|

|
Хочешь собрать робота но не знаешь где достать все необходимые детали?
Закажи набор для сборки робота у нас! Мы подготовим для тебя специальный комплект, который будет включать в себя все необходимые радио-детали, датчики, моторчики, и печатные платы.
Чтобы заказать набор перейди в наш магазин и выбери наборы, которые тебе интересны
Перейти в магазин
|

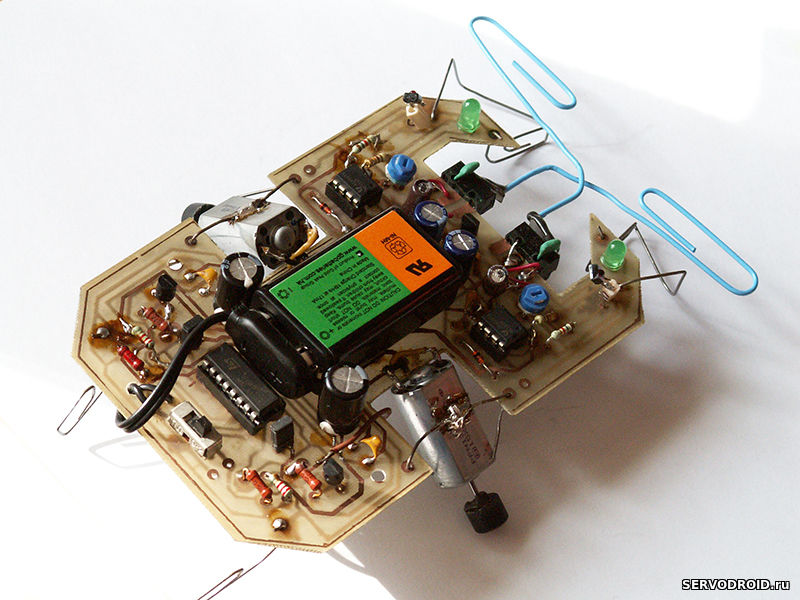
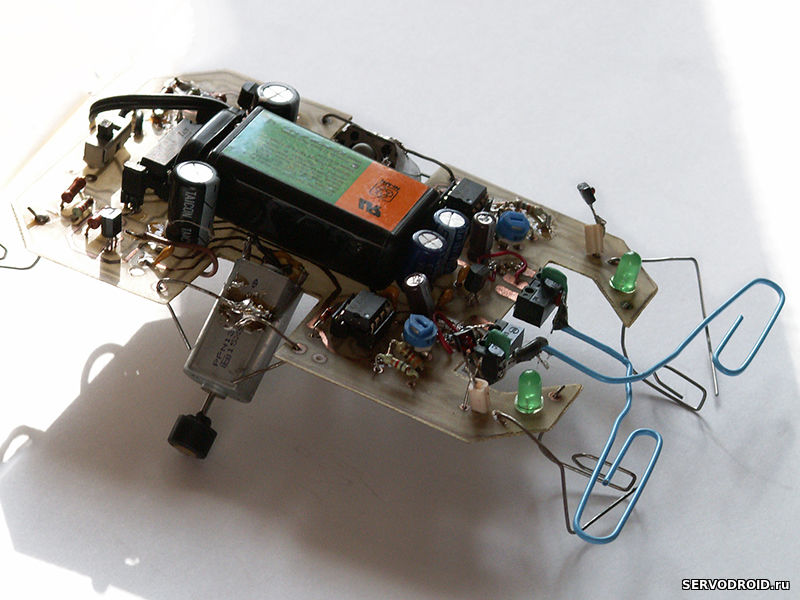
SYBUG - кибернетический жук, представляет собой подобие биологического жука. Он выполнен в виде кибернетической модели и способен взаимодействовать с окружающей средой с помощью внешних датчиков, рефлексивного поведения. Для создания миниэкосистемы, была также разработана и изготовлена зарядная станция, имитирующая элементы природного кормления жука. Поэтому, для описания поведения жука, мы будем рассматривать его взаимодействие с зарядной станцией, а так же с такими же моделями жуков (коммуникативная способность) $CUT$
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
- Напряжение питания.....................8,4в или 9в.
- Кол-вот моторов..........................2
- Кол-во тактильных сенсоров..........2
- Кол-во фотосенсоров....................2
- Токосъёмники.............................2
- Сигнальная система +
***
Техническая кибернетика - наука об управлении техническими системами. Кибернетика изучает вопросы разработки и конструирования автоматов (в том числе современных ЭВМ и роботов), а также проблемы технических средств сбора, передачи, хранения и преобразования информации, опознания образов и т. д.
Основная цель кибернетики как науки об управлении - добиваться построения на основе изучения структур и механизмов управления таких си¬стем, такой организации их работы, такого взаимодействия эле¬ментов внутри этих систем и такого взаимодействия с внешней средой, чтобы результаты функционирования этих систем были наилучшими, т.е. приводили бы наиболее быстро к заданной цели функционирования при минимальных затратах тех или иных ресурсов (сырья, энергии, человеческого труда, машинного времени горючего и т. д.).
Биологические существа, в нашем случае жучки, природой приспособлены к взаимодействию с окружающей средой. Поэтому роботы, построенные и функционирующие по этим принципам способны к более “интеллектуальному” поведению, энергоэкономичны. В перспективе подобный симбиоз, возможно, приведёт к созданию новых технических разработок или устройств, появлению нового класса бытовых приборов с адаптирующимися алгоритмами функционирования. А так же станет научным инструментом познания законов взаимодействия живых организмов. Как одно из практических направлений реализации потенциала заложенного в идее - это проведение различных экспериментов по моделированию поведения биологических существ.
В нашем объединении были проведены исследования в этой области, в результате этой работы была изготовлена модель кибернетического робота-жука. Эта модель является попыткой создания кибернетического организма на биологических принципах и использует некоторые элементы поведения простых биологических существ. Кибернетический жук способен: испытывать два состояния: “голод”, “сытость”, реагировать на свет и тень, чувствовать прикосновения к окружающим предметам, взаимодействовать с кормушкой (зарядной станцией) и такими же жуками как он сам.
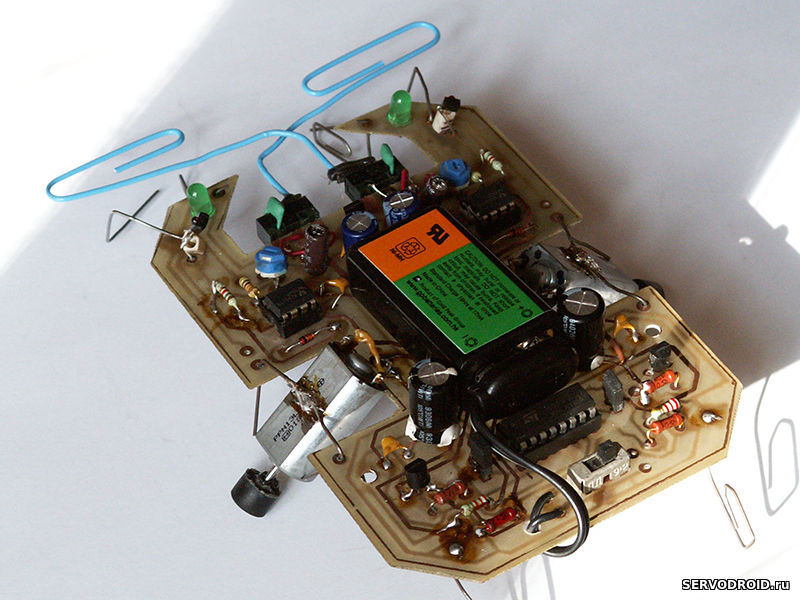
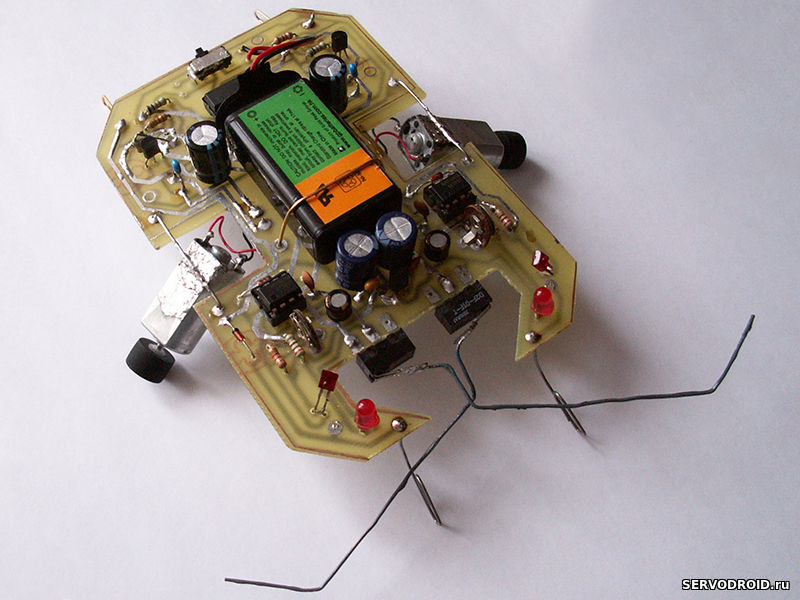
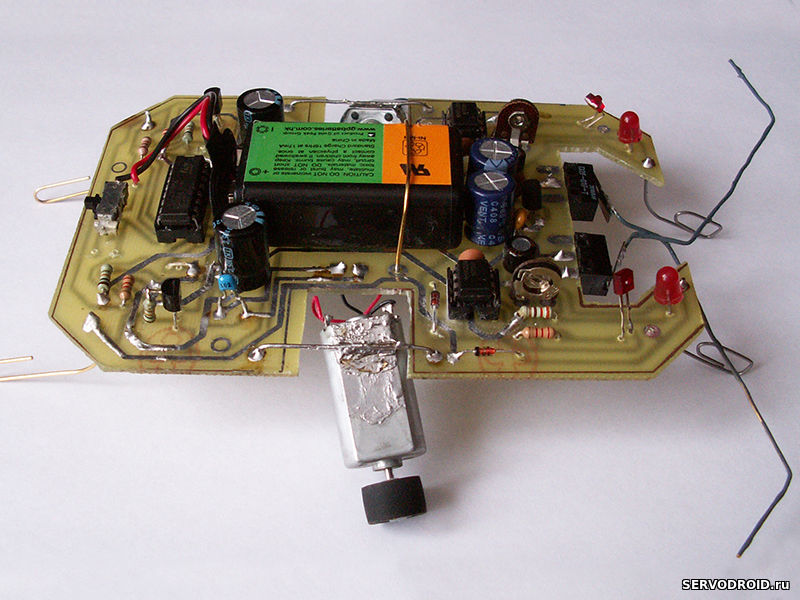
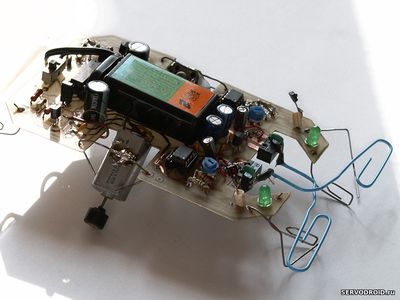
УСТРОЙСТВО КИБЕРНЕТИЧЕСКОГО ЖУКА.
Как и живой организм, кибернетический жук имеет силовую часть – моторы, интеллектуальный модуль (генератор поведений), сенситивные датчики обратной связи (фото- и тактильные датчики), источник энергии (аккумулятор).
Т
ехнически робот состоит из: основной печатной платы, интеллектуального модуля-надстройки, электродвигателей, тактильных и фотодатчиков, генераторов инфракрасного излучения, источника энергии (аккумулятора).
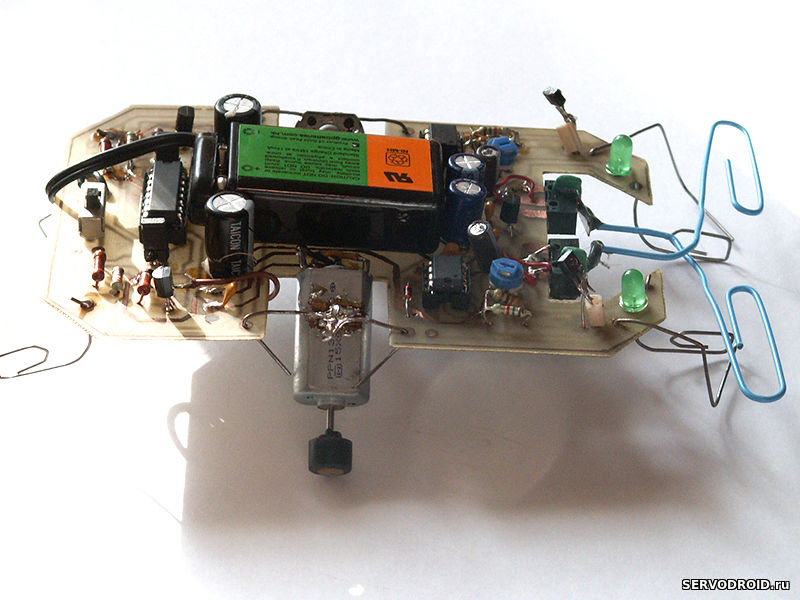
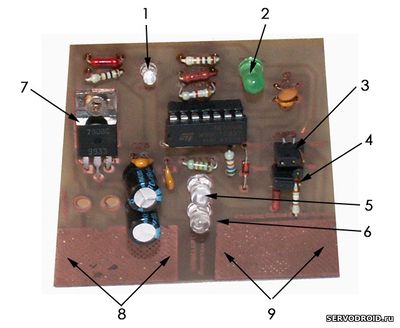
Фото.1 Устройство кибернетического жука.
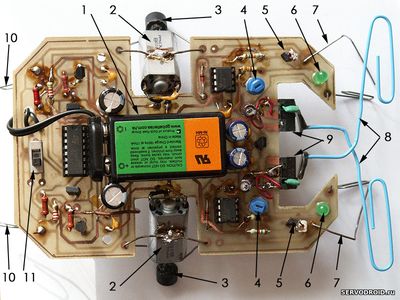 |
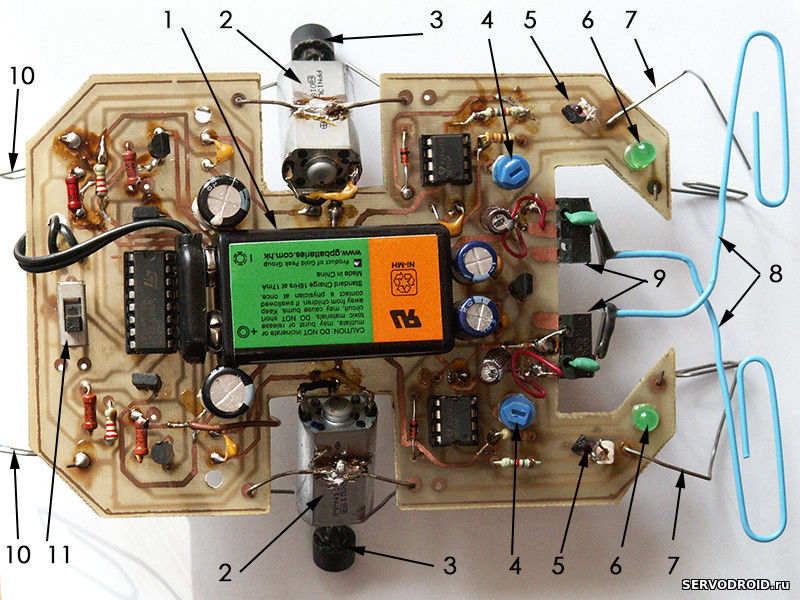
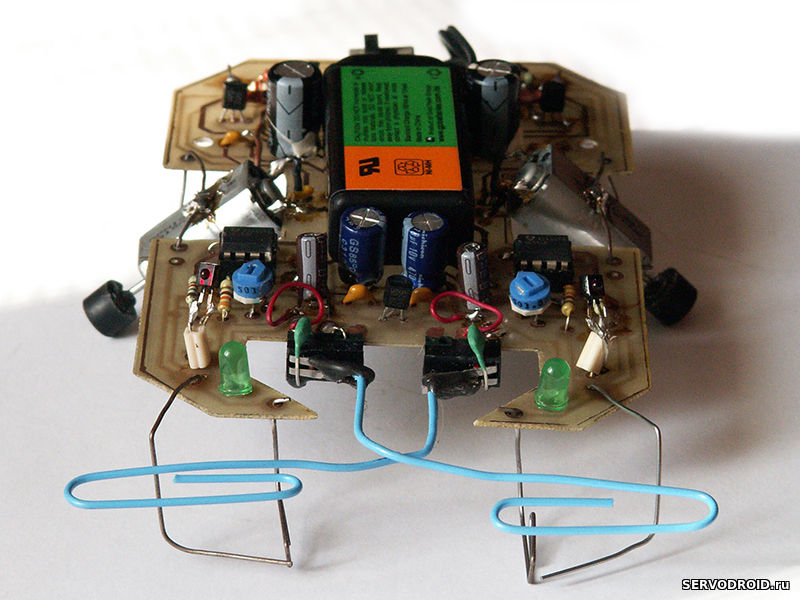
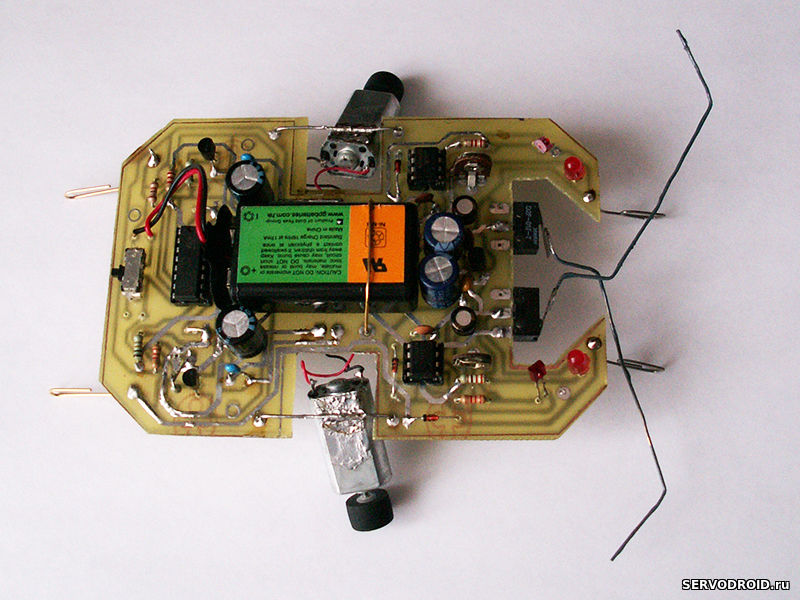
КОМПОНЕНТЫ КОНСТРУКЦИИ РОБОТА
1. Аккумуляторная батарея 8,4в. При замене на обычную батарею типоразмер 6FF22 напряжением 9в автоподзарядка не нужна.
2. Моторы низковольтные 2шт.
3. Колёса (ролики резиновые диаметром 12мм) 2шт.
4. Раздельная для каждого мотора регулировка ширины шага жука. 2шт подстроечных резистора.
5. Фотосенсоры в качестве которых установлены фотодиоды (или фототранзисторы). С их помощью робот способен обнаружить источник света. 2шт.
6. Светодиоды для индикации обратных реакций робота. Световые импульсы также упрощают подстройку ширины шага робота. 2шт.
7. Передние шасси-токосъёмники. Используются при автоматической подзарядки от зарядной станции. 2шт.
8. Тактильные усы реагирующие на столкновение с объектами. 2шт.
9. Микропереключатели срабатывающие при смещении тактильных усов. 2шт.
10. Задние шасси. 2шт.
11. Выключатель питания.
|
Функциональное назначение основных компонентов кибернетического жука.
- Выключатель питания – включение-выключение модели робота.
- Аккумуляторная батарейка – источник энергии.
- Фотосенсоры – элементы, реагирующие на уровень освещённости.
- Тактильные сенсоры – датчики столкновений, реагирующие на прикосновение к предметам.
- Управляемый генератор импульсов – микросхема, задающая ширину шага жука в зависимости от уровня освещённости.
- Драйвер двигателей – микросхема, непосредственно управляющая электродвигателями.
- Переднее шасси-токосъёмник 1- предназначено для съёма напряжения с зарядной станции, а также является передней опорой.
- Переднее шасси-токосъёмник 2 – предназначено для съёма напряжения с другого кибержука (данной модели).
- Заднее шасси-токосъёмник – предназначено для разрядки аккумуляторной батарейки другим жуком, а также является задней опорой.
- Модель кибернетического жука включает в себя также интеллект-модуль. Интеллект модуль технически устанавливается в виде надстройки над основной платой. Питается от общего источника питания, то есть аккумулятора. Назначение интеллект-модуля: проявление коммуникативных способностей в отношении таких же моделей кибернетических жуков, организация системы самоподзарядки.
Табл1.Технические характеристики кибернетического жука.
| Параметр |
Данные |
Примечание |
| Напряжение питания |
8,4V |
аккумулятор |
| Ток потребления,мА |
до 400мА |
при макс. нагрузке |
| Кол-во моторов |
2 |
рабочее напр. не более 6 вольт |
| Кол-вот тактильных сенсоров |
2 |
датчики прикосновений |
| Кол-во фотосенсоров |
2 |
фототранзисторы |
| Сигнальная система |
3 |
светодиоды для индикации процессов |
| Габариты печатной платы |
85.4 x 127.4мм |
фигурная форма |
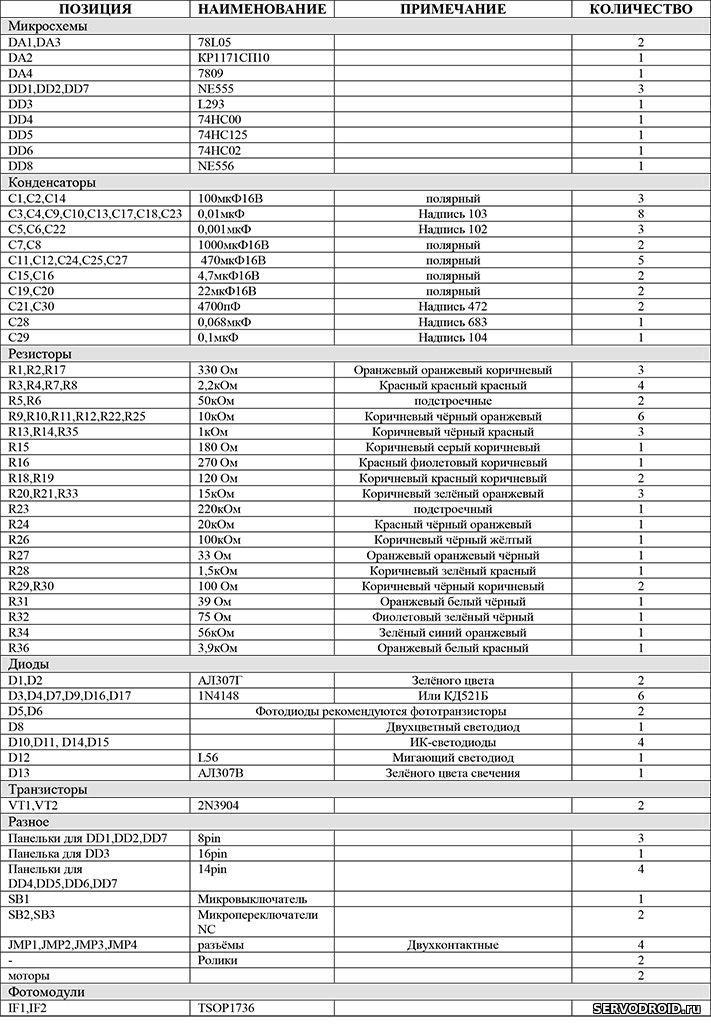
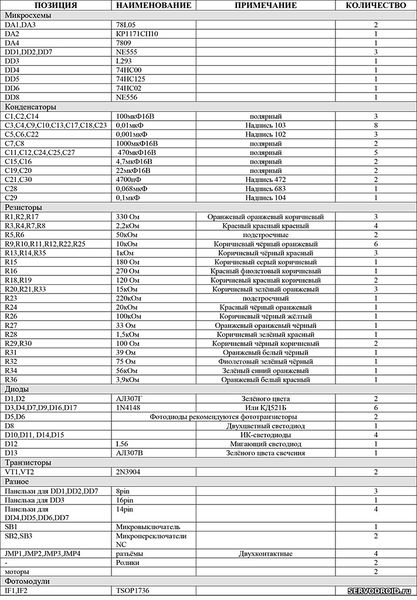
Список радиокомпонентов жука приведен в табл.2. Рекомендуется проверить соответствие радиокомпонентов в таблице и на основной схеме жука. Если сборка зарядной станции не планируется исключите лишние компоненты из таблицы.
Табл.2. Список радиокомпонентов
ЗАРЯДНАЯ СТАНЦИЯ
Зарядная станция позволяет производить зарядку жука в автоматическом режиме. Но при условии, что на жуке установлена схема анализа уровня напряжения и поиска зарядной станции. Система селективного зрения жука определяет положение зарядной станции по излучению в фиксированном диапазоне. Затем жук сближается с зарядной станцией, останавливается и через контактную группу заряжает аккумулятор.
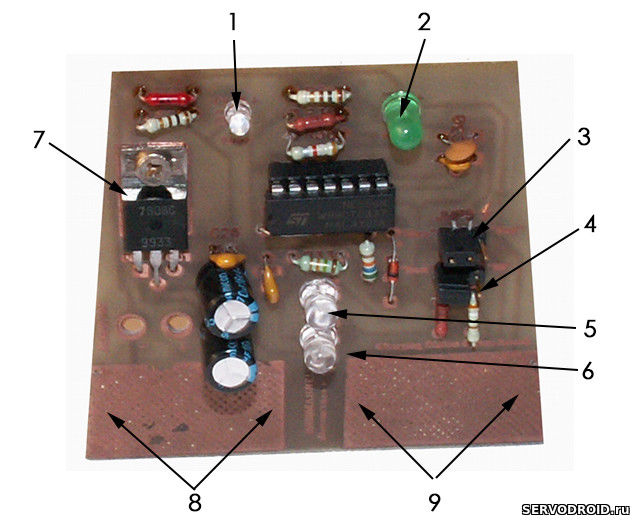
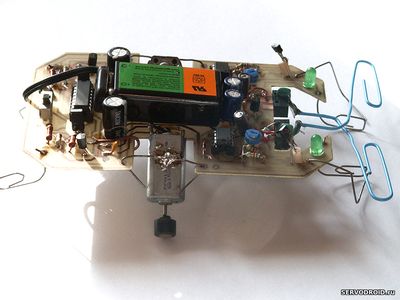
Фото.2 Устройство зарядной станции
  |
КОМПОНЕНТЫ КОНСТРУКЦИИ ЗАРЯДНОЙ СТАНЦИИ
1. Светодиод индикатор включения.
2. Светодиод индикатор процесса зарядки.
3. Джампер для переключения скорости зарядки: быстрее-медленее
4. Джампер для переключения радиуса действия ик-излучения ближе-дальше.
5. Инфракрасный светодиод в корпусе 5мм.
6. Инфракрасный светодиод в корпусе 5мм.
7. Микросхема-стабилизатор напряжения.
8. Контактная пластина для подзарядки робота.
9. Контактная пластина для подзарядки робота.
|
Функциональное назначение основных компонентов зарядной станции.
...............................................................................................................................
• Контактная группа – для съёма энергии, подзарядки аккумулятора.
• Микросхема-генератор – генерирует сигнал фиксированной частоты.
• ИК-светодиоды – для генерации ИК-сигнала, по нему жук определяет направление на зарядную станцию.
• Переключатель радиуса действия ИК-излучения – позволяет выставить стандартный или большой радиус действия ИК-излучения. При большом радиусе жук способен обнаружить зарядную станцию на большем расстоянии, но при этом ИК-излучение может заглушить излучение от других жуков.
• Индикатор включения – этот светодиод начинает светиться при включении зарядной станции.
• Стабилизатор напряжения – устанавливает фиксированное напряжение питания схемы станции, что позволяет подключать адаптер в качестве источника напряжения с широким диапазоном выходного напряжения до 17 вольт.
• Индикатор процесса зарядки – светодиод начинает светится во время зарядки и перестаёт светится после того как аккумулятор заряжен.
• Переключатель скорости зарядки – позволяет выставлять скорость зарядки аккумулятора “быстрее-медленнее”.
ПРИНЦИП РАБОТЫ ЖУКА
А теперь разберем, как работает кибернетический жук. Ключевыми элементами поведения жука является рефлексы. Взаимодействие разных рефлексов приводит к сложному поведению, способности быстро и правильно реагировать на возникшие ситуации. Поэтому интеллект жука построен на множестве разнообразных рефлексов, которые активируются при взаимодействии с внешней окружающей средой (свет, тень, предметы), от изменяющихся внутренних процессов (разрядка аккумулятора), от предустановленных переменными регулировками процессов (ширина шага, радиус действия сигнала генератора).
Модель кибернетического жука кроме основной платы включает в себя также интеллект-модуль. Интеллект модуль устанавливается в виде надстройки над основной платой. Питается от общего источника питания, то есть аккумулятора. Назначение интеллек-модуля: проявление коммуникативных способностей в отношении таких же моделей кибернетических жуков, организация системы самоподзарядки.
Интеллект кибернетического жука включает в себя: два автоматически изменяющихся типа поведения (жертва-хищник), коммуникативную способность (обнаружение себе подобных), рефлекс фототропизма (поиск источника света), рефлекс пассивного и селективного восприятия объектов (свет-тень, коммуникативные способности), рефлекс голода (поиск зарядной станции и подзарядка), тактильный рефлекс (сенсоры-усы), способность к преодолению препятствий, рефлекс “шаг жука”, три световых рефлекса сигнальной системы.
ПОДРОБНОЕ ОПИСАНИЕ ПОВЕДЕНИЯ И РЕФЛЕКСЫ ЖУКА
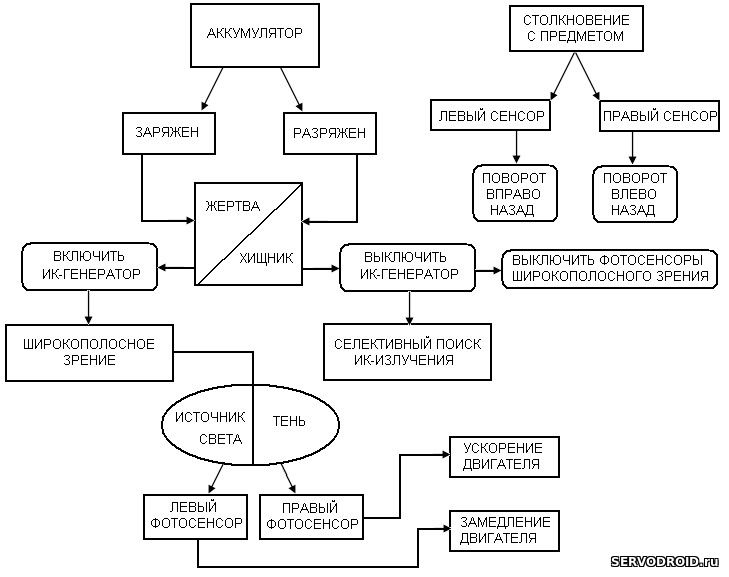
Рис.1 Блок схема организации поведения жука.
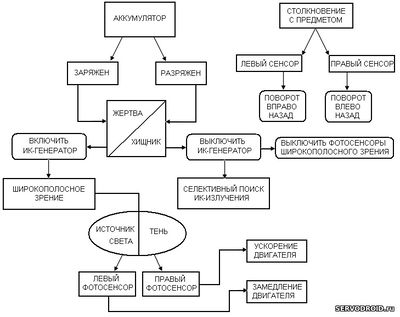
Световые рефлексы сигнальной системы жука.
Два фронтальных светодиода выдают информацию о длительности импульсов поступающих на двигатель от генераторов. По этим светодиодам можно провести реакции на источник света. Двухцветный светодиод на печатной плате интеллект-модуля сигнализирует и состоянии аккумулятора (заряжен - разряжен), то есть о действующем в данный момент поведении “хищник” или ”жертва”. Если светодиод светится зелёным, значит, жук находится в состоянии ”жертва”, при этом аккумулятор заряжен. Если светодиод светится красным, значит, жук находится в состоянии “хищник”, при этом аккумулятор разряжен.
Поведение “хищник-жертва”.
Рефлексивное поведение опирается на два основных состояния насекомого “сыт”, ”голоден”. Эти два состояния кардинально меняют поведение кибернетического жука и являются первостепенными в иерархии старшинства. В модели кибернетического жука состояние “сыт” условно названо “жертва”, а состояние “голоден” названо “хищник”. Это сделано для того, чтобы более точно определить действующее у жука на данный момент рефлексы.
При полностью заряженном источник питания (аккумуляторная батарейка) жук имеет поведение типа “жертва”. При этом работает генератор, который подаёт идентификационные инфракрасные импульсы. Одновременно у жука проявляется рефлекс фототропизма, и он движется за любым источником света, при этом он реагирует на комбинации свет-тень и способен за счёт этого объезжать предметы. Также одновременно работают рефлексы: “шаг жука”, тактильный рефлекс, световой рефлекс сигнальной системы.
Как только жук “проголодается” (система самоконтроля обнаружит падение напряжения на аккумуляторе), его поведение сразу изменится на “хищник”. При этом рефлекс “шаг жука” выключается, так как не позволяет точно следовать за объектом или выходить на зарядную станцию. Жук передвигается стандартным способом с установленной заранее скоростью. Отключаются коммуникационные световые сигналы для экономии энергоресурса. Далее он станет искать зарядную станцию или точно такого же жука как он, но в состоянии “жертва”.
Автоподзарядка от зарядной станции.
Если первой будет найдена зарядная станция, то кибернетический жук подъедет к ней и выключив моторы остановиться на подзарядку. После зарядки он снова придёт в движение, но при этом его поведение измениться и включится рефлекс фототропизма. Кибернетический жук станет, способен различать все объекты, отбрасывающие свет или тень. Он тут же придёт в движение и продолжит своё путешествие по комнате. Любые другие препятствия на пути жука он способен обнаружить тактильными сенсорами и обойти.
Коммуникативные способности.
Кибернетический жук обладает коммуникативной системой и способен взаимодействовать с такими же роботами. Взаимодействие осуществляется на примитивном уровне – в виде преследования и снятии порций энергии у жука в состоянии “жертва” жуком в состоянии “хищник”. При этом жук, находящийся в состоянии “хищник” меняет способ передвижения с пошагового на плавный. Плавное передвижение позволяет ему точно следовать по траектории наведения за другим жуком. Если будет обнаружен такой же, как он жучок (но только в состоянии “жертва”), то он последует за ним и при удачном стечении обстоятельств сможет снять с его аккумуляторов порцию энергии, при этом подзаряжая свои аккумуляторы. Любого другого жука в состоянии “хищник” он не видит.
Шаг жука.
Особый способ передвижения жука шажками позволяет экономить энергию батарейки и приблизить принцип управления силовой частью как у биологического жука. Как и у биологического жука, силовая часть (двигатель) управляется импульсами от нервной системы. А в нашей модели управление осуществляется электрическими импульсами от генераторов. Способ передвижения меняется на плавное движение сразу, как только жук проголодается (разрядится аккумулятор).
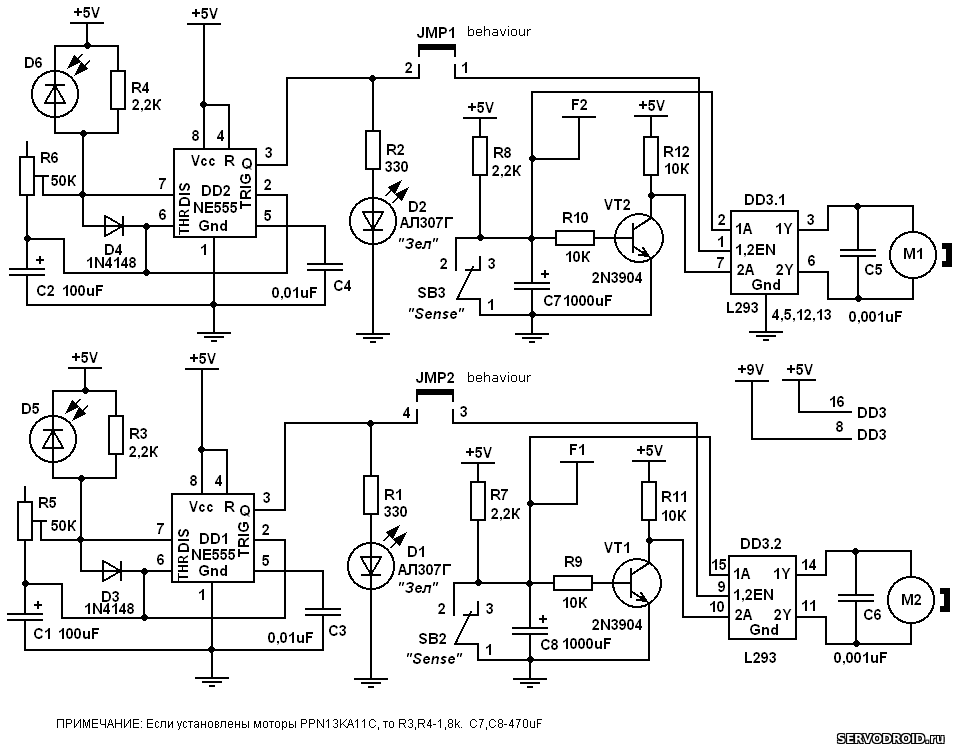
ЭЛЕКТРИЧЕСКАЯ СХЕМА
Электрическая часть размещается на двух платах: основной и интеллект-модуля. Электрическая схема жука построена на основе: семи цифровых микросхем, которые осуществляют обработку информации с датчиков и подают команды на управление двигателями, сигнальной системы, передаёт информацию о функциональном состоянии и осуществляет взаимодействие с другими роботами и зарядной станцией.
Рис 2 Электрическая схема основной платы кибернетической модели жука.
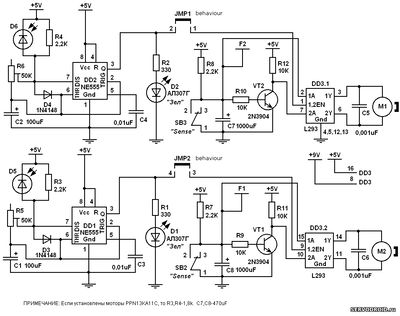
Микросхемы DD1,DD2 – это два независимых управляемых генератора. При изменении сопротивления входных фоторезисторов изменяется длительность импульсов на выходах генераторов. Чем больше освещён фоторезистор, тем меньше длительность импульса на выходе генератора и наоборот. Частоту импульсов генераторов можно выставить с помощью подстроечных резисторов R5,R6. Это даёт возможность установить начальную скорость передвижения, и жук будет или шустрым или медлительным.
На выходы генераторов установлены светодиоды D1,D2. Они включены через токоограничительные резисторы R1,R2. светодиоды позволяют контролировать последовательность импульсов на выходах генераторов.
Двигатели управляются через микросхему DD3. Особенность этой микросхемы в том, что она способна управлять двумя двигателями одновременно, реверсировать направление вращения любого и управлять скоростью вращения двигателей. Именно скоростью вращения двигателей и управляют генераторы.
Для осуществления реверса, при столкновении с предметами, на платформе установлены микропереключатели SB2,SB3. При замыкании которых меняются логические уровни на управляющих входах микросхемы на противоположные. И микросхема переключает двигатели на реверс. При этом происходит поворот в одну из сторон в зависимости от сработавшего микропереключателя. Длительность логических уровней на входе микросхемы DD3 определяется продолжительностью зарядки конденсаторов C7 и C8. Через некоторое время, после того как конденсаторы зарядятся, логические уровни вновь поменяются на исходные, и оси двигателей будут вращаться в прежнем направлении, жук снова поедет вперёд.
На печатной плате интеллект-модуля расположена микросхема-генератор DD7 импульсов с фиксированной частотой 36кГц. Этот генератор автоматически включается, когда аккумуляторы жука заряжены и выключается, когда они разряжены. С такой же частотой работает генератор зарядной станции. На плате интеллект-модуля также установлены высокочувствительные фотомодули IF1,IF2 настроенные на частоту 36кГц, которые и обнаруживают излучение зарядной станции или такого же жука. При обнаружении сигнала фотомодули подают управляющие импульсы на цифровой управляемый усилитель и далее на цифровой переключатель. С цифрового переключателя выполненного на микросхеме сигналы подаются на ШИМ-вход драйвера двигателей.
Для определения подключения к зарядной станции в схеме жука установлен детектор уровня напряжения. Именно он подаёт сигнал на выключение двигателей при подключении к зарядной станции.
Рис.3 Электрическая схема зарядной станции.
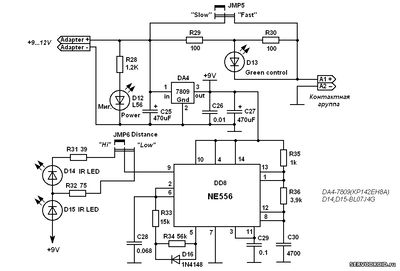
Схема зарядной станции состоит из генератора мощных инфракрасных импульсов с частотой 36кГц (микросхема DD8), систему индикации на светодиодах (D12,D13), стабилизатор напряжения (микросхема DA5) и механических токосъемников (вытравлены на фронтальной части).
Мощный генератор ИК-импульсов – является маячком для жука, он позволяет обнаружить зарядную станцию и подъёхать к ней. Мощность излучения можно устанавливать дискретно “меньше-больше” (Low-Hi). Это необходимо для установки нормального режима обнаружения станции в помещениях разных размеров. Так в меньшем помещении требуется меньшая мощность излучения, а в большем большая мощность. Режимы можно выбрать с помощью переключателя JMP6.
Система индикации выполнена на двух светодиодах. Назначение мигающего светодиода D12 индицировать подключение питания к зарядной станции. Назначение светодиода D13 индикация процесса зарядки и окончания процесса зарядки. Пока светодиод D13 светиться идёт зарядка аккумуляторов жука (если жук пристыковался к контактным площадкам). Если светодиод D13 перестал светиться, значит, зарядка окончена, и аккумулятор полностью заряжен. В схеме предусмотрено два режима зарядки “Slow”/медленный, “Fast”/быстрый. Режимы можно выбрать с помощью переключателя JMP5.
Стабилизатор напряжения преобразует входное напряжение с адаптера в постоянное стабилизированное напряжение 9 вольт. Этим напряжением питается микросхема-генератор DD8, ИК-светодиоды. Стабильность работы всей схемы обеспечивает стабилизатор на микросхеме DA5.
Задача механических токосъёмников осуществление контакта между зарядной станцией и контактами-токосъёмниками жука. Токосъёмники зарядной станции выполнены в виде обширных площадей. Размеры этих токосъёмников позволяют обеспечить надёжный контакт при “промахах” системы наведения жука.
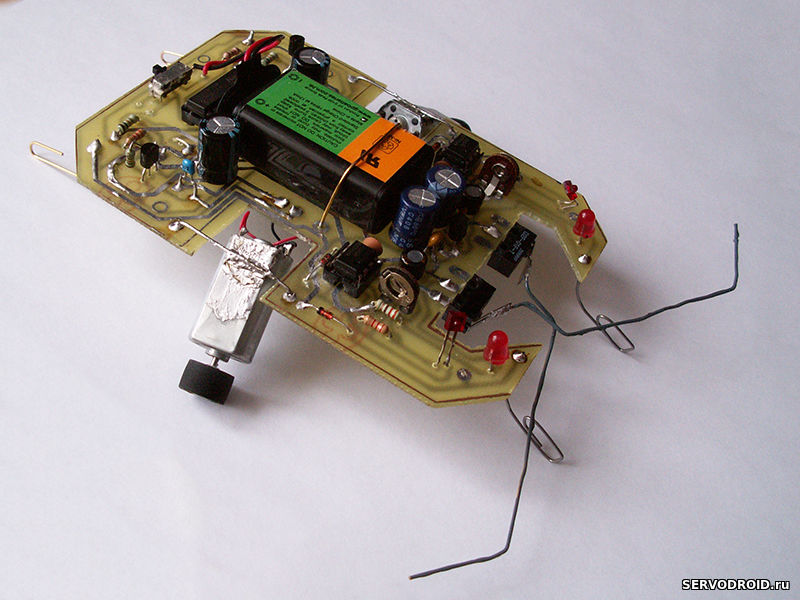
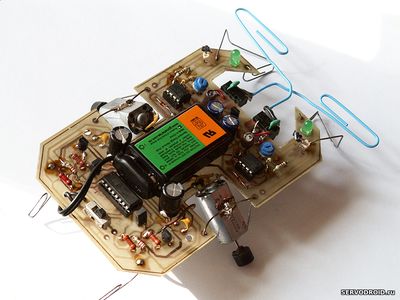
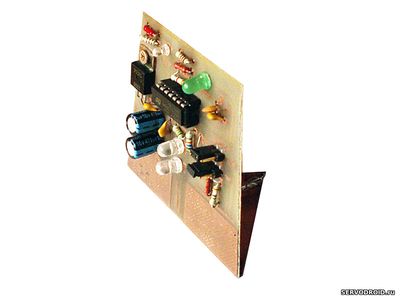
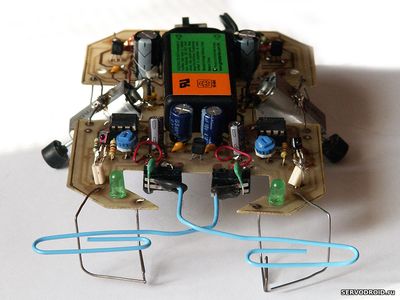
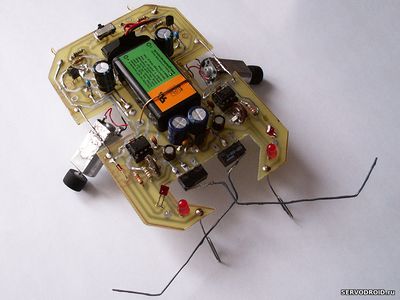
фотографии жука в разных ракурсах, с разными формами тактильных усов-датчиков.
В архиве: монтажный чертёж печатной платы, термоклише для лут-перевода печатной платы.
Архив к статье "жук скарабей" Все чертежи в точных размерах, не изменять, не редактировать! Размер архива 177.4Kb Скачать архив
Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований.
Мы очень рады,
что наши статьи помогут тебе - начинающему робототехнику, освоить эту интереснейшую сферу и прокачать свой скилл в этом направлении. Также хотим отметить, что по данным статьям мы - разработчики сайта SERVODROID проводим занятия в бесплатных кружках робототехники, и нам очень нравится учить и рассказывать что такое BEAM-робототехника всем желающих.
Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;)
Начни общаться на нашем Форуме или Онлайн-чате
[ Стать участником сайта / Авторизоваться ]
|