Подписывайся на наш Телеграм канал, задавай вопросы по роботам, делись своими схемами,
помогай другим собирать роботов и набирайся опыта!
t.me/servodroid
В современном быстроразвивающемся мире технологий робототехнике отводится много разнообразных задач. Одна из которых, взаимодействие с окружающей средой и/или себе подобными. При решении этой задачи отдельные объекты образуют группы в результате множества сложных взаимодействий, факторов. Эти группы способны выполнять поставленные задачи гораздо эффективнее чем отдельные объекты. На основе временно самоорганизующихся систем была спроектирована модель социального поведения на примере простых роботов с технологией BEAM. При проведении экспериментальных исследований ставилась задача имитации поведения в искусственной среде. На объекты помещённые в экспериментальную среду предположительно воздействуют разнообразные факторы. Изучение факторов влияния и вариаций поведения роботов в группе привели к появлению представленного проекта. Проект получил название "CORKbot” –роботы из пробок.
Методы, использованные автором:
Исследования проводилось в технической лаборатории Физико-математического лицея №239. Взяв за основу технологию создания BEAM роботов, совместно с разработчиками с сайта servodroid.ru, была спроектирована электрическая схема робота. При разработке электрической схемы ставилась задача использования минимального числа радиокомпонентов и наличие входного и выходного интерфейсов. Под интерфейсами подразумеваются элементы взаимодействия с окружающей средой. Чтобы не усложнять конструкции, в схему был введён один датчик света (фототранзистор) и один светодиод. Задача фототранзистора восприятие внешней информации, задача светодиода передача собственной информации в окружающее пространство. Поведение отдельного робота является сложносоставным процессом включающее множество случайных и закономерных факторов. Например, уровень освещённости в помещении, воздействие светодиодных излучений от аналогичных объектов, уровень напряжения источника питания, форма и фактура поверхности для передвижения, наличие препятствий в виде аналогичных или иных объектов. Передвигается робот с помощью вибромотора. При его работе на корпус передаются вибрации, приводящие к нелинейному передвижению робота.
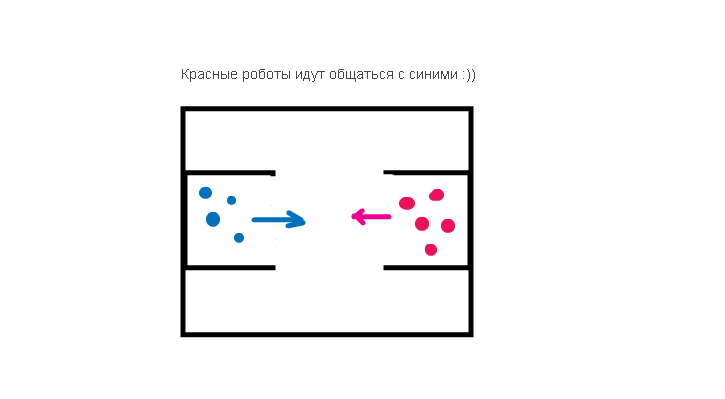
Разберём один из видов реакций данных роботов-это реакция на свет. Попадание света на окно фототранзистора вызывает эффект синхронизации и робот начинает поворачивать в одну сторону. Таким образом два одинаковых объекта могут передвигаться синхронно в одном направлении. Если на окно фототранзистора свет не попадает, то робот поворачивает в противоположную сторону. Что приводит к десинхронизации, взаимодействия между отдельными объектами не получается и робот меняет вектор направления передвигаясь в другую часть пространства. Если роботы расположены рядом в группах происходит их взаимное влияние приводящие к временной организации группы. Дополнительным фактором способствующем эффекту группового поведения является изменение цвета свечения светодиода. При изменении цвета свечения светодиода отдельного робота изменяется уровень воздействия на фототранзисторы соседних. Это обусловлено разной степенью чувствительности фототранзистора для разных длин волн спектра и, собственно, различной реакцией (уровень усиленного фототока будет изменяться). Описанные изменения приведут к одномоментным изменениям частоты вращения вала мотора и скорости передвижения робота, то есть отразиться на его "поведении".
Основные результаты:
Использованные подходы конструирования и схемотехническое решение позволяют создать относительно сложную, в групповом аспекте взаимодействия, модель поведения для робототехнических устройств. Проведённые эксперименты показали вектор направления развития BEAM роботов или элементов данных технологий. Таким вектором (направлением) является коллективное взаимодействие в группах.
Заключение и возможные пути развития задачи:
В настоящее время, и в будущем, системы социального поведения, будут развиваться ускоряющимся темпом как наиболее эффективные. Это приведёт к созданию, допустим робота-помощника, который будет обслуживать, больницы и иметь связь другими роботами для передачи срочной информации. Или ремонтных роботов быстро устраняющих течь в трубе или роя из роботов изучающих космическое пространство или роботов спасателей. Результат такой работы - ни одного сбоя, быстро и эффективно выполненная работа.
Защита проекта:
1. Санкт-Петербург, Дом Детского технического творчества. II место
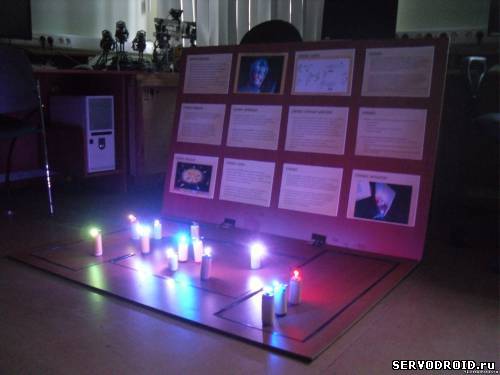
28 января 2011 в СПбЦД(Ю)ТТ прошел XIII городской конкурс проектов конструирования и моделирования "От идеи до воплощения". Данный конкурс проводился с целью выявления способности школьников к решению изобретательских задач, овладению ими техническими знаниями и интереса к углубленному изучению технических и естественных наук, выявления одарённых и талантливых детей в техническом и прикладном творчестве, обмена опытом среди учащихся, ознакомления общественности с творческими достижениями юных конструкторов и моделистов, а также активизации научно-технического творчества в образовательных учреждениях. Конкурс является отборочным этапом Всероссийской выставки научно-технического творчества молодежи. В конкурсе приняли участие более 100 учащихся из 25 образовательных учреждений 12 районов Санкт-Петербурга, из них 16 учреждений дополнительного образования детей и 9 школ.
2. Санкт-Петербург,
[/offtop]
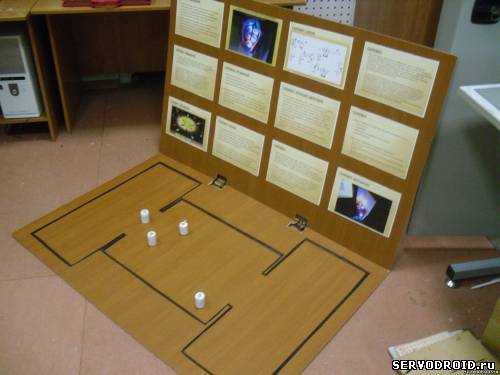
Проект: "BEAM Социум" или "CORKBOT" Описание проекта: создание некого подобия группового поведения, при котором каждый объект влияет на другой с разной силой в разный(рандомный) промежуток времени. Как работает: если есть всего один робот, то он ведет себя однотипно, двигаясь по спераливидной траектории, и реагирует на внешние фаторы, например такие как источник света. Если роботов два и более,начинает проявляться групповое поведение, которое регулируется каждым из объектов этой группы. Т.е. помимо того, что каждый робот из группы взаимодействует с окружающей средой, каждый еще и реагирует на себе подобного. Реакция проявляется в нескольких видах, основными из которых являются: фиксация и движение вместе с другим(группа разбивается на подгруппы по 2-3 робота); избегание(социопад) себе подобных.
Пока в нашем ассортименте имеется 5 таких роботов. Предположительно будет сделано их в количестве 15-20 шт ! Чем их больше тем интереснее наблюдать за их поведением.
Этот проект будет готовиться к политеху в январе 8-9 числа.
И вот что меня интересует: Где, как вы думаете, можно недорого купить вибромоторы в количестве 15х2 шт ?
Еще предложили сделать ведомых и ведущих. Из схемы дихотомического...вот думаю как это реализовать на вибро ? )
Они когда поворачиваются только вокруг центра донышка крутятся, да? Вот так бы их заставить крутиться и будут друг за другом носиться, даже схему дихотома можно не менять) http://www.youtube.com/watch?v....e#t=48s (ссылка с привязкой ко времени, встраивать его не нужно)
Ну как бы да, крутятся вокруг себя. С ножками не охота возится ) Да и чтоб прямо ехал по схеме на видео должны крутится оба мотора вместе. Дихотом же только 1 или второй
Где же мне пробок 30 шт надыбать... ?
Добавлено (23.12.2011, 18:53) --------------------------------------------- По пробкам отправил запрос, может выручат.
на нижнюю платформу можно попробовать приклеить часть от липучки на которой крючки. может это улучшит передвижение. а с передвижением я предлагаю так- когда свет не попадает на фт то робот вклюает поочередно моторы и будет что то вроде такой траектории а когда попадает свет то он включает два мотора и едет прямо.
что это за аккумуляторы? как ты их в пробку запихивать будешь??? оО
-да, других тупо не собралось такое кол-во. Я в магазин приехал "микроника" а там эти черти перестройку затеяли, нихрена на прилавках не лежит, я ведь модель не знал, я так, чисто визуально. Пришлось икать по базе ихней.
Впихну как-нибудь.
Кстати, как их заряжать ? Можно ли заряжать зарядкой от мобилы ?
S-T-A-L-K-E-R(А), его нельзя заряжать,так как это литий,тоесть он не выдержит температуру,да и еще уважаемый С-Т-А-Л-К-Е-Р когда начнуться соревнования???(соревнования Offklne-соревнования)























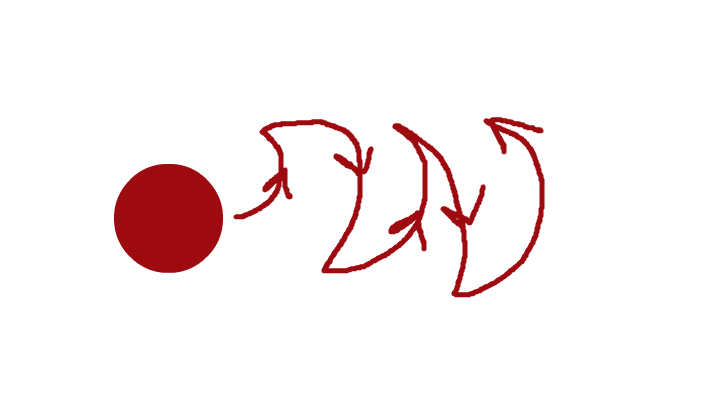 а когда попадает свет то он включает два мотора и едет прямо.
а когда попадает свет то он включает два мотора и едет прямо.