|
OSA Rescuer [6-WD платформа-тягач ]
|
|
Администраторы
3417 сообщений
Мужчина
|
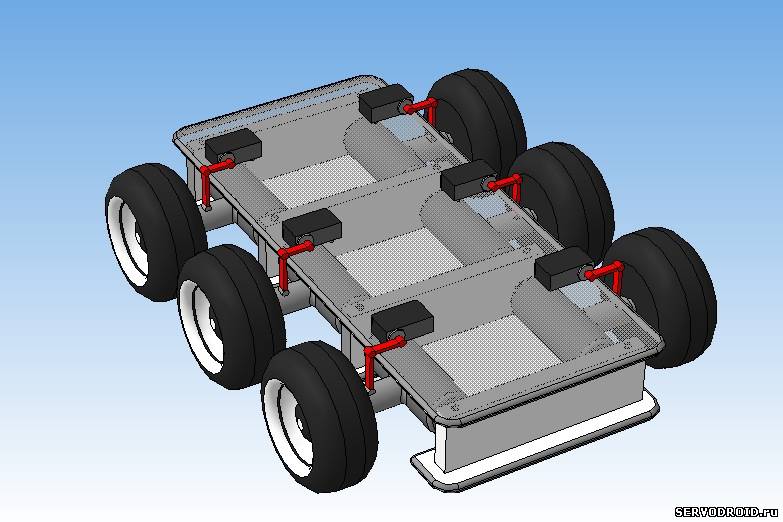
Данная тема является веткой главной темы по разработке спасательного комплекса под названием OSA RESCUER, в состав которой входят различные как программные, так и, как в этом случае, аппаратные средства. Данным средством является шестиприводная платформа-тягач, с установленной на борту видеокамерой.
Суть этой ветки в том, чтобы найти пути решения нескольких вопросов:
1. Нужно спроектировать крепкий, настильный корпус для робота.
2. Настроить работу GPS-модуля и передачу координат на стационарный пункт оператора.
3. Написать ПО, позволяющее задать маршрут следования платформы по заданным GPS-точкам.
4. ...
3227278.jpg
(140.0 Kb)
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Проблема следующая - я не разу не проектировал корпуса в 3D-виде, и как могу сказать наперед, легко ошибусь в размере и при конечном результате это выльется в корявый корпус и зря потраченные деньги. Не хотелось бы конечно.
С 3Д программами я знаком, делал 3Д в КОМПАСС, вот пример:
Но ведь это не сложно, и никаких затрат - все делается на ПК и там же остается, не было в то время нужды на яву воплотить эту 3Д модель. А теперь есть нужда )
---------------------
И так, каким делать корпус ? У меня есть идея сделать корпус в виде "кристаллической решетки", и каждую грань этой решетки нашпиговать отверстиями под болт, чтобы иметь возможность крепить на корпус разную электронику и периферию. Сам вид корпуса наверно будет интересным, плюс будет минимальный вес при максимальной сопротивляемости к ударам и нагрузкам - вес будет распределяться по сотам...
Ваше мнение ?
7459817.jpg
(103.4 Kb)
|
|
|
|
|
|
Участник
4 сообщений
Мужчина
|
Могу высказать свое мнение по изобретению, реализации своего проекта. Опыт конечно очень маленький, тем более его нет в 3D моделировании. Придумать и создать проект "на бумаге" совсем не сложно. Но сделать его будет дороже чем купить уже готовое решение с возможностью модернизации.
Что нужно учитывать:
1. Узнать места где возможно сделать вашу модель, а именно какие программы они используют. Самые распространенные AutoCad, CorelDRAW (по своему опыту). Условия и возможность обработки материалов в данных местах. Возможно нужно заказывать детали в разных местах.
2. Нужно учитывать материалы из которых будет изготавливаться модель: стоимость расходного материала, его обработка (возможность загнуть, точность обработки, физические свойства).
3. Примерно подсчитать стоимость конечного продукта, сравнить с готовыми (подходящими) аналогами.
3. Определиться с пунктами 1, 2, 3 и только после этого изобретать модель.
Эти пункты я проверил на себе.
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Вчера потратил уйму времени, да еще вместо того чтобы отдохнуть после 10 часового раб дня сел опять за комп и пытался запустить модуль GPS в работу... Он не в какую не хотел. Проблема еще в том что нет документации толковой, и схемы надо искать хрен знает где, так как на оф. сайте DFrobot их нету. Делал по инструкциям, те еще инструкции, типа : "сначала переключите перемычку в такое положение, вторую в такое, залейте прошивку, подключите 3-ю перемычку, отключите первую и вторую... бла бла бла..." И конкретно по моей проблеме не сказано, или я упустил.
Модуль мне выдавал полный мусор, и я грешил на неправильно установленные перемычки. Сидел пыхтел, перебирал примеры кодов - не один не работал - выдавал мусор какой-то...
Проблема оказалась в питании ! Я по привычке не подключал доп питание к Aрдуине и юзал ее от 5-вольт USB. Подал стабильные 6-В от БП - все заработало - модуль заработал и я смог позвонить на домашний телефон
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Пробный запуск и вызов по номеру телефона в автоматическом режиме.
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
9211282.jpg
(169.0 Kb)
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
И так ! На сегодняшний день мы умеем работать и снимать показания с УЗ-дальномеров, в данный момент подключил 3 штуки одновременно работающих. Нужно еще 4й, задний, подключить. Я как-то губу раскатал, ошибся с одним ноликом и мне показалось что они дистанцию аж на 24 метра могут мерить )))) FAIL...
Подключу 4й и начну думать над алгоритмом пока простой программы, чтобы бот мог в помещении и на пересеченной местности свободно двигаться, не застревая.
|
|
|
|
|
|
Начальная группа
4 сообщений
Мужчина
|
неплохо
|
|
|
|
|
|