Администраторы
3417 сообщений
Мужчина
|
Идея автоматизировать процесс перемещения в пространстве технического объекта появилась в результате изучения основ радиоэлектроники. Для этого, была создана испытательная платформа - ходовая часть с электроприводами, состоящая из редукторов, электродвигателей и колёс от детских игрушечных машинок перевертышей. Выбрая в качестве мозга для своего робота аналоговые схемы я руководствовался тем что они
- проще в изготовлении
- не прихотливы
- не требуют программирования после сборки
А также если цифровой робот может решить ту или иную задачу, исходя из загруженных в его программу кодов, то простой аналоговый BEAM – роботы приспосабливаются к окружающей среде а следовательно они более жизниспособны.
Принцип работы робота.
Принцип поведения робота основывается на отражении света, по этому принципу работает целый класс роботов получивший названия BEAM. Основным источником информации для этих роботов является свет.
Светодиод посылает световой сигнал, который в случае нахождения впереди препятствия отражается, возвращается и попадает на фотоэлемент, установленный на роботе. С помощью такого простейшего радара робот и получает информацию об окружающей его среде.
К недостатком такого рода зрения можно отнести что оно не позволяет роботу «видеть» предметы черного цвета.
Изначально я отработал найденную мной схему отдельно от ходовой части для проверки её на работоспособность. Таким образом, возник целый стенд для разработки различных схем автоматического управления и отработки компоновочных и конструкторских решений.
Первые положительные результаты дали возможность продолжить работу по расширению функций робота.
В конечном итоге робот должен был быть способен:
- следить за выбранным объектом,
- следовать по заданной траектории,
- иметь ручное ( радио ) управление,
- передавать данные на телевизор.
Ну а теперь всё по порядку.
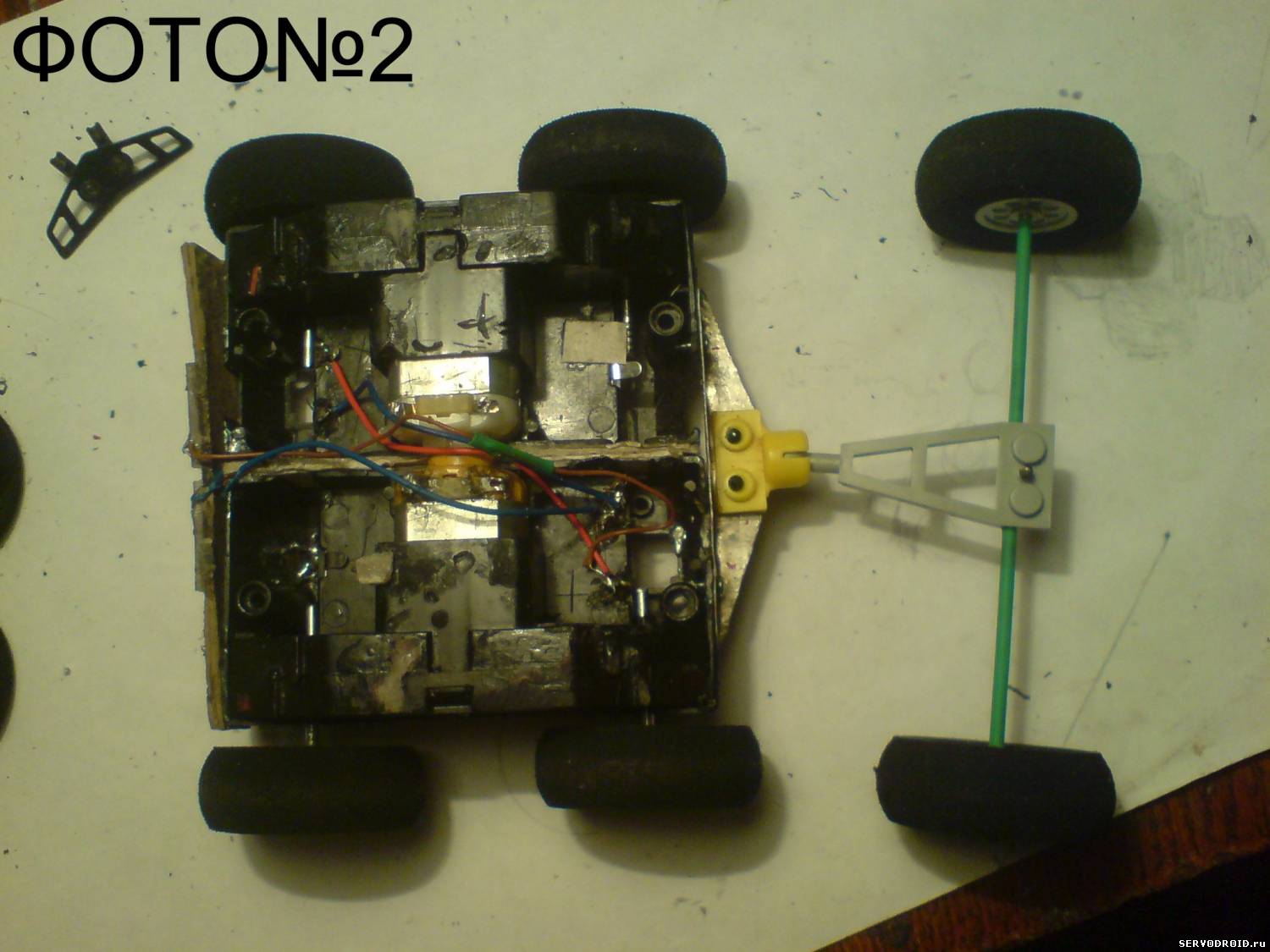
Первое что мне было нужно это ходовая часть. На её изготовление мне потребовалось 120 рублей и 1 час свободного времени.
Изготовить такую ходовую способен каждый. Для этого понадобиться две машинки перевёрташа. Я брал такие как на картинке качеством удивлён и доволен на 200%.

Теперь их надо проверить на работоспособность. После чего аккуратно снять корпус. А дальше в интернете найти статью где весь процесс подробно описан.
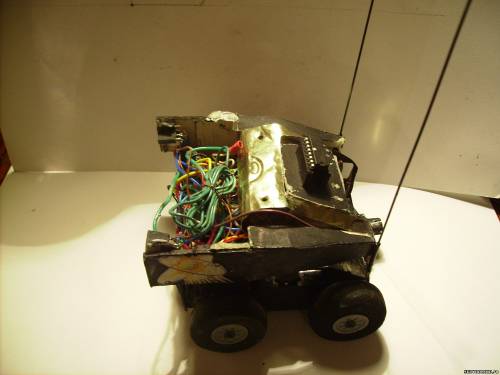
Мои перевертыши отличаются от тех что описаны в статье но принцип тотже. и вот что получилось

Также я установил колёса которые используются для радио управляемых моделей самолётов. Они смотрятся лучше но по сцеплению с дорогой сильно уступают «родным» колесам
(от перевертышей). Прицеп сделан для размещения на нём блока радио управления. И о нём как о возможности расширения робота я расскажу позже.
С ходовой разобрались теперь надо паять «мозг» и «глаза» дляэтого нам понадобятся:
1.Микросхема L293D - 1 шт
2.Панелька под эту микросхему (на 16 ножек) – 1шт
3.Фототранзисторы любые – 4шт
4.Светодиоды на 3вольта яркие
(лучше всего красные или желтые можно ик)
я брал диаметром 5 мм – 4шт
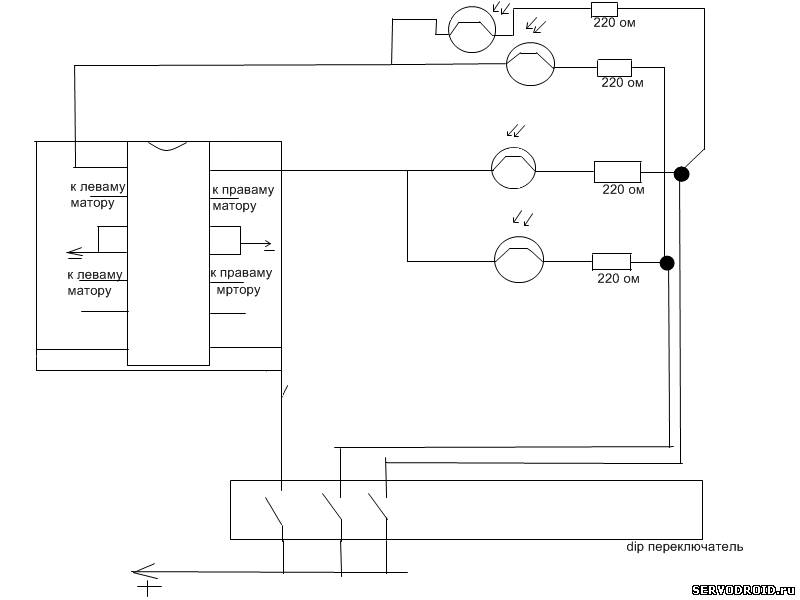
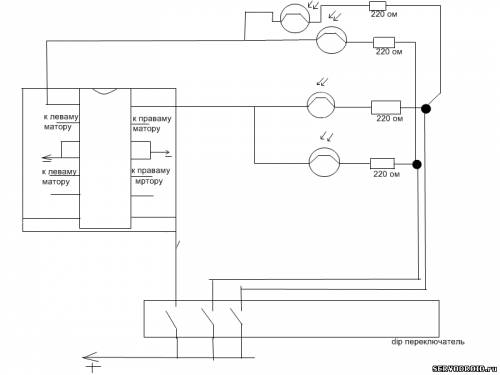
5. DIP-переключатель с семью контактными группами
(можно использовать 3шт с тремя группами контактов) – 1 шт
6.Резисторы на 220ом – 8шт
Цена всего вышеперечисленного от 180р до 300р в зависимости от места покупки.
1 и 3 – датчики, благодаря которым робот будет следить за рукой . они должны смотреть вперёд и располагаться так:
1 – с правой стороны
А 2 – с левой стороны.
С помощю датчиков 2 и 4 робот будет отслеживать линию.
При замыкании ключа a
Питание будет поступать на микросхему
А ключами b и c можно выбирать режимы работы
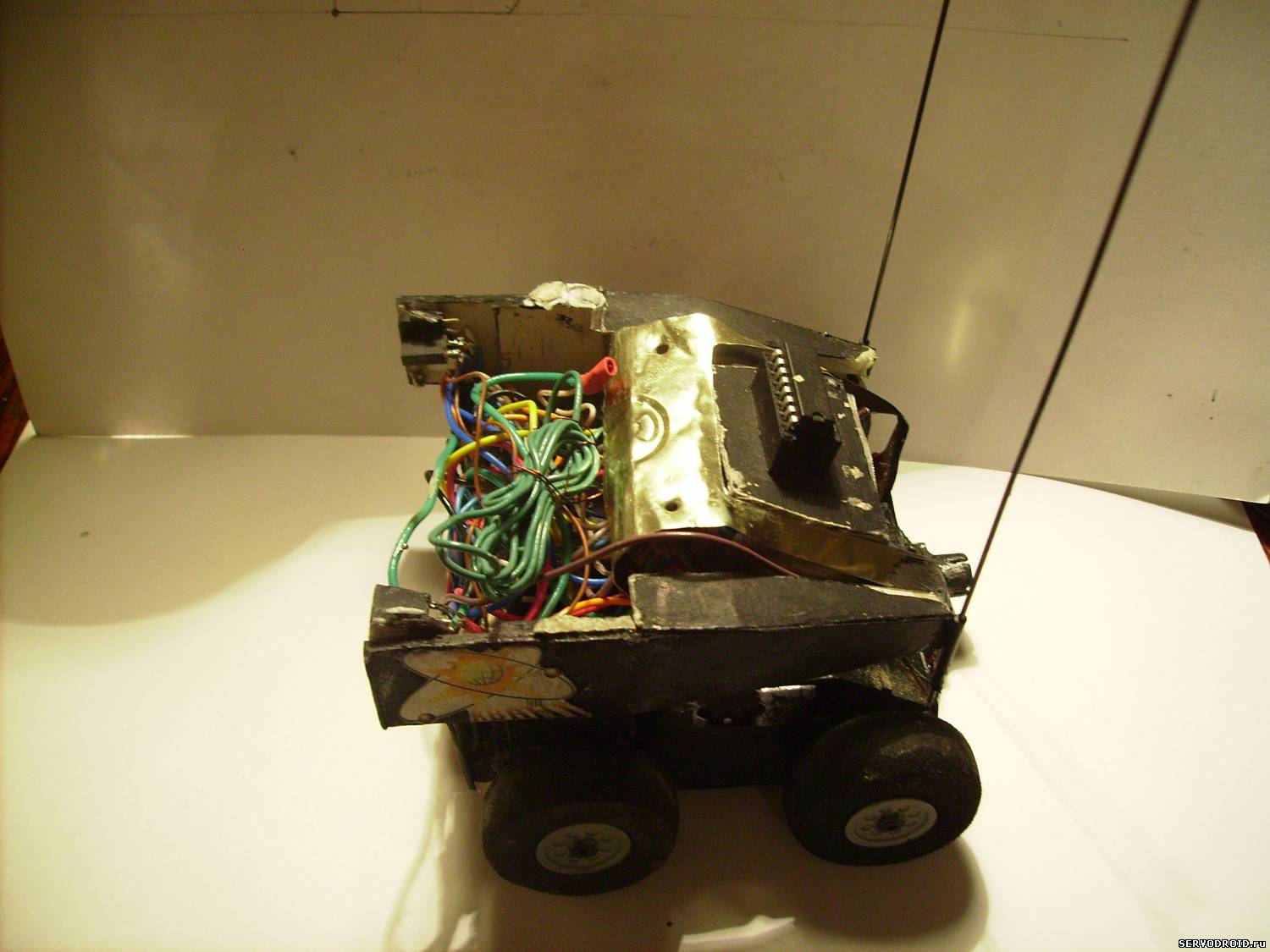
Собранный мной робот получил имя Квант. В процессе испытаний он показал хорошие технические характеристики:
• малые размеры и вес,
• низкий центр тяжести,
• высокую скорость перемещения,
• приличную проходимость
(с учётом размера самого робота),
• хорошую чувствительность датчиков.

Награды
Участник финала областного конкурса художественно-технического творчества «тула веками оружие ковала»
Победитель областного конкурса художественно-технического творчества «тула веками оружие ковала» в номинации «научно технический проект»
февраль 2012
Первое место на городской выставке «наследники левши – 2012» посвящённой 300 летию тульского оружейного производства в наминации радио электроника.
03.05 2012
Третье место на областной выставке творческих работ учащихся «наследники тульских мастеров» в номинации « радио и электронная техника»
26.04.2012
Третье место на выставке, проводимой в рамках 21 Всероссийской научно-технической конференции студентов, аспирантов и молодых учёных «Техника двадцать первого века глазами молодых учёных и специалистов»
апрель 2012
Победитель школьного этапа олимпиады школьников по технологии
10.10.2011.
Призёр муниципального Всероссийской олимпиады школьников по технологии
29.11.2011
Победитель в региональном этапе Всероссийской олимпиады школьников по технологии
03.02.2012.

Автор: Абальян Иван Константинович, ученик 10 класса А МБОУ – Г № 2
0706408.jpg
(390.0 Kb)
·
1063913.jpg
(116.2 Kb)
·
8736283.jpg
(120.7 Kb)
·
5598607.jpg
(116.1 Kb)
·
5475293.jpg
(140.6 Kb)
·
3336445.jpg
(68.0 Kb)
|
|
|
|
|
|
Начальная группа
1 сообщений
Мужчина
|
Молодец Иван! Так держать!
Ждем новых интересных работ.
|
|
|
|
|
|