Робот „без мозгов” В последнее время так и получается что собираю разные „игрушкоподобные” конструкций. Вот и пришла очередь рассказать о еще одном роботе который обходит препятствия. Хотя конструкция весьма далека от основной тематики саита- усилителей, Я всё таки надеюсь что хоть начинающим она будет полезна.

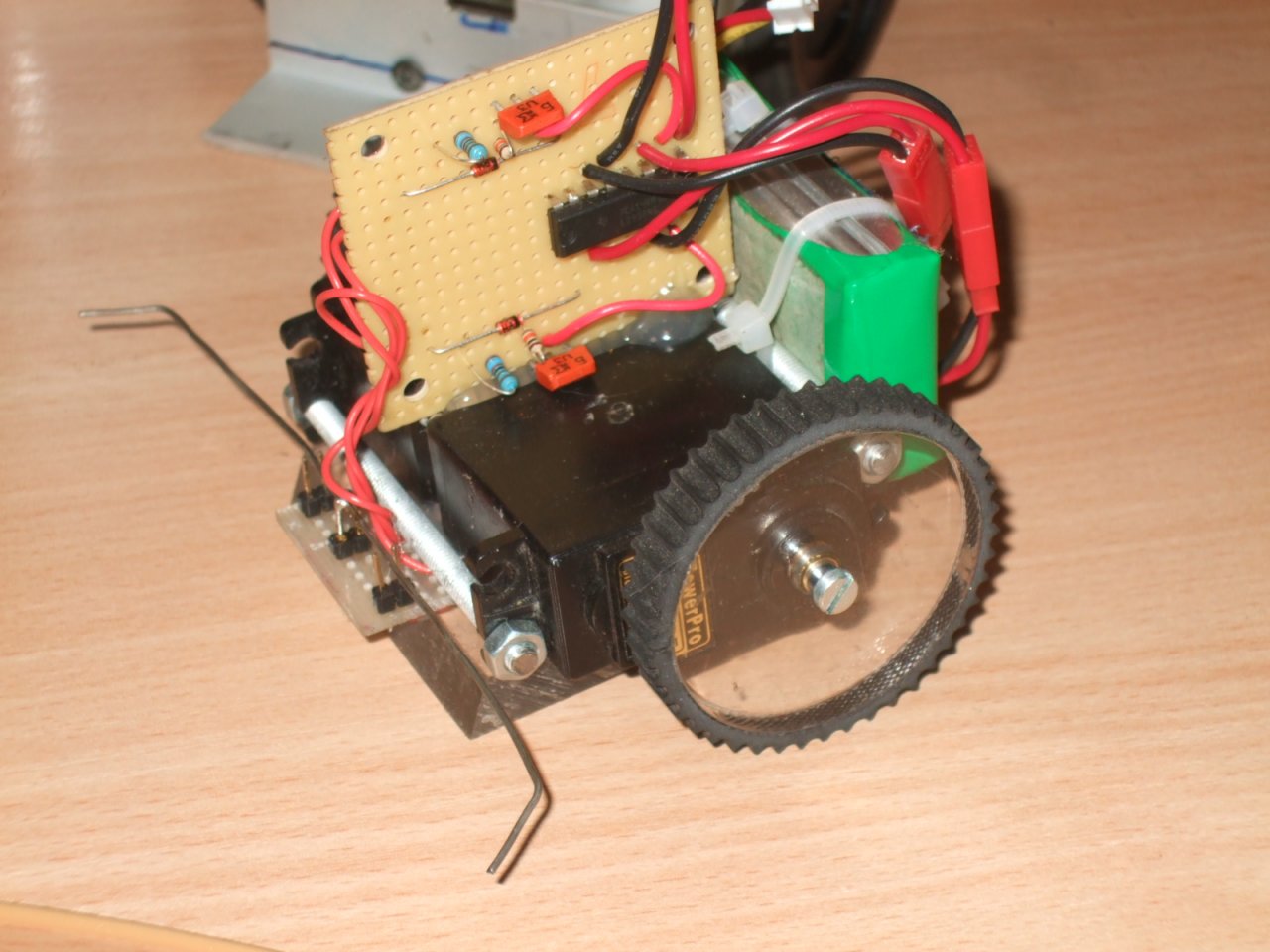
Схема очень проста- кроме микросхемы-драивера и двух транзисторов в ней еще несколько деталей.
Главный элемент схемы-L293D- четырехканальный драивер со встроенными противоЭДС-диодами. Более подробную информацию о микросхеме L293D можете наити в просторах интернета.
Итак-смотрим схему:
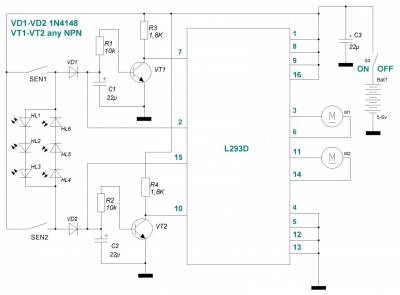
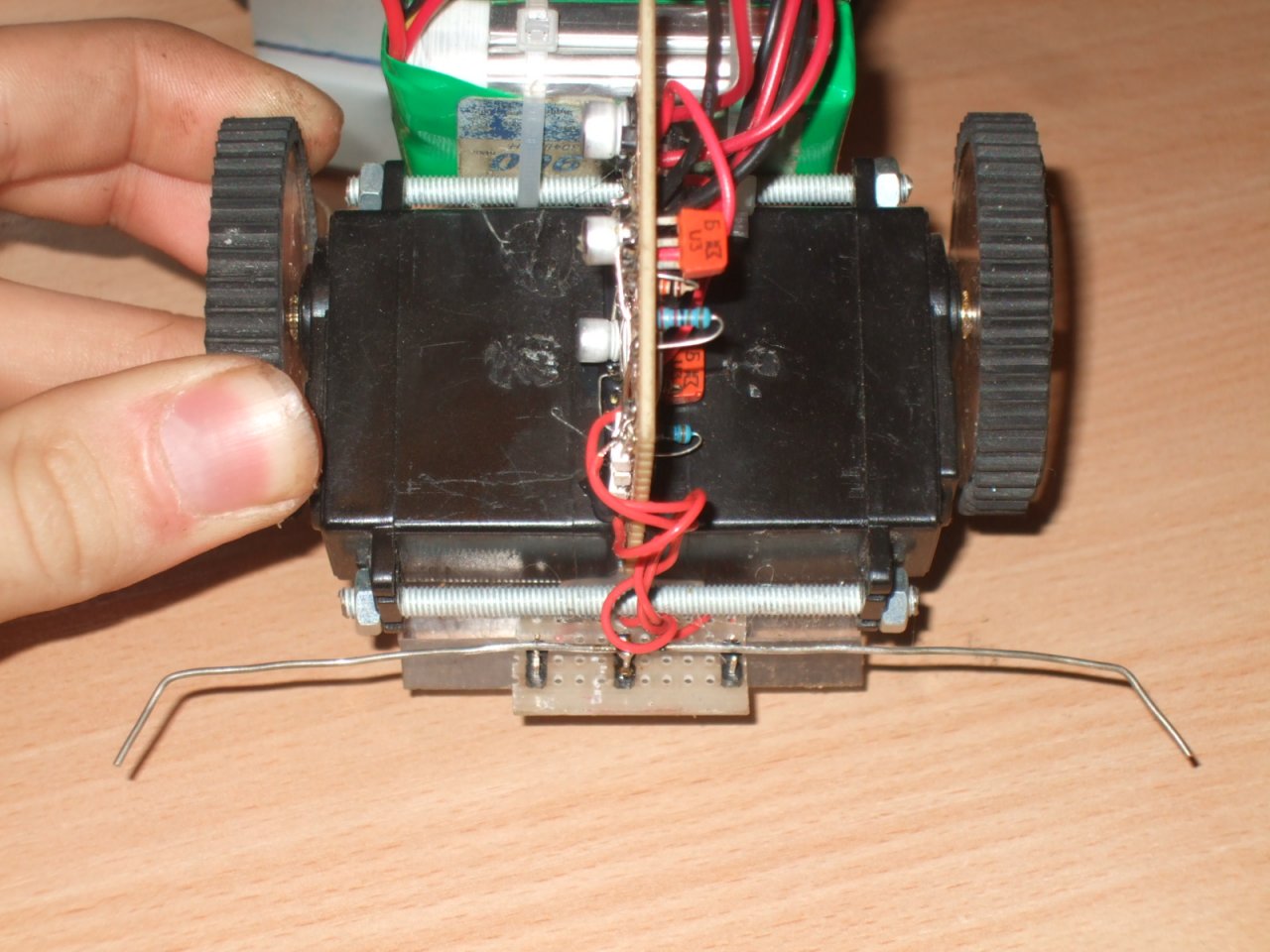
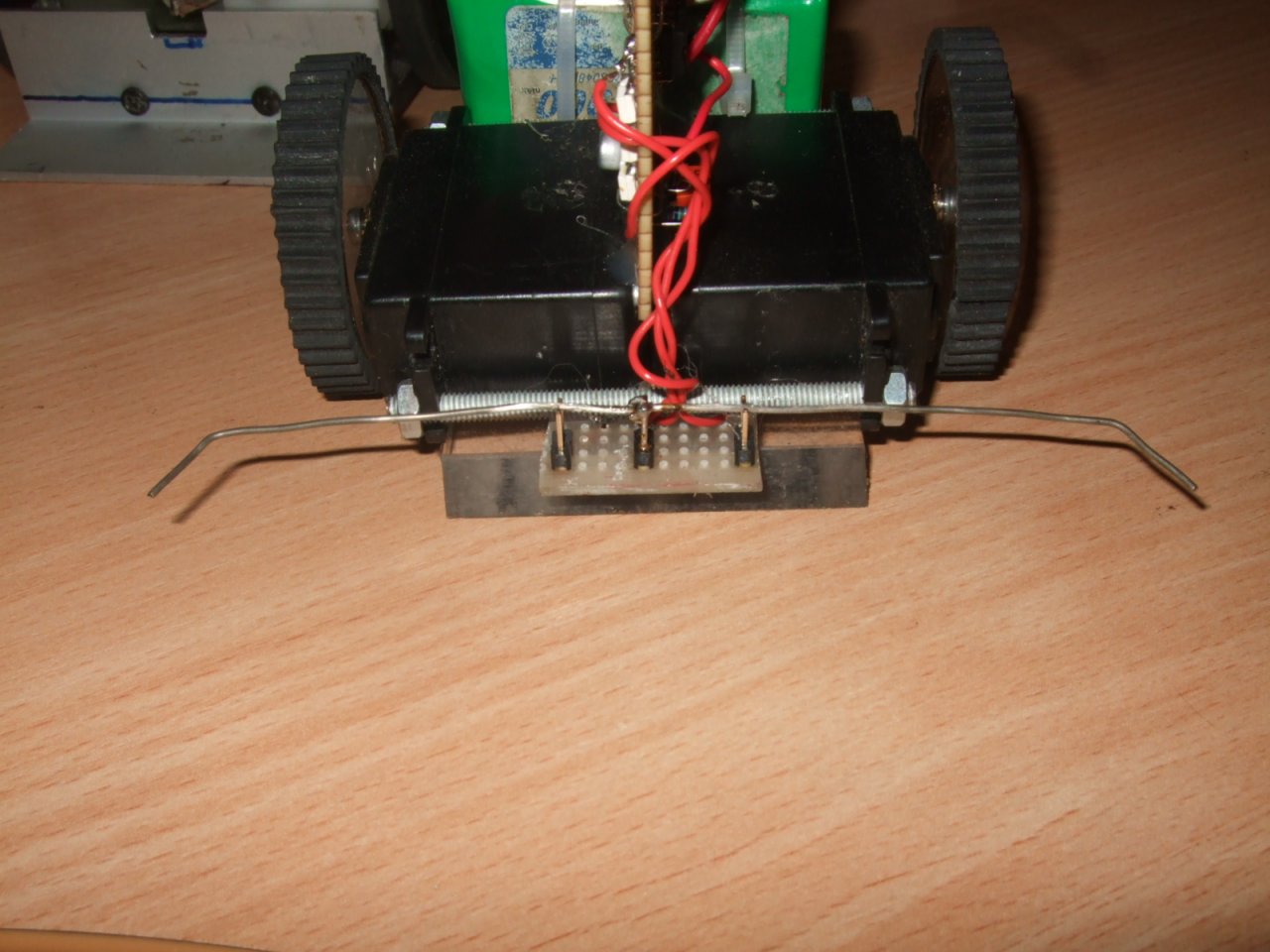
В качестве сенсоров используется два замыкающиеся контакта- „усики” робота. Выводы 7 и 10 микросхемы L293D подтянуты к шине питания +5в (лог.1). Робот при этом движется вперёд. А что произоидёт при столкновений с препятствием? Допустим замкнулся сенсор SEN1. В это время конденсатор C1 заряжается через диод VD1. За одно на вывод 2 поступает +5в (лог.1).Также ток потекает через цепочку из светодиодов HL1-HL3 и диод VD2 и заряжает конденсатор C2, на вывод 15 тоже окажется лог.1. Но так как на светодиодах падает доля напряжения то заряд накопленный C2 окажется меньше чем на C1.При поступлений лог.1 на выводы 2 и 15 оба мотора реверсируется. После этого заканчивается заряд С1 и С2 и открываются транзисторы VT1 и VT2. Оба конденсатора разряжаются через базовые резисторы и переход Б-Е транзисторов. Так как в этот момент оба транзистора открыты ножки 7 и 10 драивера сбрасывается на общий провод (лог.0). Моторы опять реверсируется но тут продолжительность реверса определяет заряд конденсаторов. Первый в нормальное состояние переидёт транзистор VT2, мотор М2 будет двигать робота вперёд. А М1 будет реверсирован до того пока не разрядится С1. Таким образом осушествляется поворот робота. И это всё без всяких МК!
Вам еще не надоело? Нет? Тогда поехали дальше!