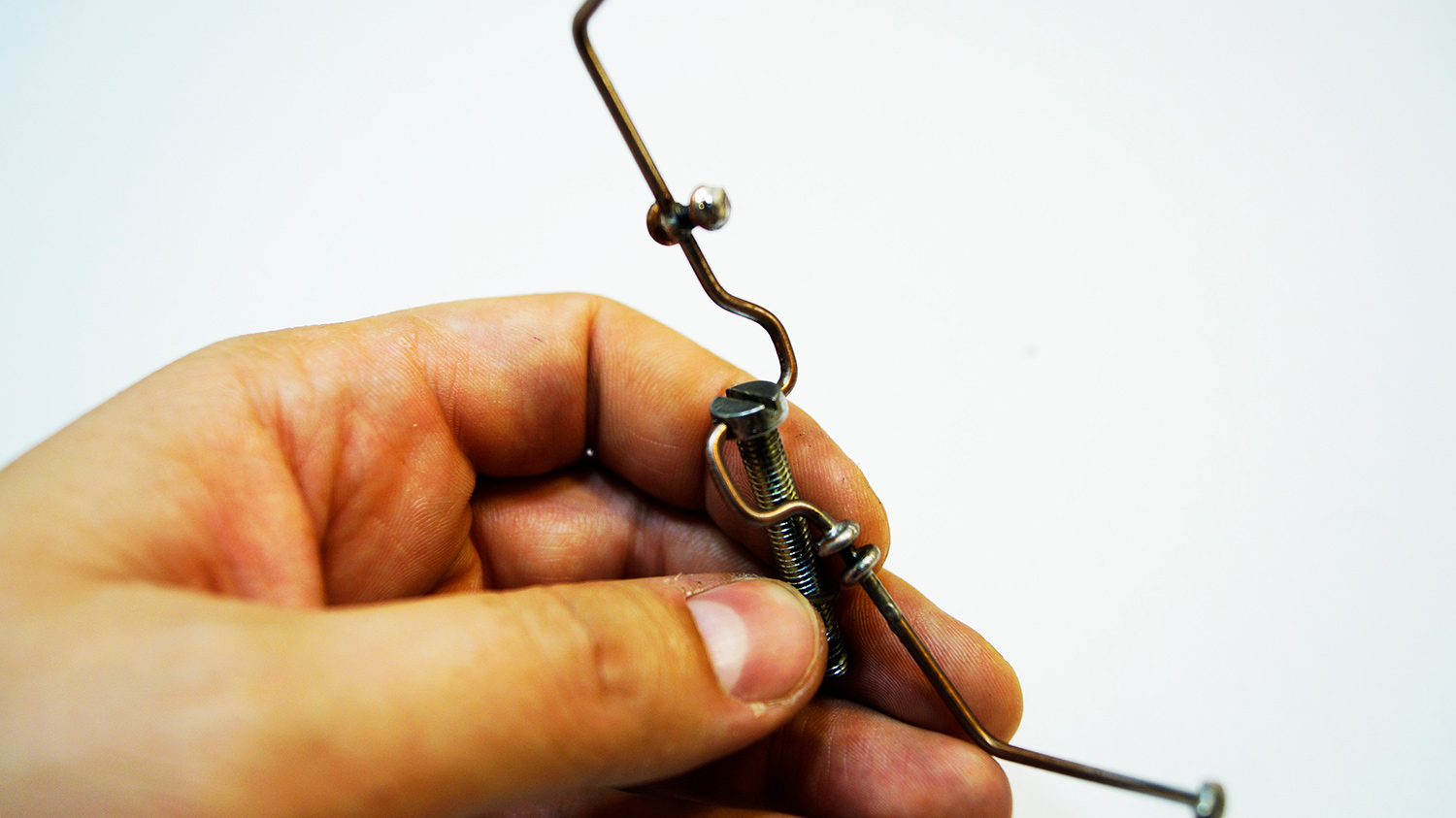
4.Опорные лапы таракана.
В качестве опорных лап таракана использована металлическая проволока диаметром 3мм, она припаяна к головке болта М6 Фото 19. Средняя пара лап таракана выполнена по-другому, в головке болта высверливается отверстие по диаметру проволоки. Проволока загибается в виде буквы “S”, это даст возможность лапам таракана двигаться вертикально Фото 20.
фото.19
фото.20
Для крепления тяговых элементов, к лапам таракана припаяна медная проволока сечением 2,5мм длиной 12мм, на концы ее припаиваются медные кольца. Тяги сделаны из медной проволоки сечением 2,5мм, размеры указываются приблизительно, проволоку желательно подогнуть, чтобы в дальнейшем была возможность регулировки по длине Фото 21. На Фото 22 показан вид снизу, с установленными лапами на раму.
фото.21
фото.22
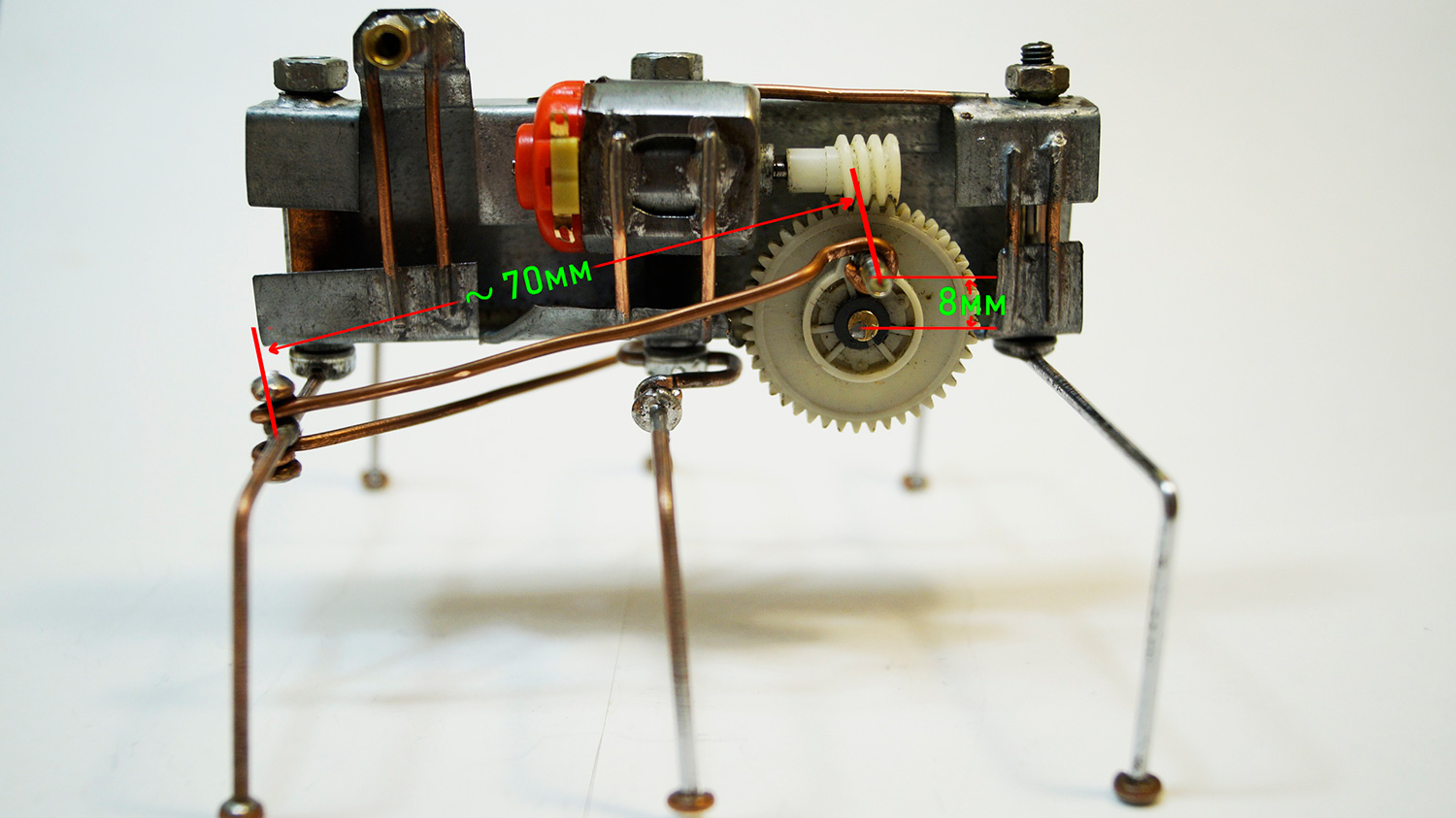
Устанавливаем тягу от кривошипного механизма до передних лап таракана. Тягу делаем с подгибом для возможности её отрегулировать. Радиус кривошипа 8мм Фото 23.
фото.23
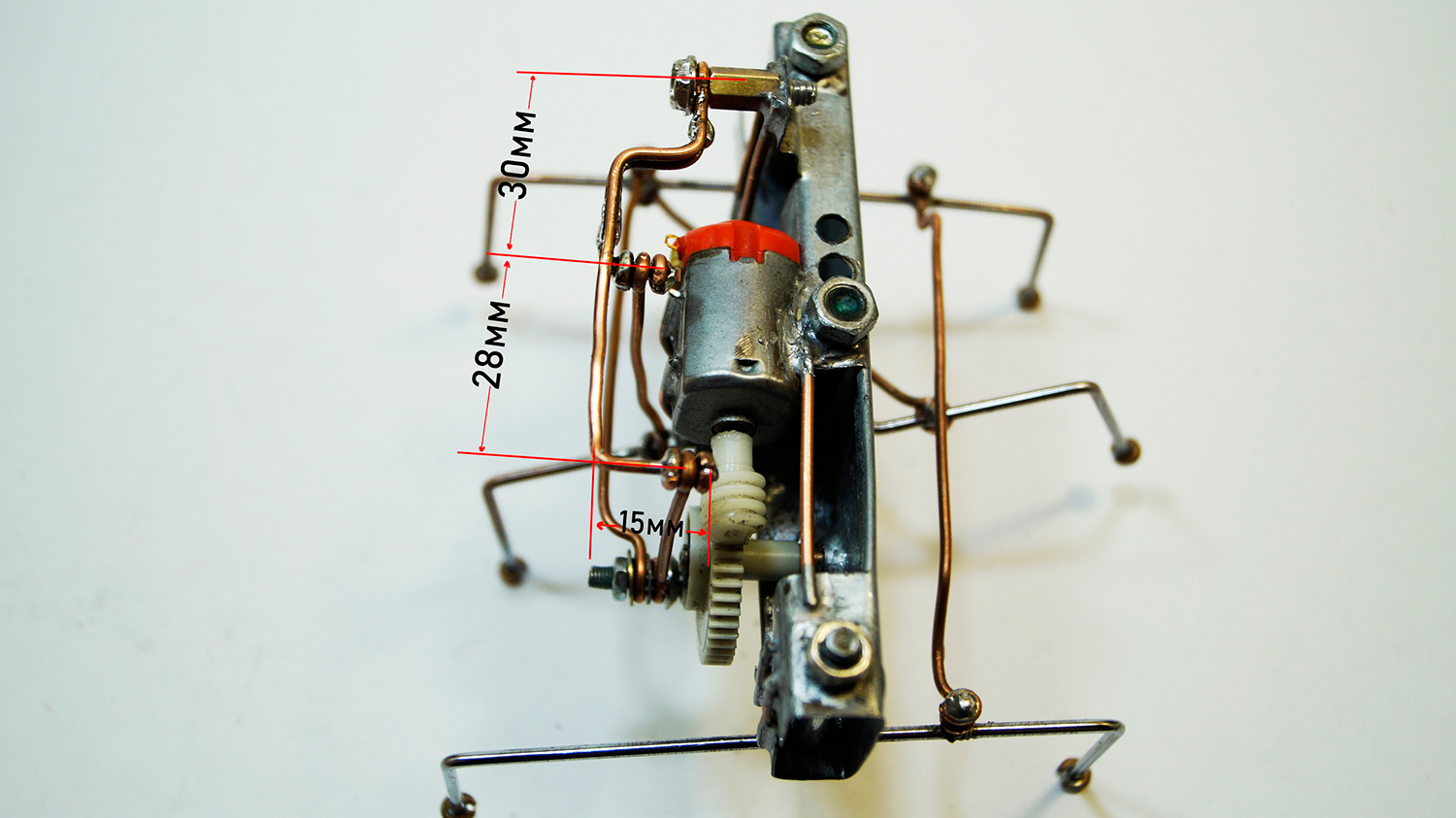
Изготавливаем из медной проволоки рычаг для движения средних лап вертикально Фото 24.25. На Фото 25. Показано расположение лап при нижнем положении вала кривошипного механизма.
фото.24
фото.25
На этом механическая часть таракана закончена.
Батарейный отсек приклеиваем на двухсторонний скотч к раме таракана. Кнопку включения приклеиваем на батарейный отсек. Для склеивания кнопки удобно использовать термоклей. Устанавливаем и припаиваем кнопку к источнику питания и мотору как на фото 26. Для соединения используем монтажный провод.
фото.26
РОБОТ ТАРАКАН ГОТОВ!!!
фото.27
Для того, чтобы электрическая часть работала без сбоев рекомендуется установить в конструкции "свежие" батарейки. Сборка окончена!
Автор Vadya Chubarov VK: страница пользователя
YouTube-канал "ВСЕ САМ" перейти на канал пользователя
©Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований. Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

| Всего комментариев: 0 | |