00:52 ДВУХКАНАЛЬНЫЙ РЕВЕРСИВНЫЙ ДРАЙВЕР УПРАВЛЕНИЯ МОТОРАМИ |
 ДВУХКАНАЛЬНЫЙ РЕВЕРСИВНЫЙ ДРАЙВЕР управления моторами, предназначен для полного управления двумя моторами с использованием шим-модуляции или без неё с помощью микроконтроллера или отладочной платы. Драйвер выполнен по симметричной двухканальной схеме с цифровым управлением. Он позволяет изменять направление вращения оси для двух моторов независимо, изменять скорость вращения в любом направлении с помощь шим-модуляции. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ: _________________________________________ Напряжение питания......+12В; Ток нагрузки.....................до 19-20А; Два независимых канала управления; Независимые входы PWM (ШИМ) и реверс-входы; |
$CUT$
На видео.1 показан робот с установленным драйвером из данной статьи. В демонстрацию входит независимое управление каналами, повороты, движение вперёд-назад и остановка робота.
2.ХАРАКТЕРИСТИКИ И ФУНКЦИОНАЛ
Драйвер моторов предназначен для полного управления двумя моторами с использованием шим-модуляции или без неё с помощью микроконтроллера или отладочной платы. Драйвер выполнен по симметричной двухканальной схеме с цифровым управлением. Он позволяет изменять направление вращения оси для двух моторов независимо, изменять скорость вращения в любом направлении с помощь шим-модуляции. Схемотехнически драйвер состоит из управляющей цифровой части, драйверов полевых транзисторов и двух симметричных мостов выполненных на мощных полевых транзисторах. Расчётная нагрузочная способность драйвера до 19A.
На фото.1 показана плата драйвера. На фото.2 драйвер установленный на модель робота управляемого через ноутбук.
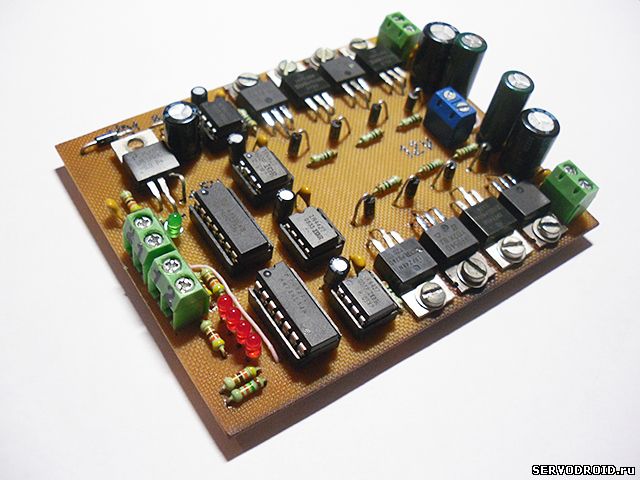
фото.1
|
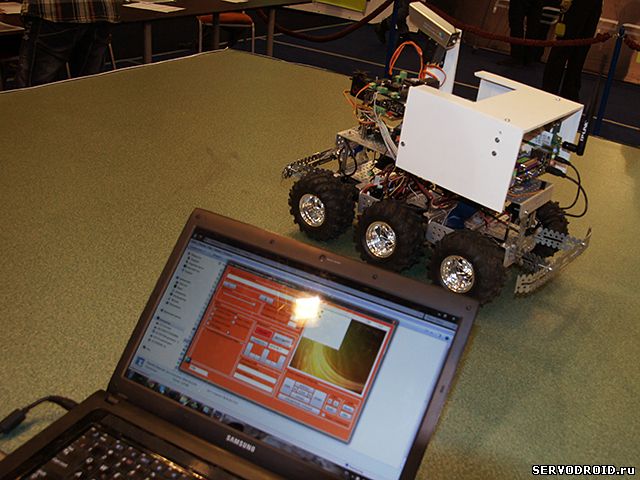
фото.2
|
Табл.1.Технические характеристики.
|
Параметр |
Данные |
Примечание |
|
Напряжение питания |
12V |
схема драйвера питается от стабилизатора напряжения +5В получаемого от входящего напряжения +12В |
|
Индикация напряжения питания |
1 светодиод |
светодиод зелёного цвета свечения |
| Индикация входных сигналов | 4 светодиода | к каждому входу подключены светодиоды красного цвета свечения |
|
Количество коммутируемых моторов |
2 |
ток нагрузки не более19-20А |
|
Входы PWM (ШИМ) сигнала |
2 |
2 канала раздельно |
|
Входы Frv/Rev (вперёд-назад) |
2 |
2 канала раздельно |
|
Размеры основной печатной платы |
100x80мм |
Фигурная форма |
3.ПРИНЦИП РАБОТЫ, НАЗНАЧЕНИЕ ВХОДОВ УПРАВЛЕНИЯ.
Управление драйвером возможно через два разъёма XT2,XT3. Если сориентировать печатную плату разъёмами на себя, то разъём XT2 будет слева, а XT2 справа. Через разъём XT2 осуществляется управление левым каналом (VT1,VT2,VT5,VT6) и соответственно мотором M1. Через разъём XT3 осуществляется управление правым каналом (VT3,VT4,VT7,VT8) и соответственно мотором M2.
Каждый из разъёмов двухсекционный и имеет нанесённую на корпус маркировку из цифр 1 и 2. Цифрой 1 помечен вход установки вызывающий изменение направления вращения вала мотора. При подаче лог.1 вал мотора будет вращаться в одну сторону, при подаче лог.0 в другую. Вращение в ту или иную сторону будет происходить только в случае, если на входе 2 разъёма установлена лог.1.
Цифрой 2 помечен вход для подключения шим-сигнала. Изменяя ширину импульса на данном входе можно изменять скорость вращения вала мотора. Чтобы остановить вращения вала мотора необходимо подать шим сигнал с нулевым уровнем. Если использование шим-сигнала не планируется, то управление по входу 2 можно осуществить логическими уровнями. Например, установка лог.1 на входе 2 вызовет вращение вала мотора на максимальной скорости. Установка лог.0 на входе 2 вызовет остановку вращения вала мотора.
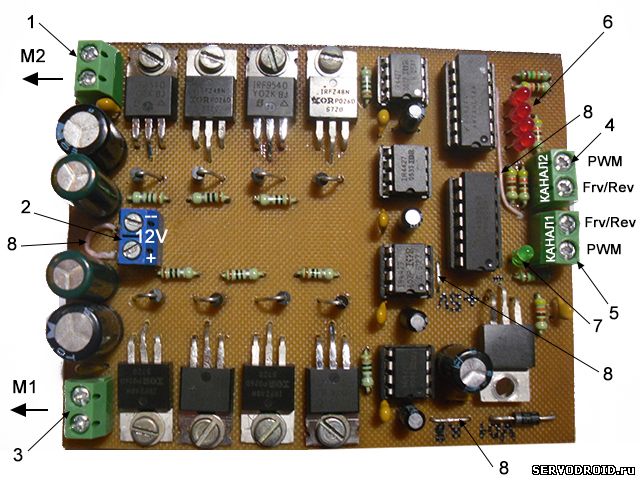
фото.3
|
Функциональное назначение компонентов
1. Разъём XT5 выходы подключения мотора M2. 2. Разъём XT1 подключение источника питания напряжением 12 вольт. 3. Разъём XT4 выходы подключения мотора M1. 4. Разъём XT3 вход второго канала. Реверс направления вращения вала мотора M2 и вход ШИМ-сигнала (PWM). 5. Разъём XT2 вход первого канала. Реверс направления вращения вала мотора M1 и вход ШИМ-сигнала (PWM). 6. Светодиоды красного цвета свечения сигнализирующие поступление высокого уровня на каждый из входов. 7. Светодиод зелёного цвета свечения сигнализирующий подключение источника питания. 8. Перемычки (выполнены монтажным проводом). Примечание.1. Вместо шим-сигнала можно подключить положительный потенциал (+5в), но в этом случае регулировать скорость вращения вала мотора будет невозможно. |
Для торможения не имеет значения, какой логический уровень на входе 1. Достаточно выставить на входе 2 разъёма логический ноль. Если требуется не плавное, а экстренное резкое торможение, то можно использовать следующий способ. На короткое время программно изменить направление вращения вала мотора, затем отключить моторы. Такой подход вызовет мгновенное торможение.
Принципиальная электрическая схема.
Двухканальный драйвер моторов выполнен на основе мощных полевых транзисторов и четырёх микросхем-драйверов. Мощные полевые транзисторы имеют большую ёмкость затвора. Чтобы эффективно переключать такие транзисторы нужны специальные драйверы, например микросхемы IR4427 которые использованы в схеме. Входы микросхем драйверов DA2,DA3,DA4,DA5 подключены к разъёмам XT2.XT3 через логические элементы микросхем DD1,DD2. Элементы этих микросхем правильно распределяют поступающие на разъёмы XT2,XT3 сигналы логического уровня. Выходы микросхем-драйверов DA2,DA3,DA4,DA5 обладают повышенной нагрузочной способностью и подключены к затворам мощных полевых транзисторов VT1-VT8. Питание всей схемы осуществляется через стабилизатор с малым падением напряжения DA1 (LM2940-5).
|
Рис.1 клик для просмотра в полном размере |
Для контроля все сигналы на входах 1 и 2 двух разъёмов XT2,XT3 отображаются на светодиодах красного цвета свечения. Если на любом из входов сигнал высокого уровня (лог.1), то это вызывает свечении соответствующего светодиода. Если на любом из входов сигнал низкого уровня (лог.0), то светодиод не светиться. Зелёный светодиод, расположенный на плате драйвера индицирует наличие напряжения питания +5 вольт поступающего на цифровые микросхемы DD1,DD2 (74HC00,74HC14).
Для отладки программы управления драйвером не обязательно подключать моторы, достаточно проследить прохождение команды по включению соответствующего светодиода. Логическая единица соответствует зажжённому светодиоду. Логический ноль соответствует погашенному светодиоду.
Для разъёма XT2, лог.1 на входе 1 светиться HL1, лог.1 на входе 2 светиться HL2. Для разъёма XT3, лог.1 на входе 1 светиться HL3, лог.1 на входе 2 светиться HL4. На печатной плате светодиоды расположены по порядку HL1-HL4 (если считать от центра к краю платы) .
При включении одного или двух моторов аккумуляторы испытывают значительную нагрузку, так как через них протекает большой ток. Чтобы обеспечить первичный импульс тока на обмотке моторов и разгрузить аккумуляторы, на плате драйвера установлены конденсаторы большой ёмкости C2,C13,C14,C15 (1500мкф). Их емкость должна коррелировать с допустимым током нагрузки для используемых моторов. |

4.ДЕТАЛИ И МАТЕРИАЛЫ.
Табл.1.Список радиокомпонентов.
| ПОЗИЦИЯ | НАИМЕНОВАНИЕ | ПРИМЕЧАНИЕ | КОЛ-ВО |
| DA1 | LM2940-5 | замена 7805 | 1 |
| DA2-DA5 | IR4427 | 4 | |
| DD1 | 74HC00 | 1 | |
| DD2 | 74HC14 | 1 | |
| VT1,VT3,VT5,VT7 | IRF9540 | 4 | |
| VT2,VT4,VT6,VT8 | IRFZ48N | 4 | |
| VD1 | 1N5819 | 1 | |
| HL1-HL4 | L3014RD | светодиоды красного цвета свечения в корпусе диаметром 3мм | 4 |
| HL5 | L3014GD | светодиод зелёного цвета свечения в корпусе диаметром 3мм. | 1 |
| VD2-VD9 | 1N4007 | 8 | |
| C1,C3,C5,C7,C9,C11 | 0,1мкф | 6 | |
| C2,C13,C14,C15 | 1500мкф16в | 4 | |
| C4 | 470мкф10в | 1 | |
| C6,C8,C10,C12 | 10мкф16в | 4 | |
| C16,C17 | 0,01мкф | 2 | |
| R1,R2 | 15кОм | 0,125Вт | 2 |
| R3-R7 | 430 Ом | 0,125Вт | 5 |
| R8 | 10 Ом | установить перемычку! | 1 |
| R9-R16 | 10 Ом | 8 | |
| XT1-XT5 | клеммники винтовые двухсекционные, шаг 5мм | 5 |
5.ОБЩИЕ РЕКОМЕНДАЦИИ ПО ВКЛЮЧЕНИЮ ДРАЙВЕРА
Чтобы упростить работу с драйвером, избежать неприятных ситуаций далее приводятся рекомендации прикладного порядка. Драйвер рассчитан на работу в составе программного комплекса, поэтому нужно учитывать не только конструктивные особенности, но и рекомендации по программному коду.
- Перед подключением драйвера проверить уровень заряда аккумуляторов, напряжение должно быть не менее 12 вольт.
- При эксплуатации драйвера не допускайте короткого замыкания на выходах для подключения моторов. В противном случае из-за больших токов в выходном транзисторном мосте сгорят транзисторы IRF9540 как более низкоточные по сравнению с IRFZ48N.
- Для повышения напряжения на затворах мощных транзисторов вместо резистора R8 (сопротивлением 10 Ом) на печатной плате установлена перемычка.
- Плата контроллера также имеет встроенный источник питания. Если +5в с платы контроллера приводит к не правильной работе драйвера, то следует отключить внутренний источник питания драйвера. Для этого необходимо найти стабилизатор LM2940 на печатной плате. Затем выпаять две ножки первую и третью по счёту слева. Стабилизатор будет отключен. Затем необходимо подключить питание +5 вольт к плате драйвера с платы контроллера через отверстие для третьего вывода стабилизатора. На печатной плате драйвера отверстие помечено +5V.
- Если продолжительные включения драйвера происходят к сильному разогреву корпуса, какого либо транзистора, то рекомендуется установить радиатор решётчатого типа на металлический контакт стока транзистора и зафиксировать его винтом.
- Все силовые соединения с моторами и источником питания по шине +12В выполняйте только толстым многожильным медным проводом, рассчитанным на большие токи.
|
ВНИМАНИЕ! Мощные полевые транзисторы имеют большую ёмкость затвора, заряд не успевает рассасываться при переключении. Поэтому до смены направления вращения вала мотора (ов) задайте программно небольшую паузу. И только после этого изменяйте состояние входа Frv/Rev для каждого из каналов. Иначе в драйвере моста на полевых транзисторах потечёт сквозной ток приводящий к короткому замыканию! |
Архив к статье "двухканальный реверсивный драйвер" пароль не требуется. Все чертежи в точных размерах, не изменять, не редактировать! Размер архива 1,1Mb Скачать архив
Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим!
автор Алексей Высоковольтный www.servodroid.ru
© Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
| Всего комментариев: 8 | |


| |


