|
Простой робот двигающийся по линии на LM358
|
|
Участник
8 сообщений
Мужчина
|
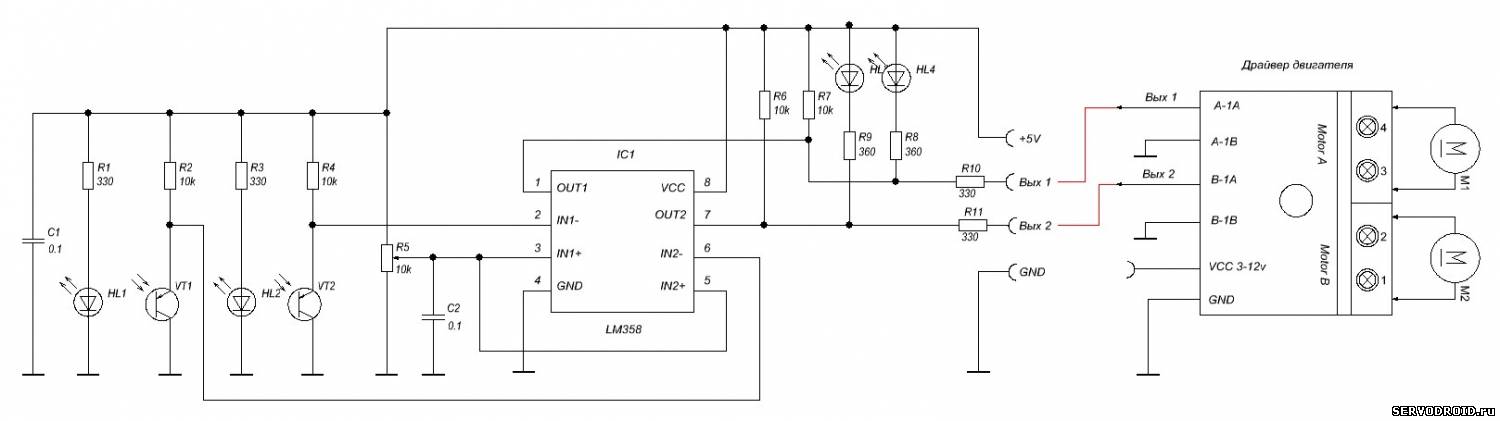
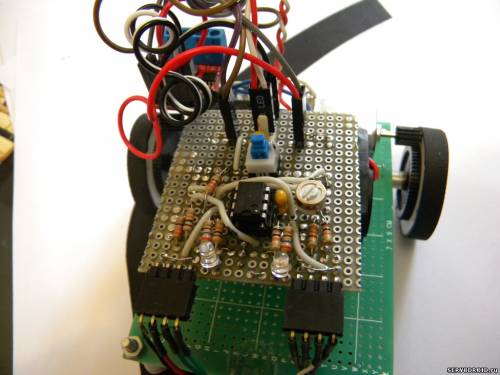
Простой робот двигающийся по линии на LM358. Робот сделан по схеме датчика линии на LM311. Микросхема LM311 была заменена на LM358 без изменений в схеме. Добавлена только еще одна пара датчиков и обвязка на еще один выход.
Добавлено (10.03.2014, 13:54)
---------------------------------------------
Видео здесь
http://youtu.be/SHiPwYp2cqQ
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
AndyWorld, алгоритм напоминает П-регулятор, или его разновидность(ПД), хотя... Вы используете 3 оптопары ?
|
|
|
|
|
|
Участник
8 сообщений
Мужчина
|
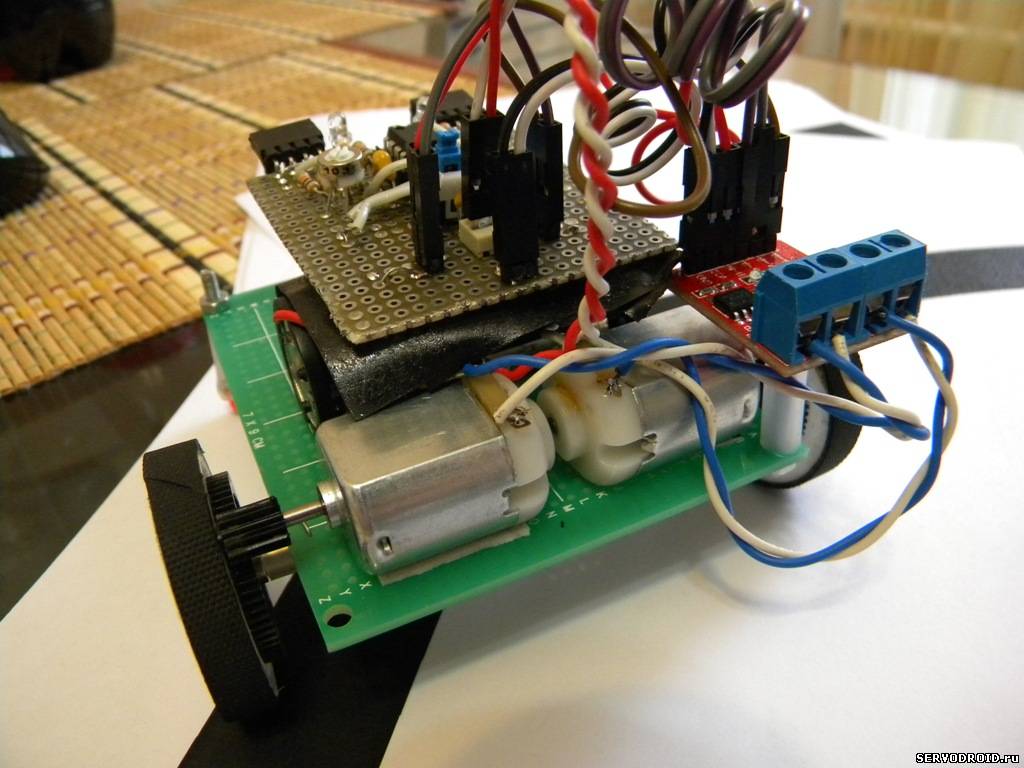
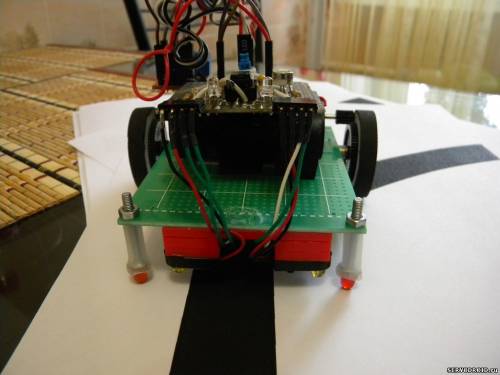
Нет, две. Моторчики от USB вентиляторов. Куплены в магазине "FixPrice все по 38 руб." Запчасти от Лего удобно подошли в качестве креплений датчиков. Можно регулировать как высоту так и ширину. Драйвер моторов Китайский. Ни как не мог инвертировать сигнал с ОУ. Мне нужно было чтобы пока датчик на белом поле двигатель крутились бы. Ставил биполярный обратной проводимости, но он не закрывался почему-то.
$IMAGE2$
$IMAGE3$
3634924.jpg
(208.4 Kb)
|
|
|
|
|
|
Участник
8 сообщений
Мужчина
|
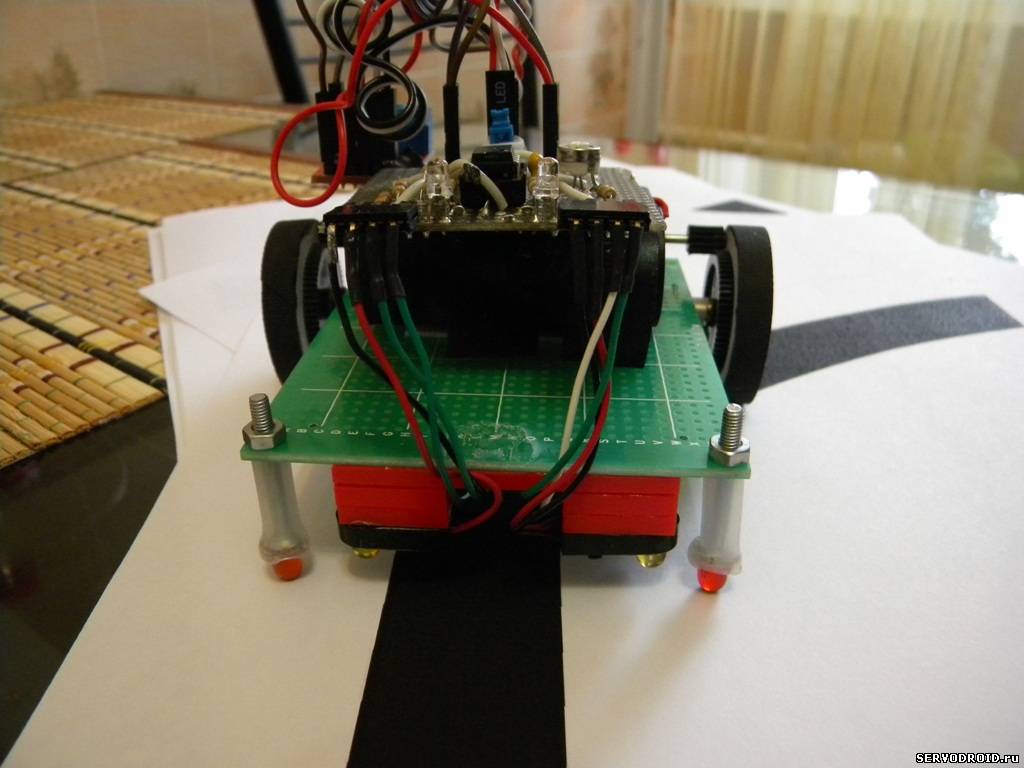
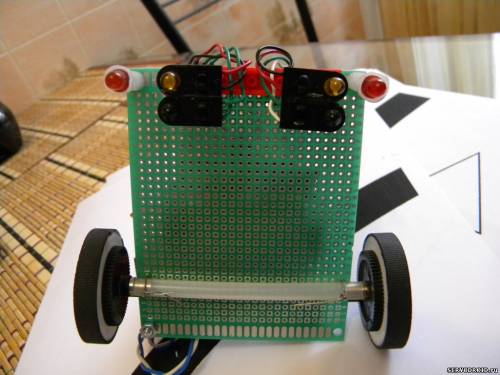
Опоры, это старые светики приклеенные к шляпке винта. Все это вставлено в виниловую трубочку.
6090843.jpg
(185.5 Kb)
|
|
|
|
|
|
Участник
8 сообщений
Мужчина
|
Колеса сделаны из заглушек стиральной машинки. Это даже не заглушка а колпачок. По середине вырезан выступ и наклеена шестерня. В качестве протектора наклеена полоска резинового ремня с мелким протектором. Это ремень с банкомата NCR. Они со временем растягиваются и старые просто выбрасывают. Заведите дружбу с АйТиШниками Сбербанка, и они вам отдадут просто этот мусор. Оптопары тоже от банкомата. Но не суть. Пойдут любые.
8621757.jpg
(206.0 Kb)
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Весьма аккуратно и продумано сделано ! А шестеренки и их крепление не люфтит ?
|
|
|
|
|
|
Участник
8 сообщений
Мужчина
|
Алгоритм работы простой. Пока датчик на белом поле, моторы крутятся. как только один датчик налетает на черную линию, один мотор останавливается второй корректирует положение робота в противоположную сторону. Датчик снова выходит на белое поле и двигатель включается.Естественно если оба датчика будут на черной линии - то оба мотора остановятся.
Добавлено (10.03.2014, 17:01)
---------------------------------------------
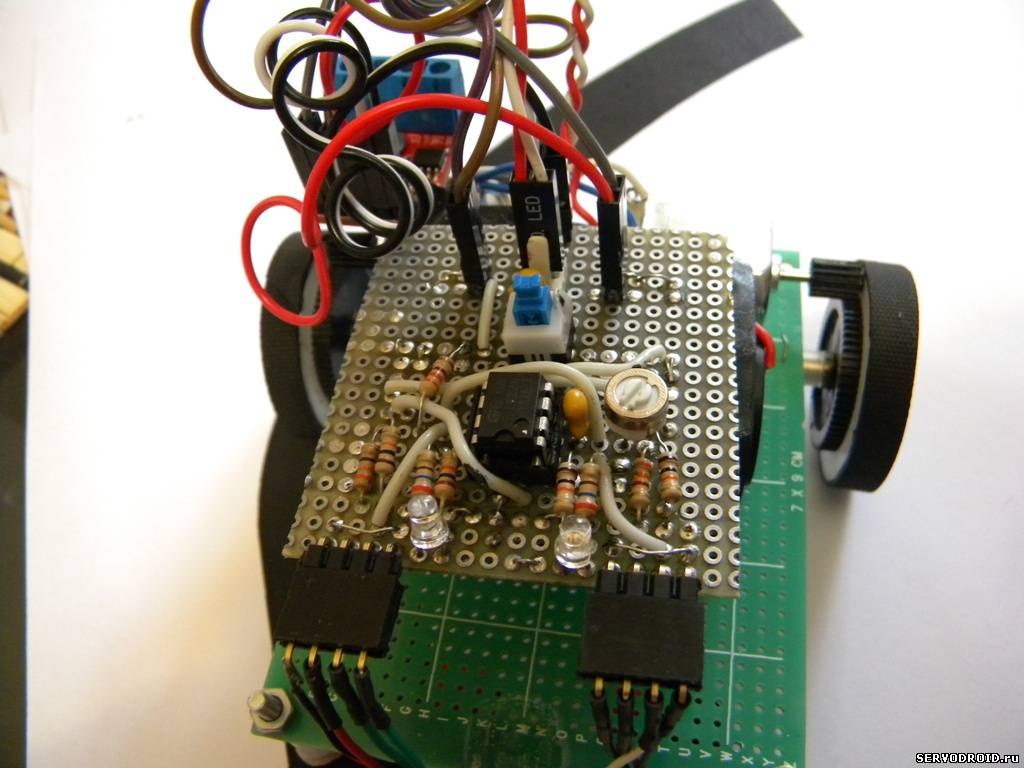
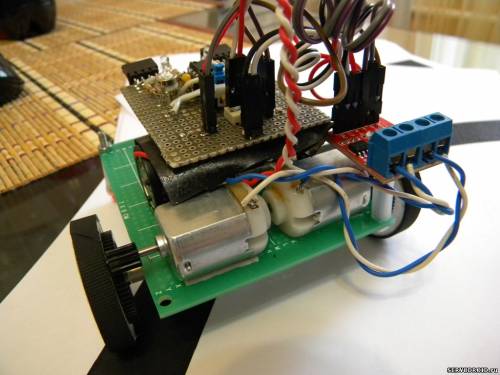
Люфт есть. Особенно на том двигателе где стоит драйвер. Шестерни разные, думаю что на этой шестеренке зубов больше. Шумит сильно. Я их вынул с какого-то механизма. Сейчас я нашел еще точно такой же. Поэтому, думаю поменять ее. Скачал трассу из конкурса сайта. Хочу попробовать засечь время.
2645503.jpg
(228.5 Kb)
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
У вас сейчас стоит редуктор больше на тягу рассчитанный чем на скорость. Т.е. свой вес он потянет, даже еще больше, но скорость как была такой - такой и останется (~). Если поставить моторы под углом, чтобы робот опирался не на колеса а на оси моторов, на которые надеты кембрики - то он будет гораздо быстрее ехать, плюс свой ве утянет без нагрузки свободно.
|
|
|
|
|
|
Участник
8 сообщений
Мужчина
|
Хммм. На "Олимпийской" трассе начались проблемы. На крутых виражах робот сходит с трассы. Регулировка опорного напряжения не сильно меняет положение дел.
Видео здесь:
http://youtu.be/c5c1Oj0pcgg
Не пойму как вставить код просмотра видео с Ютюба.
|
|
|
|
|
|
Участник
8 сообщений
Мужчина
|
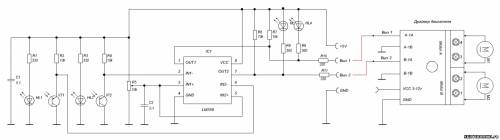
Схема для повторения.
9173558.jpg
(50.0 Kb)
|
|
|
|
|
|