|
Ралли
|
|
Администраторы
3417 сообщений
Мужчина
|
Параллельно с роботом для лабиринта Я приступил к созданию робота для "Ралли по коридору". Правила таковы: 1. В ралли участвуют четырехколесные автомобили с задним (или передним) приводом и рулевыми передними колесами.
2. Размер робота не должен превышать 50х50х50 см. Вес – не более 2 кг.
3. Робот должен быть полностью автономным. Требования к трассе: 1. Трасса для движения робота представляет собою извилистый коридор шириной от 1 до 2 м с возможными неровностями стен (выступы и проемы до 10 см глубиной) и препятствиями на полу в виде «лежачих полицейских» высотой до 5 см с углом наклона до 35 градусов.
2. Для формирования стенок трассы могут быть использованы коробки, положенные на бок парты или физкультурные скамьи высотой не менее 20 см.
3. Возможны щели шириной до 7 см в стыках между стенками.
4. Длина трассы – от 10 до 20 м. Условия состязаний: 1. Первый этап – квалификация. Робот должен преодолеть трассу от старта до финиша за время, не превышающее 2 минут.
2. За касание стенки роботу дается штрафное очко. Если робот продолжает движение в соприкосновении со стенкой, то за каждый метр такого движения он получает дополнительное штрафное очко. Робот, получивший 3 штрафных очка, снимается с трассы.
3. До второго этапа допускаются только роботы, которые смогли пройти первый этап.
4. На втором этапе роботы стартуют парами, причем расположение робота (слева или справа) определяется заранее жеребьевкой.
5. Побеждает робот, который добрался до финиша первым. Если по прошествии 2 минут ни один робот не добрался до финиша, побеждает робот, расположенный ближе к финишу.
6. В зависимости от общего количества участников состязания проводятся по олимпийской системе или каждый соревнуется с каждым. И так, когда мы разобрались с правилами, перейдем к следующему этапу- "построение"
6396646.jpg
(13.9 Kb)
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
надо скрестить может "робота на л293д и стандартной логике к155лн1" + "лабиринт" )) Получится: едет робот, на нем два датчика по бокам, если один вдруг начинает регистрировать препятствие, не сбавляя скорости отварачивает от него, тоже самое с другой стороной, а если не успел, врезался, замкнулся датчик и робот отъехал назад, и дальше в перед. Как на такое смотришь ? 
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
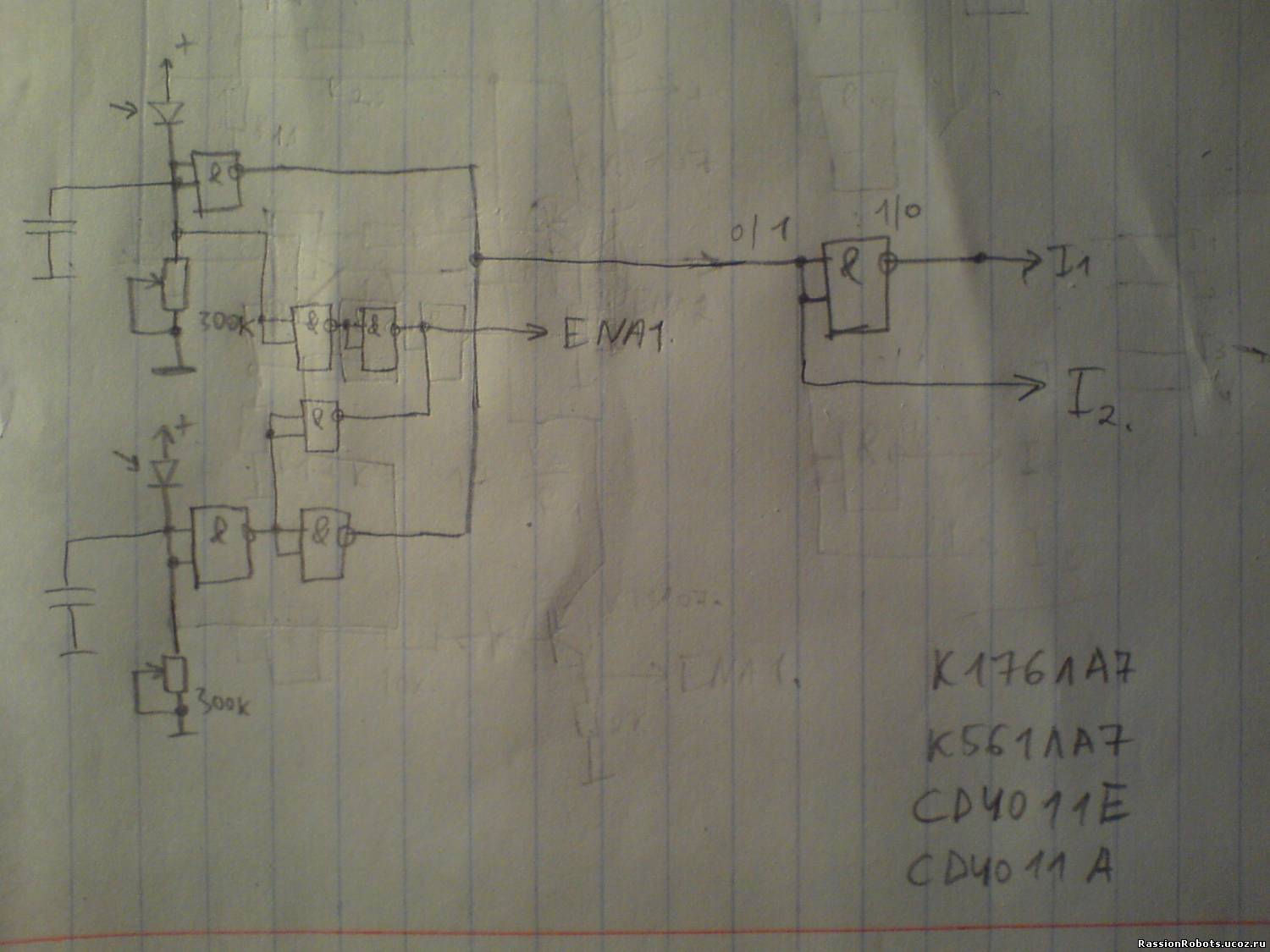
Можно и так. Точно, можно на логике, когда правый датчик находит препятствие, включаем рулевой двигатель в обратную сторону и наоборот. Только логику желательно использовать серии 176 или 561 (есть импортные аналоги) т.к. деталей будет меньше в схеме и батареек меньше жрать будет. Схема:
I1,I2 - Input1, Input2
ENA1 - Enable1.
Как работает схема понятно?
0888483.jpg
(106.0 Kb)
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Не совсем, опиши.
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Правая часть схемы для управления ДД. Если на входе 1 то крутится в одну сторону, иначе в другую.
Если на верхнем датчике 1, то сигнал инвертируется и идет на правую часть схемы, двигатель крутится в одну сторону.
При этом на ноге Enable логич. 1.
Если на нижнем датчике 1, то на Enable 1, после 2-х И-НЕ элементов на правую часть схемы идет логич. 1, двигатель крутится в обратную сторону.
3 логических элемента слева в центре нужны для управления включения/выключения драйвера двигателей, вращать рулевой двигатель нужно не всегда, а только когда сработает датчик.
Можно использовать элементы НЕ, не обязательно И-НЕ.
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
И как это будет выглядеть, в действии, начиная с "Включаем питание и роб..." ?
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Едет вперед, как только начинает приближаться к стене одной из сторон, то включает рулевой двигатель, пока не встанет по центру (робот), и тп...
Ведущий двигатель включен постоянно, ну или его можно включать дистанционно при помощи ДУ, D триггера и оставшийся половине L293D.
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Ок, надо ПП сделать.
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Добавлено (16.05.2010, 17:18)
---------------------------------------------
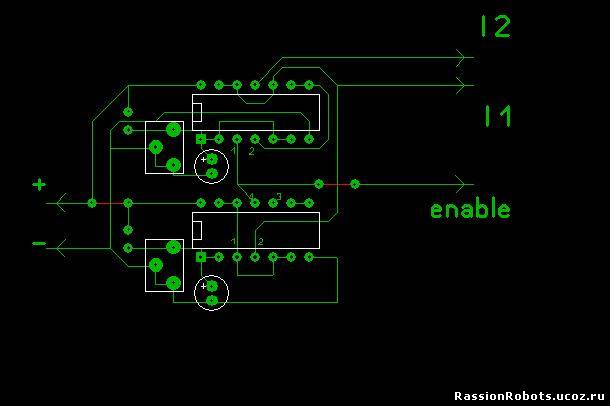
Делать тогда на CD4011E Добавлено (16.05.2010, 17:20)
---------------------------------------------

8386593.jpg
(117.8 Kb)
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Ага. Питание не меньше 5 вольт.
Плату ДУ сильно не потроши, подпиши где какие выходы, ок?
Пульт есть?
Если будешь делать включение пультом, понадобится D Триггер, CD4013E например.
Там случайно ли не серва стоит в руле?
Еще не помешает регулятор скорости (схему я давал в теме лабиринт, в конце.) только сначала отладь её навесным монтажем, перед разводкой ПП.
С этой схемой также, сначала навесным, потом ПП.
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Quote (nightmare) Плату ДУ сильно не потроши, подпиши где какие выходы, ок?
я хочу сделать включение по радиоканалу. Сигнал дал, робот включился и поехал, еще раз-выключился. Я не хочу ру убирать, пусть будет, это веть не противоречет "роботу", так как в ралли я им управлять не буду 
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Ну давай, микросхемы есть?
Вообще не обязательно на КМОП логике делать, можно и на ТТЛ, но тогда понадобится еще 2 компаратора для фотодатчиков или ИК бампер на тсопах (с двумя тсопами)
Ща пожалуй соберу эту схему, К176ЛА7 только одну нашел, зато нашел 2 К176ЛА9...
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
куплю, всетаки буду к561ла7 юзать, других не нашел.
Так, там, на сколько я помню, 4 элемента 2и-не, мы два и объединяем и делаем НЕ. Нам понадобится две к561ла7, та как надо 7 НЕ, правильно ?
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Да. можно на какой-нибудь ЛН сделать, короче можно на НЕ элементах.
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
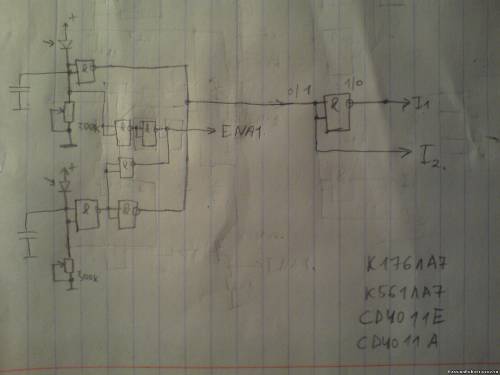
Ну вот что у меня получилось по твоей схеме: Проверь на правильность. Добавлено (16.05.2010, 18:54)
---------------------------------------------
микросхемы к561ла7 Добавлено (16.05.2010, 18:56)
---------------------------------------------
на всякий пожарный справочная документация по ла 7
7961953.jpg
(21.9 Kb)
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Куда ты летишь как паровоз!!
Я только что собрал её навесным монтажем и обнаружил некоторые подводные камни...
|
|
|
|
|
|