Подписывайся на наш Телеграм канал, задавай вопросы по роботам, делись своими схемами,
помогай другим собирать роботов и набирайся опыта!
t.me/servodroid
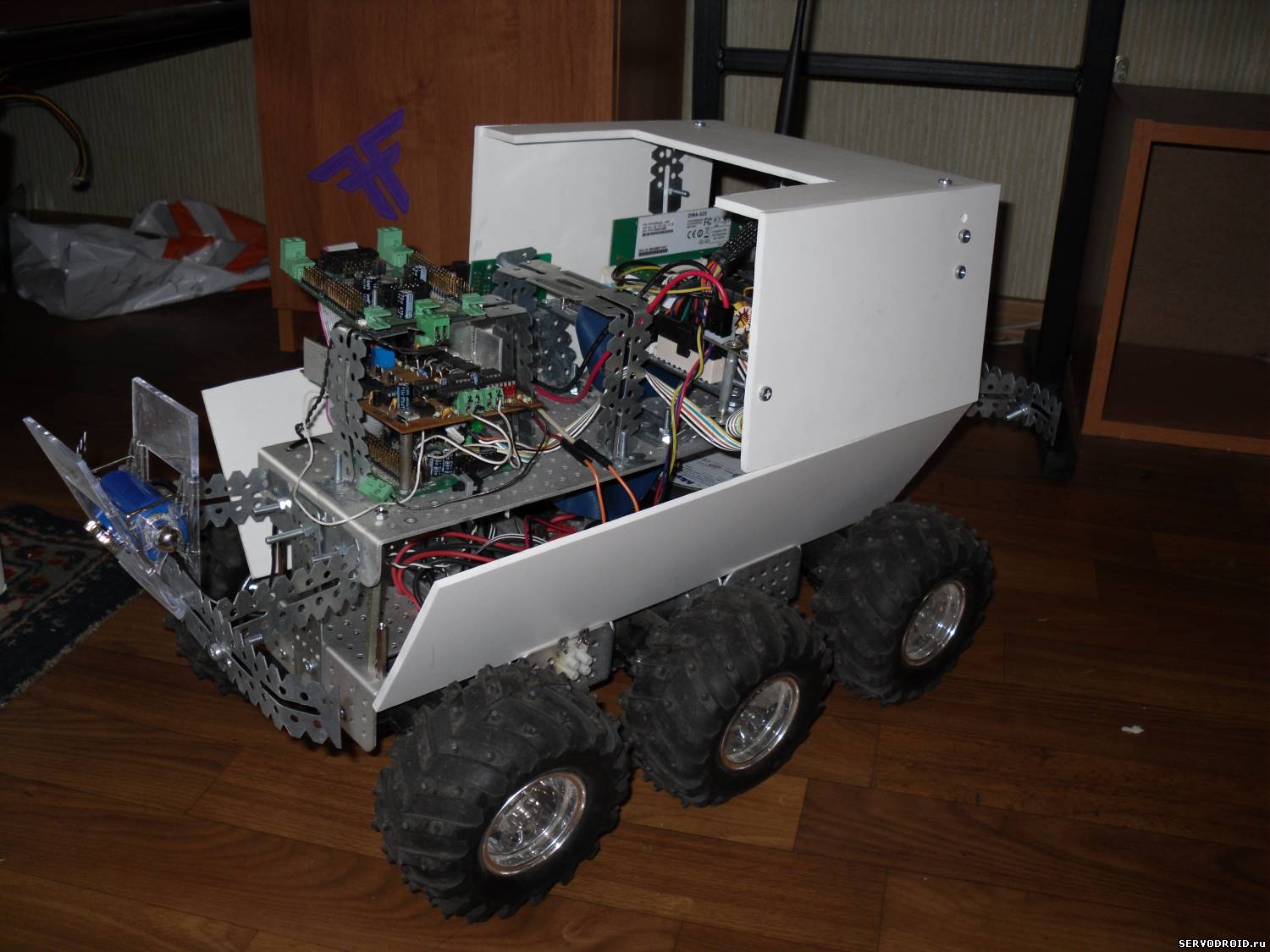
Я уже честно говоря сбился со счету, сколько там всяких "версий" в итоге получается...В одной одно добавлено, в другой другое... Ну а версия эта будет уже с функциональным исполнительным коммандным устройством, на базе процессора Intel Atom.
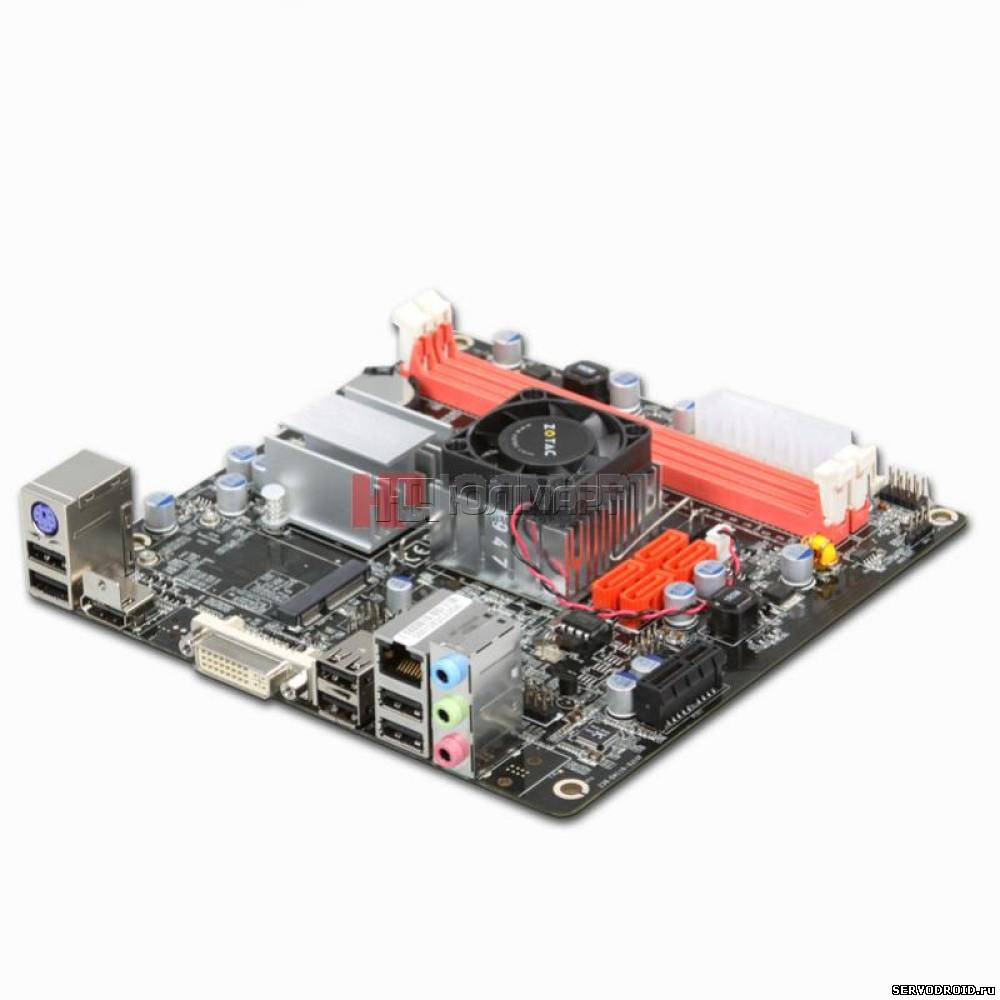
Вот собственно его мать:
Характеристики следующие:
Quote
Производитель процессора Intel Тип встроенного процессора Atom Производитель чипсета nVidia Чипсет NVidia® ION™ Тип памяти DDR2 Форм-фактор mini-ITX Частота шины 533 Сеть Gigabit LAN SATA RAID 0 1 0+1 Порты и разъемы 4x USB Задняя панель 6 x USB PS/2 HDMI HD Audio port Память DDR2 667/800 PCI Express x1 x1 SerialATA x4 Аудио 5.1-канальный кодек
Блин )) Судя по тому, что робот начал ехать и назад и в перед и в лево и в право можно сделать предположение...что ДД заработал только с отдельным питанием пущенным на МК и непосредственно на шасси
Есть вариант запустить робота по линии используя ШИМ... но, я очень рискую перегреть тем самым мосфеты и их спалить.
Клвёво, только с передачей видео какой-то косяк. Создается впечатление, что оператор сидит даааалекоооо от робота. ОСЕ бы еще металлический панцирь и гидроизоляцию, получится диггероход Кстати, в свежем выпуске Галилео про то как делают плазменные телевизоры показали одного забавного робота, как выпуск в инете будет посмотри
Кстати, в свежем выпуске Галилео про то как делают плазменные телевизоры показали одного забавного робота, как выпуск в инете будет посмотри
- и чем он так примечателен ? )
Quote (Aleks_Crow)
Тогда ей еще и кабель нужен, радиосигнал далеко не везде проходит
- кабель идея плохая с точки зрения проходимости... Он может зацепиться и робота потом хрен достанешь ) Есть же какие-нибудь усиленные беспроводные средства что могут метров на 50 пробить ? Я не в курсе просто...
[p.s.]У меня сейчас перебои с инетом, такчто пишите развернутей ))[/p.s.]
Вообщем не работает та прошивка через ком порт, уже запарился. Потер часть кода, оставил только переменные. Поигрался с ними, работает. ПОвключал моторы через ком порт, работает. Теперь проблема с pin'ами. НЕ могу понять, почему на плате подписанные пины не ставятся в 1. Хотя PinD9 поставился. Но при проверки пина не работает. Чудеса...
//-------------------------------------------------------------- define global variables --------------------------------------------
unsigned int Volts; unsigned int LeftAmps; unsigned int RightAmps; unsigned long chargeTimer; unsigned long leftoverload; unsigned long rightoverload; int highVolts; int startVolts; int Leftspeed=0; int Rightspeed=0; int Speed; int Steer; byte Charged=1; // 0=Flat battery 1=Charged battery int Leftmode=1; // 0=reverse, 1=brake, 2=forward int Rightmode=1; // 0=reverse, 1=brake, 2=forward byte Leftmodechange=0; // Left input must be 1500 before brake or reverse can occur byte Rightmodechange=0; // Right input must be 1500 before brake or reverse can occur int LeftPWM; // PWM value for left motor speed / brake int RightPWM; // PWM value for right motor speed / brake int data; int servo[7];
//int incomingByte = 0; // for incoming serial data //int Motor = A0; int Motor = 9;
void setup() { pinMode(Motor, INPUT);
pinMode (Charger,OUTPUT); // change Charger pin to output digitalWrite (Charger,1); // disable current regulator to charge battery
if (Cmode==1) { Serial.begin(Brate); // enable serial communications if Cmode=1 Serial.flush(); // flush buffer } //Serial.begin(57600); }
void loop() { //digitalWrite(Motor, HIGH); if (Motor == HIGH) {analogWrite(LmotorA,255); analogWrite(LmotorB,0);} if (Motor == LOW) {analogWrite(LmotorA,0); analogWrite(LmotorB,0);}
// send data only when you receive data: if (Serial.available() > 0) { // read the incoming byte: int incomingByte = Serial.read();
// say what you got: Serial.print("I received: "); Serial.println(incomingByte);
if (incomingByte == '1') { analogWrite(LmotorA,255); analogWrite(LmotorB,0); }
if (incomingByte == '0') { analogWrite(LmotorA,0); analogWrite(LmotorB,0); }
// left motor forward /* analogWrite(LmotorA,0); analogWrite(LmotorB,LeftPWM);
// left motor brake analogWrite(LmotorA,LeftPWM); analogWrite(LmotorB,LeftPWM);
// left motor reverse analogWrite(LmotorA,LeftPWM); analogWrite(LmotorB,0); */ } }












 [/p.s.]
[/p.s.]