|
Робот TVA v1.0
|
|
Участник
25 сообщений
Мужчина
|
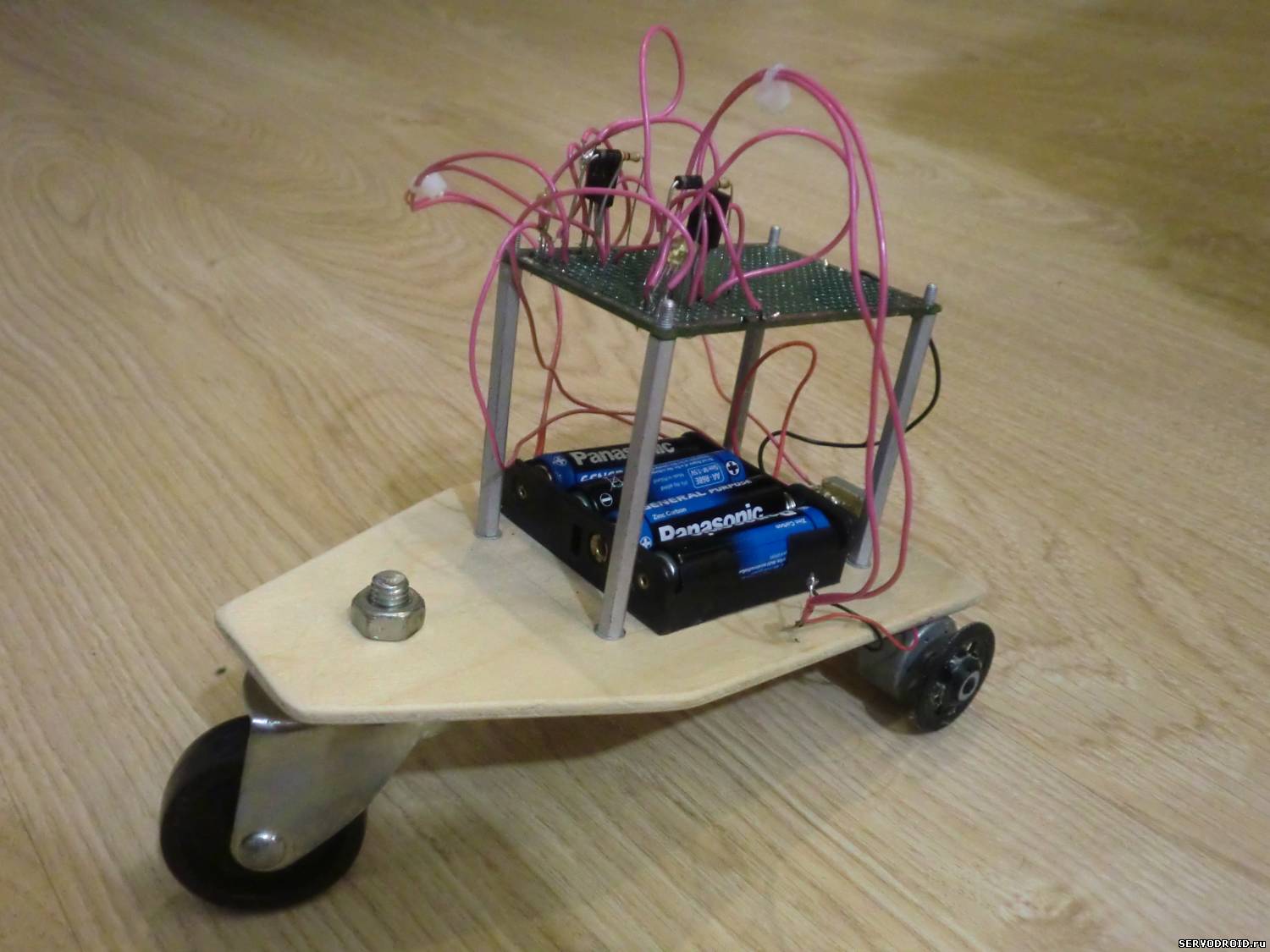
Сделал вот вчера робота по схеме, изложенной здесь: http://www.servodroid.ru/news/2009-08-19-46
Вот, что у меня получилось:

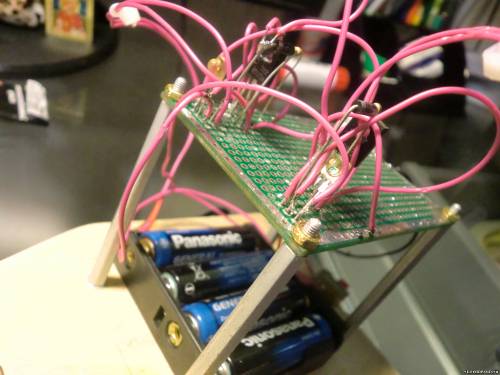
Правда эм... Есть одна проблемка... На свет он ходить так и научился... 
Моторчики крутятся неостанавливаясь и он тупо едет вперед, не поворачивая. В темноте пробовал - не останавливаются. Наверное, что-то где то замыкается или запаял неправильно. Сейчас в схеме разобраться сложно... 
7648486.jpg
(124.3 Kb)
·
5771705.jpg
(126.3 Kb)
·
9070605.jpg
(141.1 Kb)
То, что мы знаем - ограничено.
А то, чего мы не знаем - бесконечно...
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Tomas,
Конструкция красивая, но есть пару НО:
- колеса с моторов сними. Такой робот должен ехать либо на самой оси мотора(да, прям ей по полу) либо на оси этой же но с кембриком.
- не поворачивает...может из-за инерции, или см пункт выше.
 Добавлено (15.01.2012, 22:33)
---------------------------------------------
Найди или вытащи моторчики на 3-6 в из детских игрушек, они более менее подходят, да и оси у них длиннее 
Еще как тебе сказали в БОЛТАЛОЧКЕ- поставить редуктор. Можно из перевертыша. Перевертыш-игрушка такая, которая когда упадет набок, то все равно встанет на колеса...типа Добавлено (15.01.2012, 22:36)
---------------------------------------------
|
|
|
|
|
|
Участник
25 сообщений
Мужчина
|
Спасибо, S-T-A-L-K-E-R(А)!
Я попробую сделать то, что ты описал выше.
Но есть одно НО: я видимо где-то ошибся в схеме и робот никак не реагирует на свет (что в темноте моторчики работают, что на свету). В схеме теперь разобраться сложно...
То, что мы знаем - ограничено.
А то, чего мы не знаем - бесконечно...
|
|
|
|
|
|
Участник
182 сообщений
Мужчина
|
Tomas, Моторчики для этой конструкции не подходящие ты взял. Если не найдешь перевертышей, то пробуй сделать редуктор сам, это вовсе не трудно (понадобятся всего то 4 шестерни, а если не хватит для тяги, то 6). Не забудь на мотор одевай самую маленькую, а на ось колеса самую большую. И еще сама конструкция с огромным минусом: смотри у тебя слишком большое колесо (третье, крутящееся во все стороны), точнее сказать не слишком большое, а большого диаметра. Поэтому весь центр тяжести приходится на моторы. Твоя конструкция будет быстрее и увереннее ездить, если все три точки опоры (колеса) будут находиться на одном уровне.
Роботы, пережившие временную остановку электропитания, рассказывают о синем экране в конце тоннеля...
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Quote (Tomas) Но есть одно НО: я видимо где-то ошибся в схеме и робот никак не реагирует на свет (что в темноте моторчики работают, что на свету). В схеме теперь разобраться сложно...
- будешь на сайте, напиши мне в ЛС, потом в болталочку пойдем, будем общаться...
|
|
|
|
|
|
Участник
25 сообщений
Мужчина
|
Quote ({{TNT}}) И еще сама конструкция с огромным минусом: смотри у тебя слишком большое колесо (третье, крутящееся во все стороны), точнее сказать не слишком большое, а большого диаметра. Поэтому весь центр тяжести приходится на моторы. Твоя конструкция будет быстрее и увереннее ездить, если все три точки опоры (колеса) будут находиться на одном уровне.
Да я уж знаю... Просто что было в магазине, то и купил. Самое маленькое из колес было. Пришел домой-получилось, что прогадал я с диаметром. Но деваться было некуда - пришлось устанавливать... Оно вообще само по себе то крутится не очень таки хорошо...
Quote (S-T-A-L-K-E-R(А)) - будешь на сайте, напиши мне в ЛС, потом в болталочку пойдем, будем общаться...
Да я тут не очень частый гость, сам пойми, дел много. Но как буду и ты будешь в сети - обязательно напишу. А так мне можно писать в ICQ: 381948749 или найти в ВКонтакте: http://vkontakte.ru/vlad_tomin.
То, что мы знаем - ограничено.
А то, чего мы не знаем - бесконечно...
|
|
|
|
|
|
Участник
25 сообщений
Мужчина
|
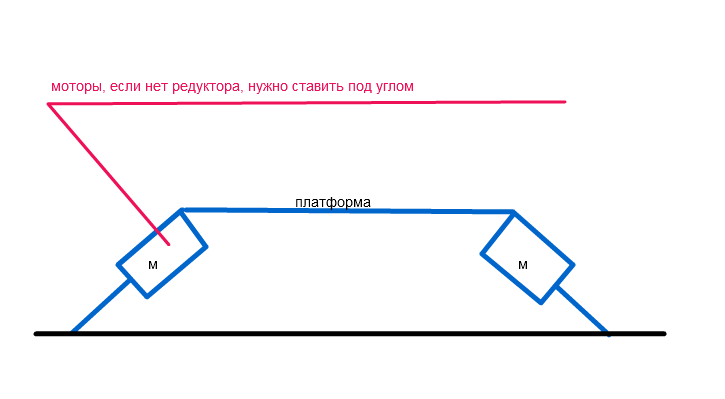
Кстати, S-T-A-L-K-E-R(A), ты в своем первом посте обрисовал схему, как разместить моторчики под углом. Это понятно. А вот как бы мне сделать так, чтобы они были под наклоном и еще держались на моей конструкции? Здесь я просто сажал их на термоклей, что не есть хорошо при наклонном методе расположения - наверняка отвалятся, т.к. площадь склеивания маленькая. Есть какие идеи по установке?
То, что мы знаем - ограничено.
А то, чего мы не знаем - бесконечно...
|
|
|
|
|
|
Модераторы
174 сообщений
Мужчина
|
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Quote (Tomas) я просто сажал их на термоклей, что не есть хорошо при наклонном методе расположения - наверняка отвалятся, т.к. площадь склеивания маленькая.
- мы в кружке сажаем на терму или на двухсторонний скотч. Оба варианта долго не держат ) Хомуты тоже не ахти вариант. можно в принципе и хомутами клеем )
И, это, теперь ответь по пунктам:
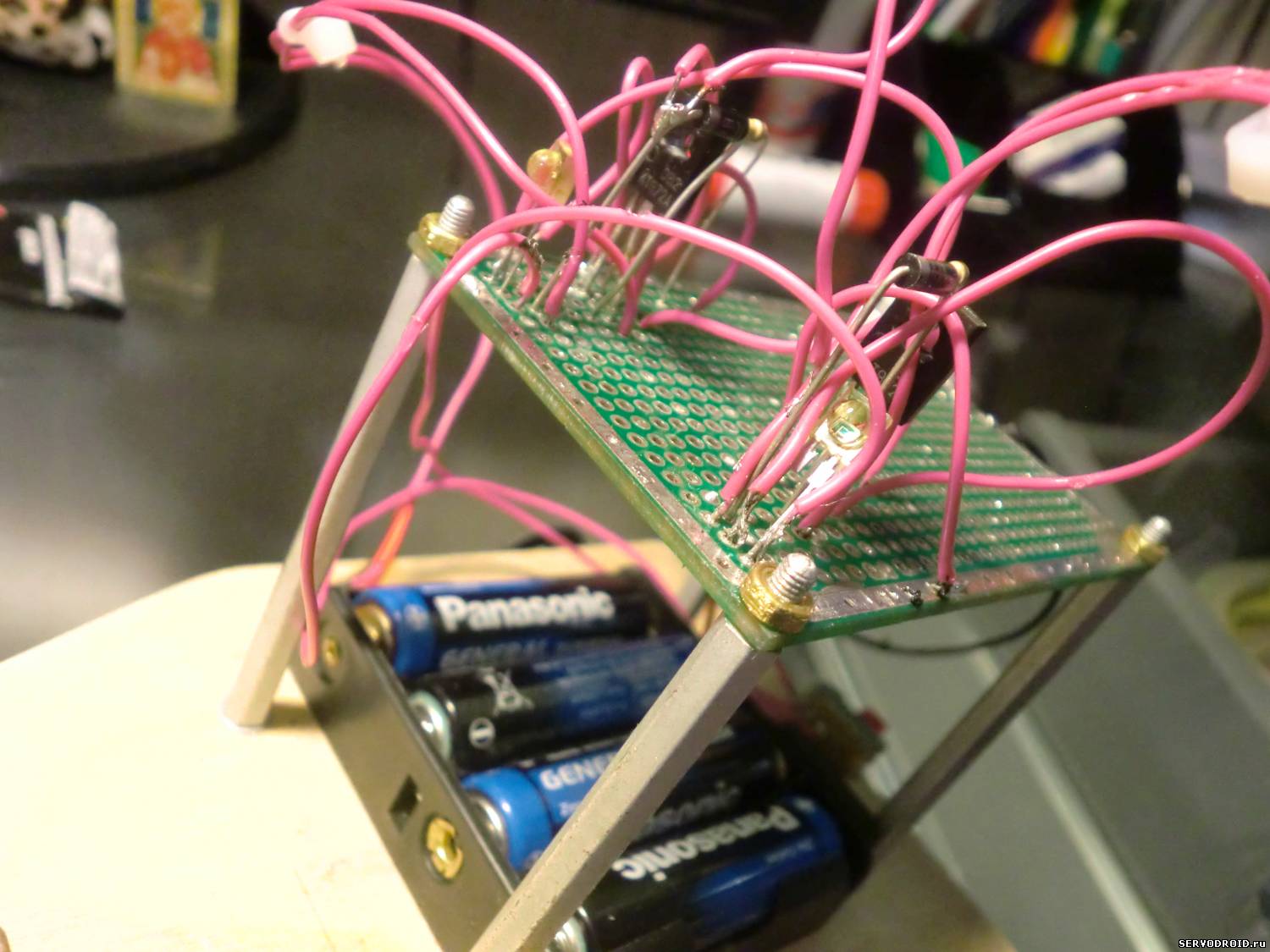
1. Куда ведет провод от ножки К(коллектор) у транзисторов КТ972 ?
2. Куда ведет провод от ножки Э(эммитер) у того и другого ?
3. Куда идет провод от ножки Б(база) у того и у другого ?
4. Длинная ножка ФТ(фототранзистора) куда подключена ? Куда подключена короткая ?
5. Мотор крутится при засветке одного из транзисторов ? Или крутятся оба при засветке одного или другого ФТ ?
5. Это точно ФТ ? Откуда выковырял ? Похоже на ИК-диод.
|
|
|
|
|
|
Участник
25 сообщений
Мужчина
|
Нашел интересный способ крепления моторов: [ссылки на данный ресурс запрещены.] Вроде на первый взгляд надежно.
То, что мы знаем - ограничено.
А то, чего мы не знаем - бесконечно...
|
|
|
|
|
|