00:56 LineBot - Программируемый | ||
 LINEBOT Atmega8 - робот трейсер на микроконтроллере. Использование микроконтроллеров в робототехнике уже повсеместное явление. Такие роботы более функциональны и технологичны, обладают большими возможностями и, более гибки в настройках. Представляем робот для прохождения трассы, на микроконтроллере atmega8. Проект включает чертежи электрических и печатных плат, описание принципов работы. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ --------------------------------------------------------------------- Напряжение питания.............................3,7 вольт Кол-во моторов.....................................2 Кол-во сенсоров трассы.........................3 Сигнальная система...............................+ Настройка ручная и автоматическая.........+ |

$CUT$
***
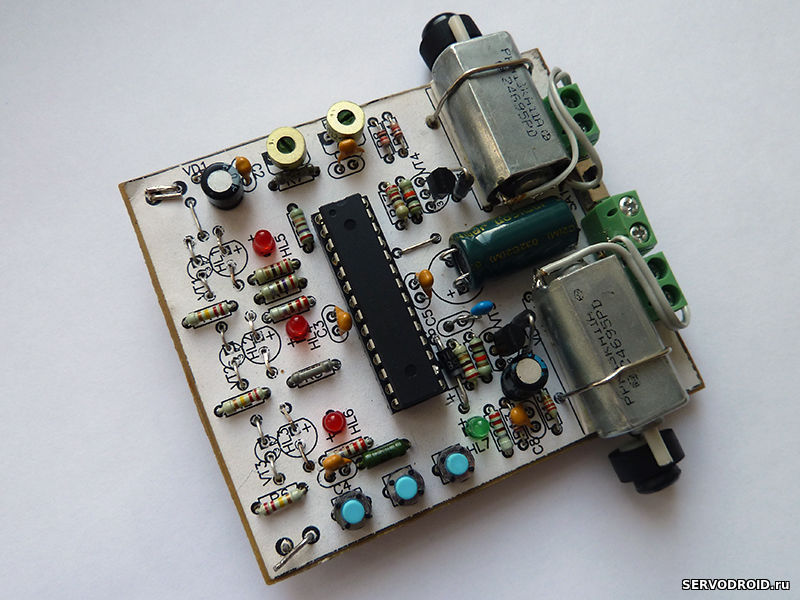
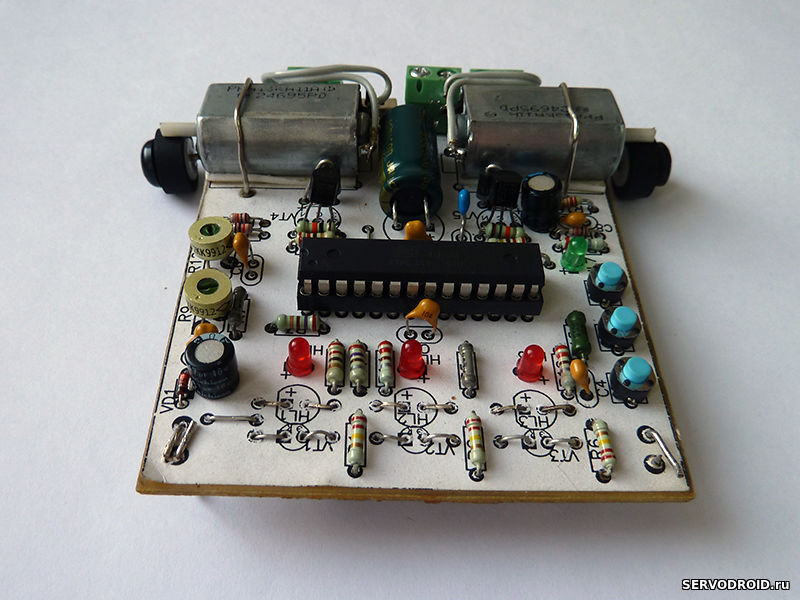
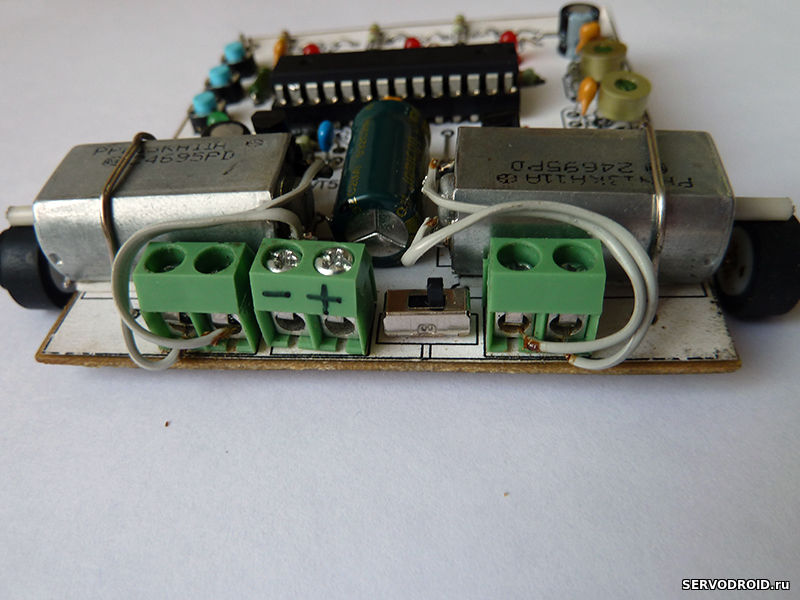
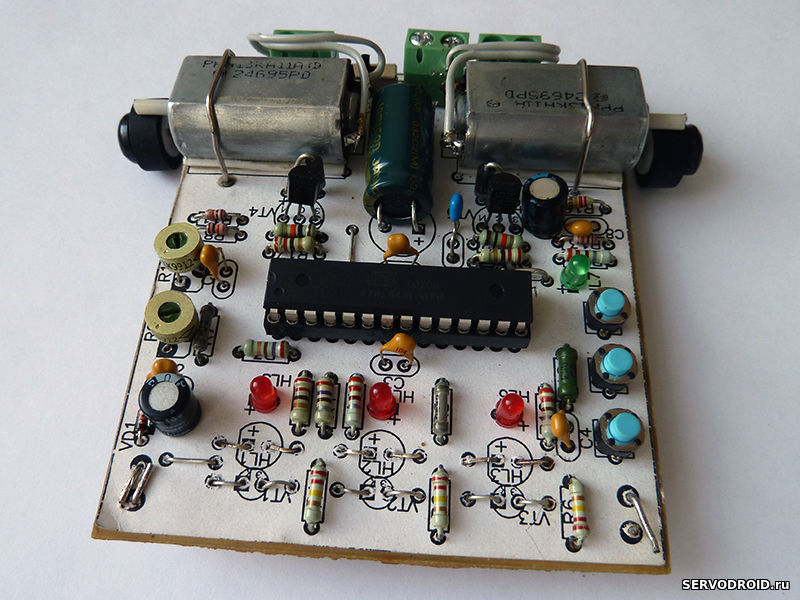
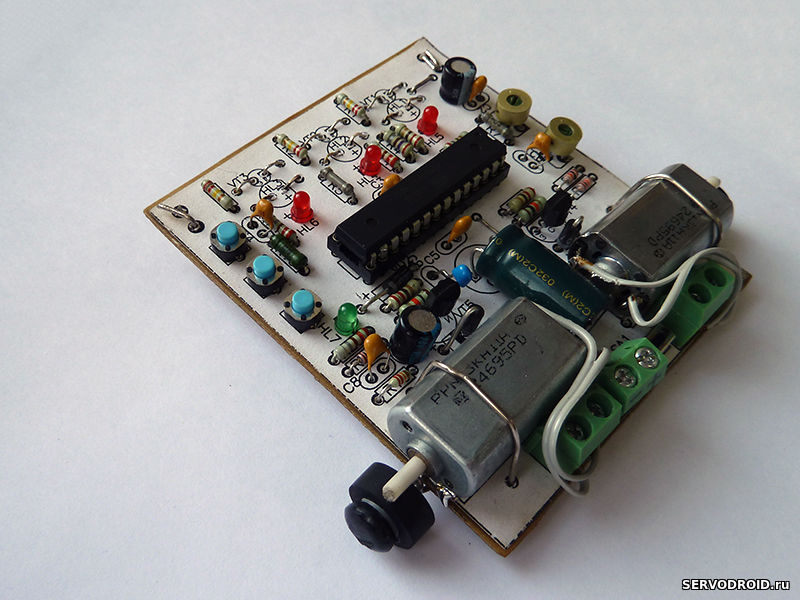
фото.1-2 робот в разных ракурсах.
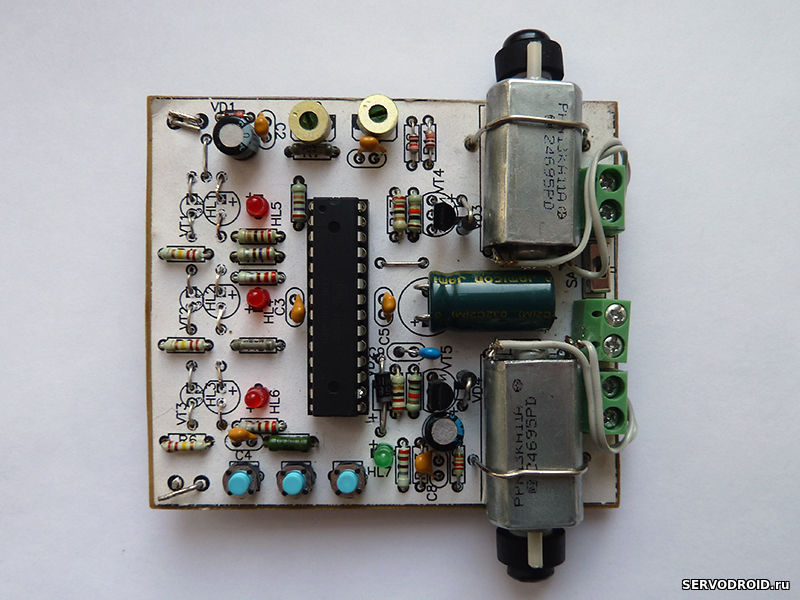
КОНСТРУКЦИЯ
Конструктивно робот выполнен на основе печатной платы с установленными радиокомпонентами и моторами. Контроль трассы осуществляется с помощью трёх фототранзисторов, сигнал с которых анализируется микроконтроллером. Подсветка трассы осуществляется тремя инфракрасными светодиодами. Каждый из ик-светодиодов расположен рядом с фототранзистором, на который должно попасть отражённое от трассы излучение.
На печатной плате установлено три кнопки. Одна из которых Reset аппаратно сбрасывает программу в начало, перезапуская микроконтроллер. Вторая кнопка Setup запускает программу считывания уровней отражений от трассы. Третья кнопка Start запускает робота на трассе.
Предусмотрено два регулятора на подстроечных резисторах. Первый управляет общей чувствительностью всех фототранзисторов к уровню отражённого излучения от трассы. Второй регулятор управляет скоростью моторов, изменяя скорость передвижения по трассе.
В качестве сигнальной системы установлены три светодиода. С их помощью удобно настраивать робота перед стартом. Предусмотрена защита от неправильного подключения источника питания (батарейки).
ХАРАКТЕРИСТИКИ И ФУНКЦИОНАЛЬНОСТЬ
Далее приводиться назначение основных компонентов расположенных на печатной плате робота.
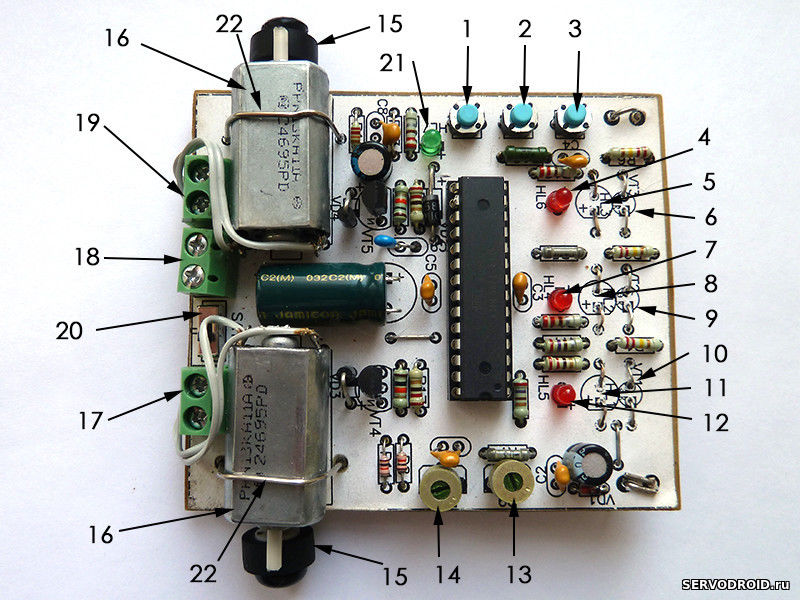 |
1.Кнопка Start запуск робота а трассе. |
ПРИНЦИП РАБОТЫ
Электрическая схема показана на рис.1. В качестве источника питания используется литиевая батарейка от сотового телефона напряжением 3,7в. Следует обратить внимание, что в схеме использован микроконтроллер Atmega8L-8, который рассчитан на диапазон напряжений 2,7-5,5в. Другой тип микроконтроллера может не подойти.
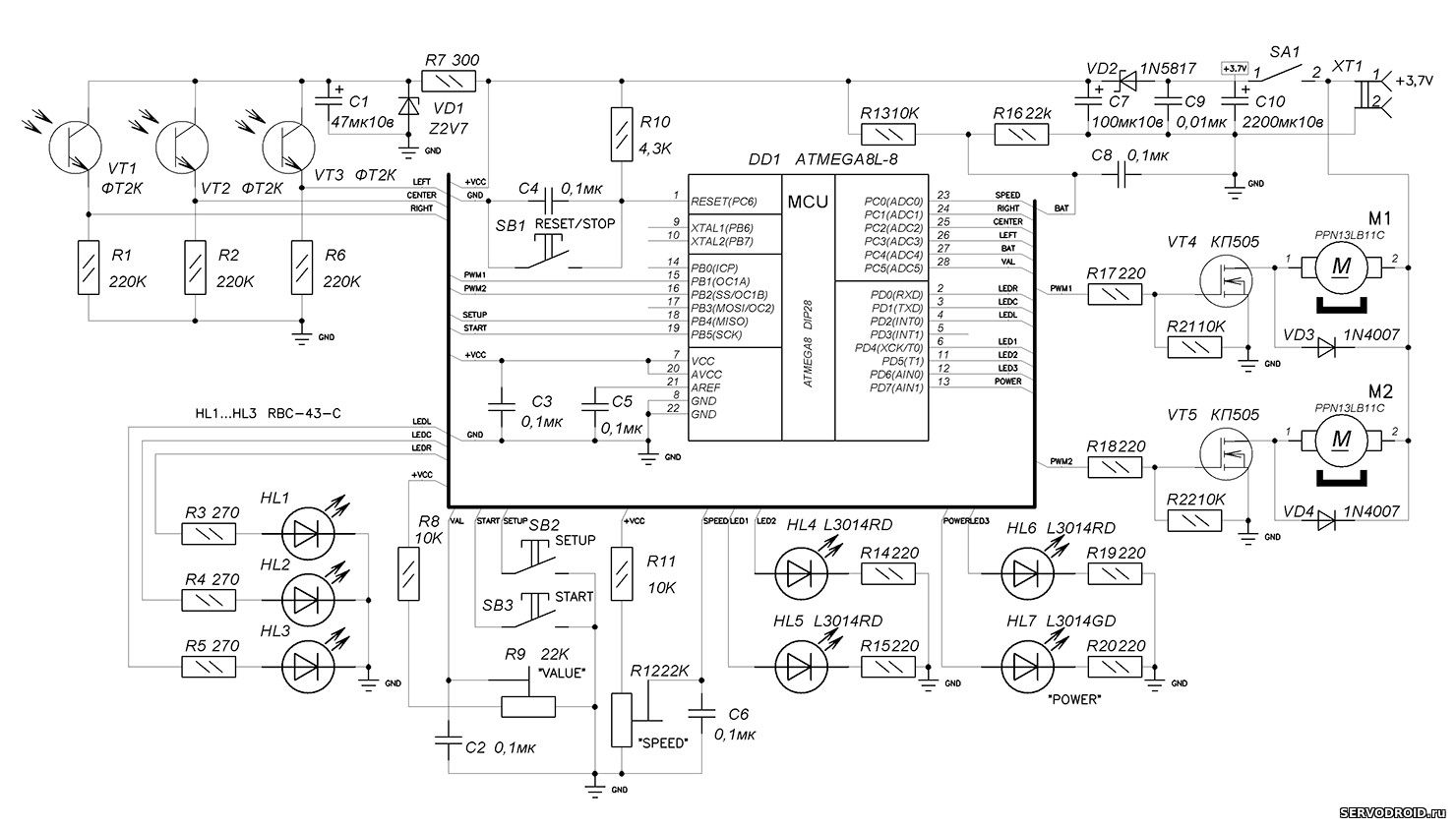
После включения, через нормально замкнутые контакты выключателя SA1 напряжение поступает на конденсаторы C9,C10. Большая ёмкость конденсатора C10 обеспечивает первичный пусковой ток на двигатели, а конденсатор C9 защищает от высокочастотных помех.
Затем через диод шоттки VD2 напряжение поступает на конденсатор C7 и делитель на резисторах R13,R16. Сопротивление резисторов делителя подобрано таким образом, чтобы в средней точке напряжение соответствовало напряжению ионистора микроконтроллера DD1. Делитель на резисторах R13,R16 используется для контроля напряжения литиевого аккумулятора.
Так как разрядка литиевого аккумулятора ниже уровня 3 вольт нежелательна, то этот порог контролируется микроконтроллером. Как только напряжение снизиться ниже 3 вольт, светодиод HL7 “power” будет периодически вспыхивать, сигнализируя о необходимости подзарядить аккумулятор.
После включения следует установить робота точно на трассу. При этом фототранзистор VT2 расположенный в центре под печатной платой должен быть над чёрной полосой, а два других по краям, точно над белой поверхностью трассы. Затем необходимо кратковременно нажать кнопку SB2 “setup”. Программа микроконтроллера проанализирует уровни сигналов с фототранзисторов, запомнит их и перейдёт из режима настройки в режим готовности. Процесс анализа и автоподстройки длиться не более секунды. Затем можно нажать кнопку “start: и робот поедет по линии.
Светодиоды HL4,HL5,HL6 предназначены для сигнализации контроля трассы. Логика их работы напрямую зависит от положения робота на трассе.
Если робот правильно расположен на трассе, будут светиться все три светодиода. При неправильном расположении светодиоды гаснут. Расшифрую более подробно алгоритм. Пока фототранзистор VT2 расположен над чёрной линией трассы будет гореть светодиод HL4. Если робот съезжает с трассы и фототранзистор VT2 оказывается над белой поверхностью трассы, то светодиод HL4 гаснет.
Пока фототранзисторы VT1 и VT3 расположены над белыми поверхностями трассы, светодиоды HL5,HL6 будут светиться. Как только робот съезжает в ту или иную сторону с трассы, светодиоды реагируют вспышками или гаснут над чёрной линией трассы.
Для питания фототранзисторов VT1-VT3 на схеме предусмотрен отдельный стабилизатор напряжения, выполненный на элементах C1,VD1,R7. Задача стабилизатора уменьшить влияние пульсаций тока общей цепи питания на фототранзисторы. На выходе стабилизатора вырабатывается напряжение 2,7в. Это напряжение поступает на коллекторы фототранзисторов VT1-VT3.
Подсветка трассы осуществляется с помощью трёх инфракрасных светодиодов. Эти светодиоды управляются микроконтроллером напрямую. Для экономии источника питания светодиоды никогда не включаются одновременно. Управляющая программа их включает веером, по очереди. Скорость переключения велика, и отклики отражённого излучения программа успевает проанализировать достаточно быстро.
Для защиты от внешнего излучения используется специальный алгоритм, суть которого в следующем. Сигнал с фототранзистора анализируется только в момент включения светодиода, если бит 1 появляется на выходе порта управляющем светодиодом. Иначе напряжение на данном фототранзисторе игнорируется, не анализируется. Также будет игнорироваться сигнал с выхода фототранзистора, если включен “чужой” светодиод, то есть светодиод который не находиться напротив.
В тактах поочерёдного переключения инфракрасных светодиодов есть пауза. В этот момент ни один из светодиодов не излучает. Но сигнал со всех трёх фототранзисторов снимается, преобразуется, и заноситься в индивидуальные переменные. Это значение определяется как шум, помеха от внешнего источника света. При дальнейших измерениях это значение вычитается из полезного сигнала, повышая помехоустойчивость к посторонним засветкам.
Полезный сигнал снимается с эмиттеров фототранзисторов VT1-VT3. Если фототранзисторы не освещены, то на эмиттерах любого из них отрицательный потенциал. Этот сигнал поступает на входы PC1,PC2,PC3 микроконтроллера. К указанные порты программно подключены на вход и притом с преобразованием входного аналогово сигнала в цифровой. Поэтому при изменении потенциала на этих портах в переменных будут получены конкретные числовые значения. Пределы этих значений и будут определять реакцию робота на трассе.
Кнопка SB1 “reset” аппаратно сбрасывает микроконтроллер в исходное состояние. Программа перезапускается, а робота следует установить на трассу.
Подстроенный резистор R9 регулирует уровень чувствительности всех фототранзисторов к ик-излучению. Таким образом, если необходимо, можно ручной настройкой уменьшить или увеличить чувствительность. Происходит это следующим образом. При вращении ручки подстроечного резистора R9 изменяется потенциал на его среднем выводе. Этот потенциал стабилизируется на верхней обкладке конденсатора C2 и снимается с порта PC5. Программно анализируется уровень, и результат копируется в переменную, значение которой определяет пороговый уровень для реакции на сигнал с фототранзисторов.
Для управления моторами M1,M2 используются полевые транзисторы VT4,VT5. Так как сопротивление открытых каналов полевых транзисторов минимально, то и греться они практически не будут. Управление осуществляется через порты микроконтроллера PB1,PB2. И это не случайный выбор. Особенность портов в том, что каждый из них имеет аппаратный шим, который легко подключить программно и управляя длительностью импульса изменять скорость вращения вала мотора и следовательно скорость передвижения или поворотов модели робота.
Подстроечный резистор R12 регулирует скорость вращения валов моторов M1,M2 в ручном режиме. Данная настройка позволяет исключить ошибки автоматической настройки и повысить или понизить скорость передвижения робота по трассе, если это необходимо. Потенциал, полученный на среднем выводе подстроечного резистора поступает на программно настроенный вход микроконтроллера PC0. Полученное значение заноситься в переменную. Далее значение переменной нормируется. Изменение этого числа при вращении ручки подстроечного резистора прямо пропорционально изменяет длительность импульсов шим на программно настроенных выходах PB1,PB2. Изменяется время нахождения транзисторов VT4,VT5 в открытом или закрытом состоянии и соответственно скорость вращения валов моторов M1.M2.
В качестве алгоритма управления моторами был взят за основу ПИД-метод. Именно такой алгоритм позволяет цепко держать трассу, и получить приличную скорость передвижения по ней.
ПИД - представляет собой адаптивный алгоритм контроля с обратной связью, в нашем случае моторов.
Назначение диодов VD3,VD4 защита транзисторов VT4,VT5 от обратного потенциала с обмотки моторов M1,M2 в моменты выключения. Диод VD2 защищает микроконтроллер от неправильного подключения (переплюсовки) источника питания. Сопротивления резисторов R17,R18 не должны быть меньше указанных на схеме и таблице, но с большим номиналом использовать допустимо.
Резистор R10 и конденсатор C4 при включении питания вырабатывают короткий отрицательный импульс сброса микроконтроллера на выводе 1 (RESET). В принципе в корпусе микроконтроллера уже есть подобная цепочка. Но данный вариант подключения является стандартом.
ДЕТАЛИ И МАТЕРИАЛЫ.
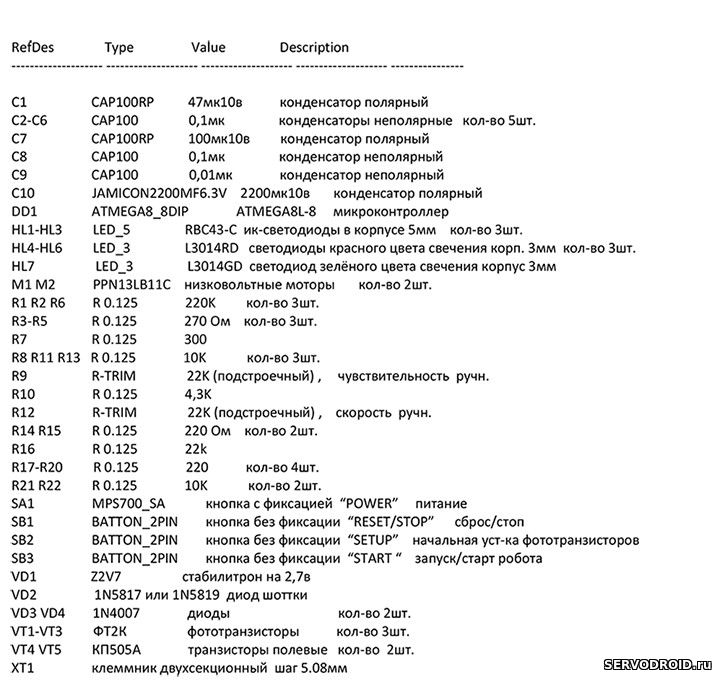
Печатная плата изготовлена из односторонне фольгированного листа стеклотекстолита толщиной 1-1,5мм. Размеры печатной платы на чертежах в архиве. Список радиокомпонентов приведён в таблице.1. Ссылка на архив с чертежами и разводкой под ЛУТ размещена в конце статьи! Всё чертежи в архиве в точных размерах. Не редактировать, не масштабировать!
Табл.1.Список радиокомпонентов.
ИНСТРУКЦИЯ ПО СБОРКЕ.
Для правильной сборки придерживайтесь инструкций по сборке. Редактировать, масштабировать чертежи в архиве нельзя, так как все чертежи архива в точных размерах. Распечатайте монтажный чертёж на листе белой офисной бумаги формата А4. Для лут-перевода распечатайте термоклише с помощью лазерного принтера (разрешение должно быть 600dpi) на листе глянцевой бумаги.
1.Монтаж радиокомпонентов.
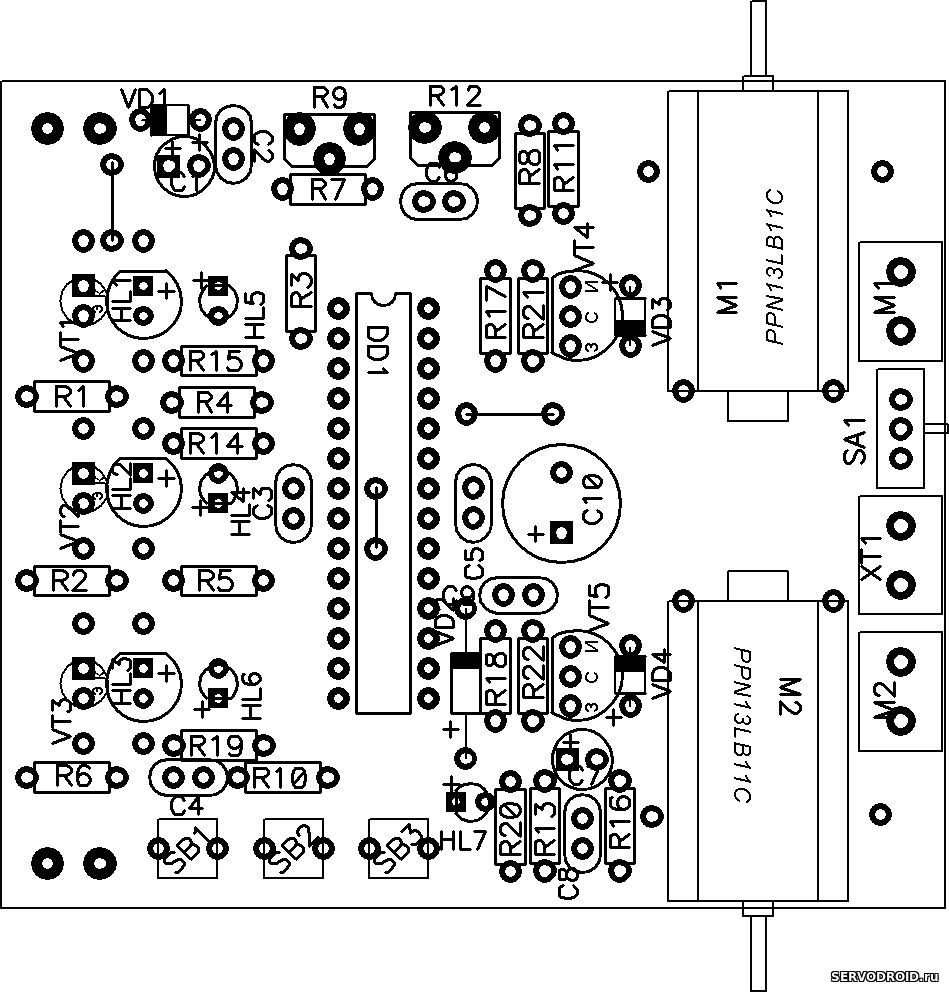
После изготовления печатной платы проверьте токоведущие дорожки на возможные замыкания. Приклейте к печатной плате монтажный чертёж так, чтобы все отверстия были совмещены. Затем выполняйте монтаж всех указанных в таблице 1 радиокомпонентов. Первыми выполниет монтаж резисторов и конденсаторов, затем транзисторов. Далее клеммники для подключения моторов и питания. Моторы устанавливают после того, как все радиокомпоненты напаяны на плату.
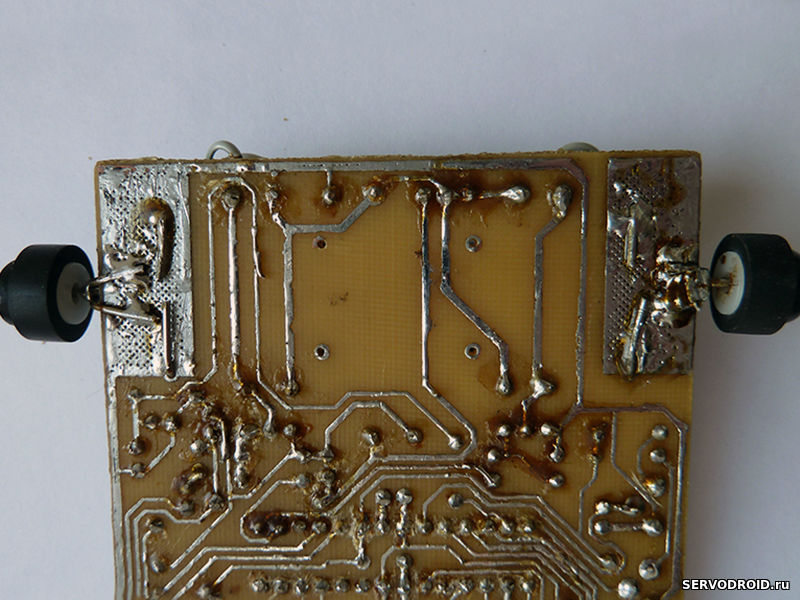
2.Монтаж передних опор и инфракрасных светодиодов
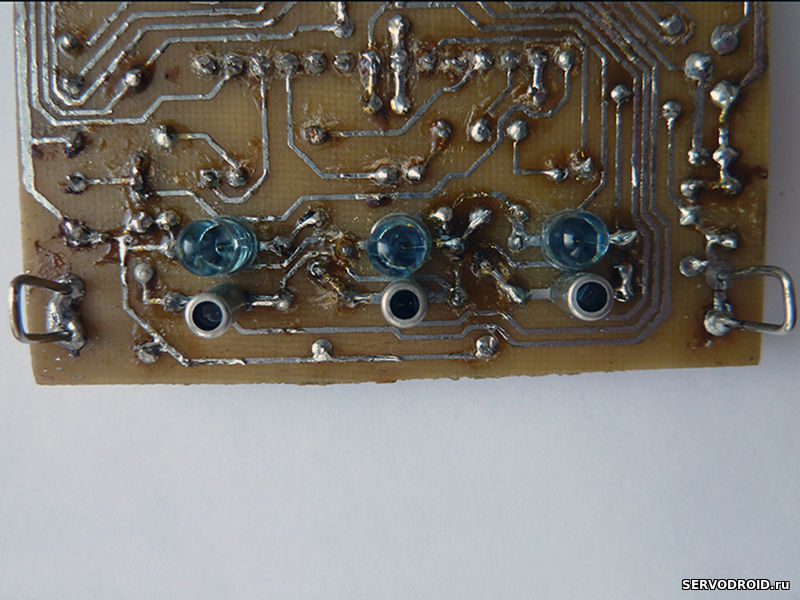
Передние опоры выполнены из согнутой металлической канцелярской скрепки. Скрепку припаивают непосредственно на площадки печатной платы по краям (см.фото). Вполне допустимы и другие варианты опор.
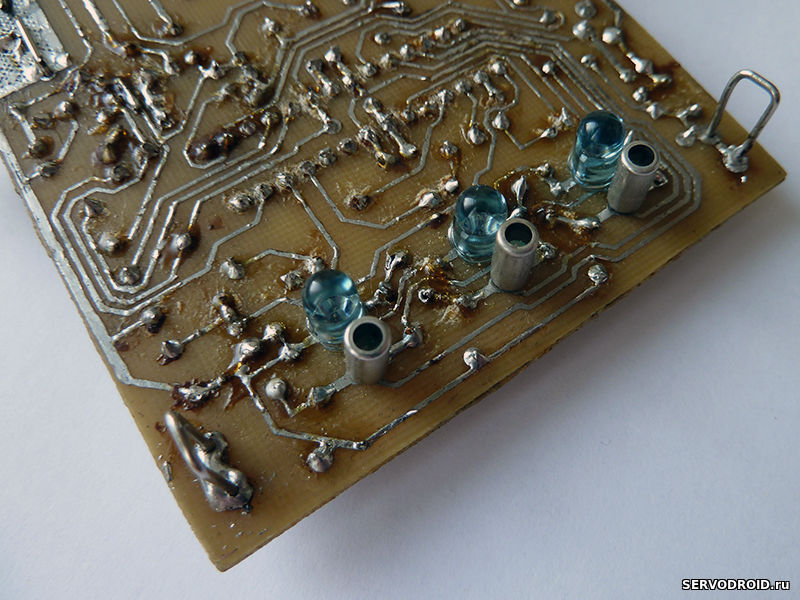
Со стороны токоведущих дорожек необходимо установить и запаять инфракрасные светодиоды. Чтобы это с делать проденьте выводы светодиодов через рядом расположенные отверстия и выведите наоборот (см. фото и монтажный чертёж).
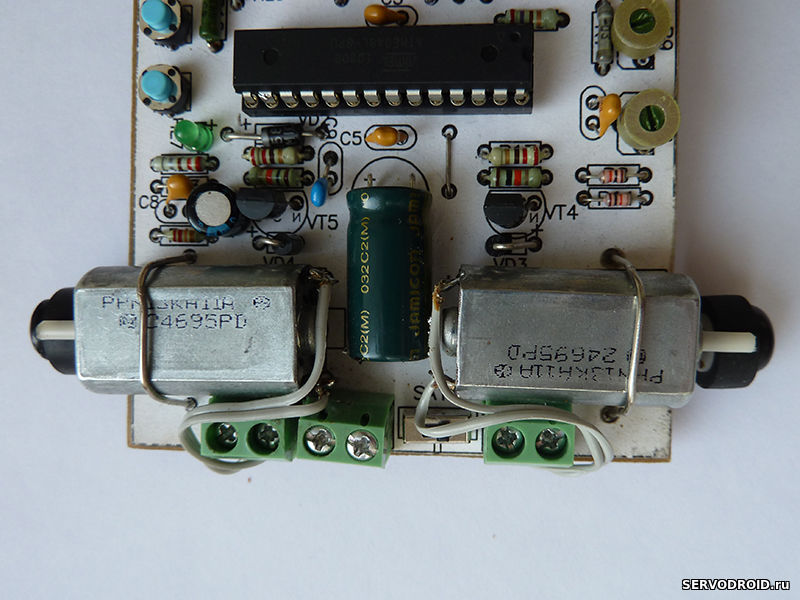
3.Монтаж моторов
Из двустороннего скотча вырежьте прямоугольник и приклейте его к поверхности любого мотора. Тоже проделайте и для второго мотора. Установите моторы на позициях отмеченных на монтажном чертеже. Выгните из металлических скрепок две П-образные скобы.ю. Зачистите скобы на концах. Проденьте скобы через отверстия печатной платы в обозначенных местах (см. фото). Подтяните плоскогубцами, выгните концы и припаяйте сот стороны токоведущих дорожек. Скобы должны плотно прижимать моторы на позициях.
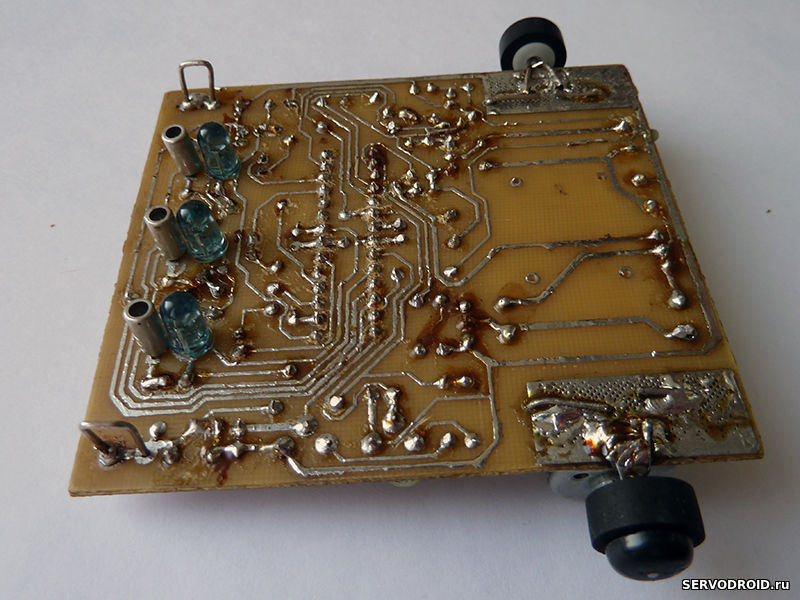
4.Монтаж колёс.
В качестве колёс использованы резиновые ролики диаметром 12мм. Для сцепления на вал мотора необходимо надеть небольшую трубочку. Сами ролики крепят на позициях показанных на фото со стороны токоведущих дорожек. Ось колеса-ролика изготовлена из металлической канцелярской скрепки.
Зачистите и залудите скрепку в области крепежа удерживая плоскозубцами. Затем оденьте ролик и пережимая плоскогубцами между роликом и областью монтажа припаяйте к печатной плате на позициях ориентируясь по фото и рисунку монтажного чертежа.
на фото ниже показан монтаж клеммников, моторов и колёс.
ЗАПУСК РОБОТА.
После сборки установите робот на трассу. Фототранзистор расположенный в центре печатной платы должен находиться над чёрной полосой трассы. А фототранзисторы по бокам должны находиться над белыми участками трассы. Включите питание и кратковременно нажмите кнопку Setup. После того как будут получены данные отражений с трассы робот готов (не более 1 сек). Теперь можно нажимать кнопку Start.
на фото показан робот в сборке.

В архиве: монтажный чертёж печатной платы, термоклише для лут-перевода печатной платы.
Все чертежи в точных размерах, не изменять, не редактировать! Размер архива 64.0Kb Скачать архив
Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований.
Мы очень рады,
что наши статьи помогут тебе - начинающему робототехнику, освоить эту интереснейшую сферу и прокачать свой скилл в этом направлении. Также хотим отметить, что по данным статьям мы - разработчики сайта SERVODROID проводим занятия в бесплатных кружках робототехники, и нам очень нравится учить и рассказывать что такое BEAM-робототехника всем желающих.
Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;)
Начни общаться на нашем Форуме или Онлайн-чате
[ Стать участником сайта / Авторизоваться ]
| Всего комментариев: 1 | |
|
| |
