Подписывайся на наш Телеграм канал, задавай вопросы по роботам, делись своими схемами,
помогай другим собирать роботов и набирайся опыта!
t.me/servodroid
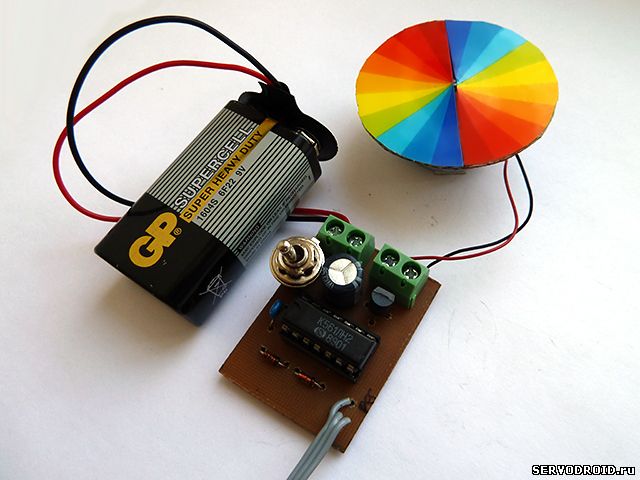
Импульсный регулятор позволяет плавно регулировать скорость вращения низковольтного электродвигателя от нескольких оборотов до максимальной частоты вращения. Регулятор (фото.1,фото.2) найдёт применение в малогабаритных устройствах, например в качестве регулятора скорости передвижения робота или в бытовых устройствах.
Электронный регулятор имеет широкий диапазон питающих напряжений от 3,6 до 12 вольт. Нагрузочная способность выходного транзистора позволяет подключать к регулятору два низковольтных мотора одновременно. Электронный регулятор можно использовать в схемах управления моторами робота.
Один регулятор может управлять скоростью двух моторов одновременно. Или установив два одинаковых регулятора изменять скорость вращения моторов индивидуально.
$CUT$
***
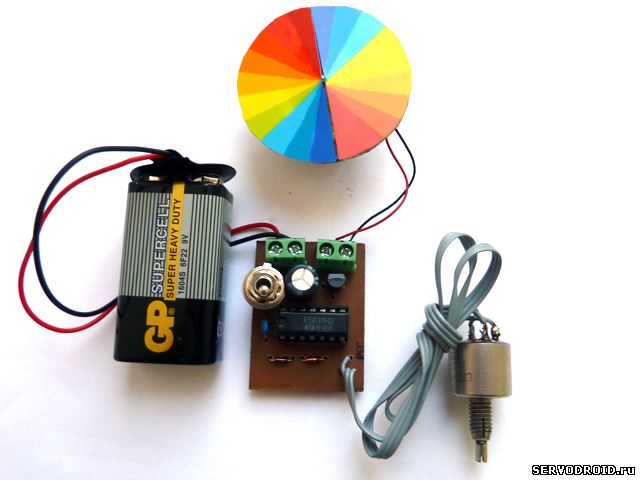
Фото.2. Нажать фото для увеличения.
1.ДЕМОНСТРАЦИОННАЯ ФЛЕШ-ПРОГРАММА.
Как пример была создана флеш-программа с интерактивными элементами управления. Управляйте скоростью вращения цветного диска с помощью ползункового переменного резистора. ИНСТРУКЦИЯ: включите перекидной тумблер, после появления диска захватите его мышкой и наденьте на ось мотора, управляйте скоростью вращения диска ползунковым регулятором.
Цифровой регулятор позволяет управлять не только моторами, но и низковольтными лампами накаливания или светодиодами! В случае подключения светодиодов их необходимо соединить последовательно в гирлянду как на видео.2. На видео вместо подстроечного резистора, для удобства регулирования, подключен резистор переменного сопротивления через тонкий монтажный провод.
2.ВИДЕОТЕСТЫ ЗАПУСК ШИМ-РЕГУЛЯТОРА.
На видео.1 продемонстрировано управление скоростью вращения вала мотора. На видео.2. продемонстрировано управление яркостью свечения гирлянды из последовательно соединённых светодиодов.
Видео.1
Видео.2
3.ФУНКЦИОНАЛЬНОЕ НАЗНАЧЕНИЕ ЭЛЕМЕНТОВ.
Основные элементы управления и клемники подключения показаны на фото.3. Регулировка скорости вращения вала мотора выполняют подстроечным резистором (1). Вместо подстроечного резистора можно подключить резистор переменного сопротивления на шлейфе (фото.2). К винтовому клеммнику (4) подключают мотор. К винтовому клеммнику (3) подключают источник питания. В качестве выключателя питания установлен тумблер (2).
Фото.3. Нажать фото для увеличения
4.ПРИНЦИП РАБОТЫ.
На логических элементах DD1.1 и DD1.2 микросхемы выполнен генератор с регулируемой скважностью импульсов. Скважностью импульсов называется отношение периода следования импульсов к их длительности и обозначается буквой S"" S=T/t. Регулировка осуществляется подстроечным резистором R1. Вращая ручку подстроечного резистора R1 можно изменять длительность выходного импульса, в значительных пределах увеличивая или уменьшая, таким образом, число оборотов двигателя M1. Перемещение ручки подстроечного резистора R1 влево по схеме, уменьшает ширину импульса на выходе генератора. А перемещение ручки подстроечного резистора R1 вправо увеличивает ширину выходного импульса.
Рис.1 Электрическая схема регулятора.
С выхода генератора импульсы поступают на инверторы DD1.3,DD1.4 которые усиливают и инвертируют сигнал, Элементы DD1.5,DD1.6 вновь инвертируют сигнал и преобразуют в последовательность положительных импульсов. Положительный управляющий потенциал поступает на вывод затвора полевого транзистора VT1. Когда на затвор транзистора VT1 поступают импульсы с малой длительности транзистор VT1 находится в открытом состоянии незначительное время. Поэтому вал двигателя M1 будет вращаться с небольшой скоростью. Когда на затвор транзистора поступает последовательность импульсов максимальной длительности, то транзистор будет открыт большую часть времени. Поэтому вал двигателя M1 будет вращаться с максимальной скоростью. С указанным по схеме транзистором штатная нагрузочная способность устройства может быть до 1,5А.
5.ДЕТАЛИ И МАТЕРИАЛЫ.
Печатная плата рис.2 изготовлена из одностороннего листа стеклотекстолита толщиной 1-2мм. Размеры печатной платы 40x30мм. Монтаж радиокомпонентов выполняется по приведённому чертежу рис.3. Список радиокомпонентов приведён в таблице 1. Если предполагается повышенная нагрузка по току потребления (более 1,5А), то транзистор необходимо установить на радиатор. Если предполагается подключение моторов с большим током потребления , замените транзистор на более мощный.
Табл.1 Список радиокомпонентов.
ПОЗИЦИЯ
НАИМЕНОВАНИЕ
ПРИМЕЧАНИЕ
КОЛ-ВО
DD1
К561ЛН2
1
VD1,VD2
1N4148
2
VT1
КП505А
1
R1
470кОм
подстроечный резистор
1
C1
750пф
1
C2
470мк16В
полярный конденсатор
1
SB1
тумблер перекидной
трёхвыводный
1
Допустимая замена радиокомпонентов. Импортные диоды 1N4148 можно заменить на отечественные типа КД521Б или КД522Б. Но необходимо учесть что чёрная полоска на корпусе отечественного диода (рядом с выводом) указывает на плюсовой вывод (анод). В то время как у импортных диодов всё наоборот, чёрная полоска указывает на минусовой вывод (катод). От конденсатора C2 зависит пусковой ток и стабильность работы генератора. Чем больше ёмкость конденсатора С2 ,тем лучше, но нужно учитывать что под конденсатор отведено на печатной плате, посадочное место с фиксированными размерами. Если отсутствует отечественный транзистор КП505А, его можно заменить импортным аналогом BSS295. Отечественную микросхему К561ЛН2 можно заменить на импортную CD4049. В качестве источника питания рекомендуется использовать батарею составленную из отдельных гальванических элементов или сетевой источник питания с выходным стабилизированным напряжением в диапазоне от 3,6В до 12В.
Рис.2.Печатная плата (bottom)
Рис.3.Монтажная плата.
Чертежи на рис.2 и рис.3 приведены в увеличенных размерах!Все чертежи в точных размерах приведены в архиве.
В архиве: чертеж в точных размерах теромоклише и монтажный (сборочный) чертёж. Преобразовывать и редактировать чертежи нельзя! После скачивания распечатайте чертежи на лазерном принтере. Термоклише на глянцевой бумаге, Используйте термоклише для перевода рисунка на стеклотекстолит по методу ЛУТ.