14:59 СВЕТОФИЛЛ НА БАТАРЕЙКЕ |
 Светофилл на батарейке - это небольшой робот, который конструктивно выполнен в форме таракана. Его главное
отличие от аналогичных роботов питание всего от
одной батарейки напряжением 1,5 вольта. Робот называется светофилом, потому что он способен передвигаться за источником светаВысокая чувствительность к свету
позволяет роботу бегать за световым "зайчиком" на полу,
от луча света фонаря не направленным на
его фотоэлементы. Робот воспринимает отражённый
свет! |
***
1.ВИДЕОТЕСТЫ РОБОТА
На приведённых видеофрагментах (плейлист в
проигрывателе) последовательно показано управление роботом лучом света от фонаря. На видео отлично видна манёвренность и скорость передвижения при достаточно ярком источнике света.
Через панель навигации видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель навигации доступна после запуска видео, справа внизу значок пиктограммы. Перед запуском каждого видеофрагмента автоматически выводится его название в верхнем левом углу. В нижней части окна проигрывателя слева название плейлиста и количество сгруппированных видеофрагментов.
Через панель навигации видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель навигации доступна после запуска видео, справа внизу значок пиктограммы. Перед запуском каждого видеофрагмента автоматически выводится его название в верхнем левом углу. В нижней части окна проигрывателя слева название плейлиста и количество сгруппированных видеофрагментов.
Видеофрагменты 1-8
ВСЕ РОБОТЫ на канале DROID1020 !!! подпишись и смотри. Переход по ссылке жми!
ALL ROBOTS on the DROID1020 channel! ! ! be signed and look. Transition according to the link
ALL ROBOTS on the DROID1020 channel! ! ! be signed and look. Transition according to the link
2.ХАРАКТЕРИСТИКИ И ФУНКЦИОНАЛЬНОСТЬ.
В качестве источника света использован фонарик с лампой накаливания. Как уже было сказано выше робот-светофил бежит за световым пятном впереди. Поэтому алгоритм передвижения следующий. Если световое пятно расположено приблизительно на равном расстоянии от левого и правого фотодиода, то робот бежит вперёд. Если световое пятно расположено ближе к левому фотодиоду, то он поворачивает влево. Если световое пятно расположено ближе к правому фотодиоду, то светофил поворачивает вправо. На фото.1 и 2 показан робот светофил в сборке. На рис.1 показаны реакции робота на источник света.
нажимайте фото для просмотра в полном размере.
 фото.1 | 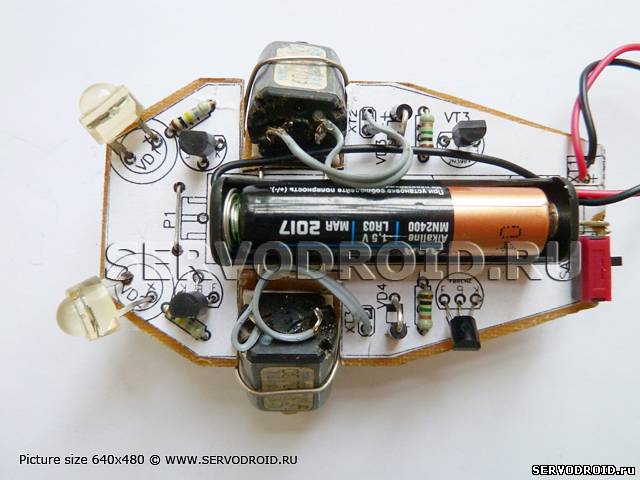 фото.2 | 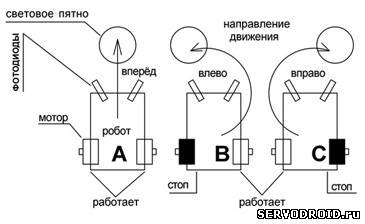 Рис.1 |
Включают робота с помощью микровыключателя расположенного в задней части корпуса. После включения питания если в помещении будет не достаточно освещения. робот останется стоять на месте. Направьте на область перед роботом луч света от фонарика и робот отреагирует движением к источнику света.
 | КОМПОНЕНТЫ КОНСТРУКЦИИ РОБОТА 1. Микровыключатель трёхвыводный. 2. Батарейка типоразмера "AAA" 1,5В. 3. Моторы FF-030-PK низковольтные. 4. Футляр для батарейки "AAA". 5. Шаблон монтажного чертежа. 6. Фотодиод ФД263. 7. Протектор для предотвращения проскальзывания. 8. Крепёж мотора. 9. Разъём и провод подключения мотора. 10.Разъём и провод подключения источника питания. ПРИМЕЧАНИЕ.1.Батарейку типоразмера "AAA" не рекомендуется заменять на "AA", так как общий вес робота будет больше, а скорость перемещения меньше, возрастёт инерционность. ПРИМЕЧАНИЕ.2.На монтажном чертежеP1-перемычка, в качестве которой установите одножильный провод (можно использовать вывод от радиодетали, например резистора). Фото.2.нажимайте фото для просмотра в полном размере. |
3.ПРИНЦИП РАБОТЫ.
Электрическая схема представлена на рис.1. После установки батарейки в футляр робот находится в выключенном состоянии. Включают робота с помощью микровыключателя SA1. После
включения питания, если фотодиоды не освещены, робот неподвижен. Разберём почему это происходит. Пока фотодиоды VD1,VD2 не освещены, на базовые
выводы транзисторов VT1,VT2, через резисторы R1,R2 поступает положительный
потенциал и закрывает эти транзисторы. Соответственно на базовых выводах
транзисторов управляющих моторами VT3,VT4 присутствует отрицательный
потенциал, который тоже их закрывает. Ток через моторы M1,M2 не идёт, робот
неподвижен.
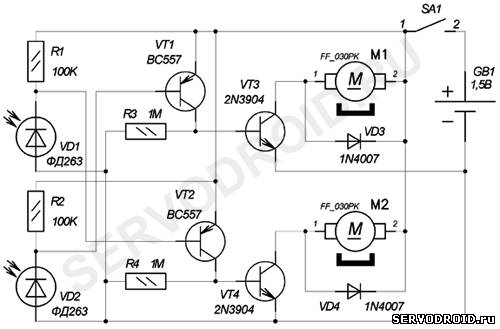 Рис.2.Принципиальная электрическая схема. | Если осветить лучом света фотодиод VD1, то его обратное сопротивление уменьшиться и на базовом выводе транзистора VT2 появится минусовой потенциал, который откроет транзистор VT2. Через переход эмиттер-коллектор транзистора VT2 потечёт ток и на базовом выводе транзистора VT4 отрицательный потенциал смениться положительным. Транзистор VT4 откроется и подключит левый по схеме вывод мотора M2 к минусу источника питания. Через мотор M2 потечёт ток и робот придёт в движение. Аналогично работает и часть схемы связанная с фотодиодом VD2 и транзисторами VT1,VT3. Если освещены оба
фотодиода VD1,VD2, то соответственно откроются выходные транзисторы VT3,VT4 и
моторы M1,M2 будут работать одновременно. Робот поедет прямо. Общая
чувствительность усилительной части схемы к свету такова, что робот реагирует
на солнечный свет из окна и даже свет настольной лампы! Диоды VD3,VD4 защищают транзисторы
VT3,VT4 от индукции тока моторов. |
4.ДЕТАЛИ И МАТЕРИАЛЫ.
Печатная
плата
изготовлена из односторонне фольгированного листа стеклотекстолита
толщиной 1-1,5мм. Размеры печатной платы 80х45мм. Ссылка на архив с чертежами и разводкой под ЛУТ размещена в конце статьи. Список радиокомпонентов приведён в таблице.1.
Таблица.1.Список радиокомпонентов.
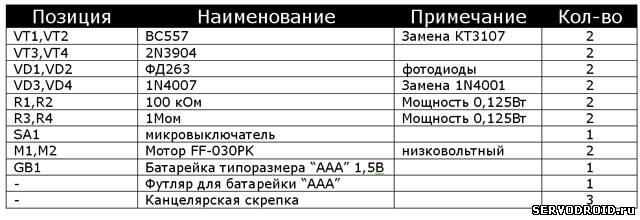
Все
резисторы импортного или отечественного производства мощностью 0,125Вт.
Оксидные (полярные) конденсаторы рекомендуется устанавливать
малогабаритные. Источник питания (батарейка) установлена в односекционном футляре. В качестве протекторов на валы моторов для предотвращения проскальзывания одевают стандартные пластмассовые муфты.
Топологическое расположение выводов фотодиода ФД263 показано на фото.3. Обратите внимание на широкую часть вывода у основания корпуса (указывает чёрная стрелка), это вывод катода (минус) фотодиода.
На фото.4. показан сухой клеевой карандаш с помощью которого проводится приклеивание монтажного чертежа на печатную плату.
Протектор для улучшения сцепления с поверхностью показан на фото.5. В качестве протектора устанавливают пластмассовую муфту именно с ней получены неплохие результаты по скорости передвижения на поверхности. Показанная на фото.5. муфта комплектуется для некоторых типов моторов или может быть приобретена отдельно в магазине по продаже радиодеталей.
5.ИНСТРУКЦИЯ ПО СБОРКЕ РОБОТА.
Для правильной сборки придерживайтесь инструкций по сборке. Редактировать, масштабировать чертежи в архиве нельзя, так как все чертежи архива в точных размерах.
1.Изготовление печатной платы.
Печатная плата выполняет функцию корпуса и основания для монтажа радиокомпонентов, она имеет сложную форму. Чтобы правильно её изготовить, вырежьте из фольгированного стеклотекстолита прямоугольник размерами 80х45мм. Распечатайте рисунок печатной платы (в архиве) и через копирку переведите контуры робота. Вырезайте ножницами по металлу сложную форму. Прорези для загиба под крепёж моторов делать пока не нужно!
Термоклише из архива, распечатайте на глянцевой бумаге. Переведите рисунок термоклише методом ЛУТ (лазерно-утюжный). После травления и промывки водой с помощью ножниц по металлу выполните вырезы в области крепежа моторов до уровня отмеченного жирной линией. Эта линия хорошо видна на рисунке монтажной платы (рис.2).
Распечатайте сборочный (монтажный) чертёж (рис.2). Вырезайте его по контуру и наклейте используя сухой клеевой карандаш (фото.4) на поверхность изготовленной печатной платы со стороны установки радиокомпонентов.
После изготовления печатной платы выполните лужение токоведущих дорожек и крепёжных площадок(1) моторов (фото.6). Просверлите по два отверстия(2) на каждой крепёжной площадке (фото.6).
Топологическое расположение выводов фотодиода ФД263 показано на фото.3. Обратите внимание на широкую часть вывода у основания корпуса (указывает чёрная стрелка), это вывод катода (минус) фотодиода.
На фото.4. показан сухой клеевой карандаш с помощью которого проводится приклеивание монтажного чертежа на печатную плату.
Протектор для улучшения сцепления с поверхностью показан на фото.5. В качестве протектора устанавливают пластмассовую муфту именно с ней получены неплохие результаты по скорости передвижения на поверхности. Показанная на фото.5. муфта комплектуется для некоторых типов моторов или может быть приобретена отдельно в магазине по продаже радиодеталей.
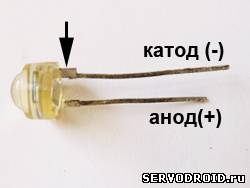 Фото.3. |  Фото.4. |  Фото.5. |
5.ИНСТРУКЦИЯ ПО СБОРКЕ РОБОТА.
Для правильной сборки придерживайтесь инструкций по сборке. Редактировать, масштабировать чертежи в архиве нельзя, так как все чертежи архива в точных размерах.
1.Изготовление печатной платы.
Печатная плата выполняет функцию корпуса и основания для монтажа радиокомпонентов, она имеет сложную форму. Чтобы правильно её изготовить, вырежьте из фольгированного стеклотекстолита прямоугольник размерами 80х45мм. Распечатайте рисунок печатной платы (в архиве) и через копирку переведите контуры робота. Вырезайте ножницами по металлу сложную форму. Прорези для загиба под крепёж моторов делать пока не нужно!
Термоклише из архива, распечатайте на глянцевой бумаге. Переведите рисунок термоклише методом ЛУТ (лазерно-утюжный). После травления и промывки водой с помощью ножниц по металлу выполните вырезы в области крепежа моторов до уровня отмеченного жирной линией. Эта линия хорошо видна на рисунке монтажной платы (рис.2).
Распечатайте сборочный (монтажный) чертёж (рис.2). Вырезайте его по контуру и наклейте используя сухой клеевой карандаш (фото.4) на поверхность изготовленной печатной платы со стороны установки радиокомпонентов.
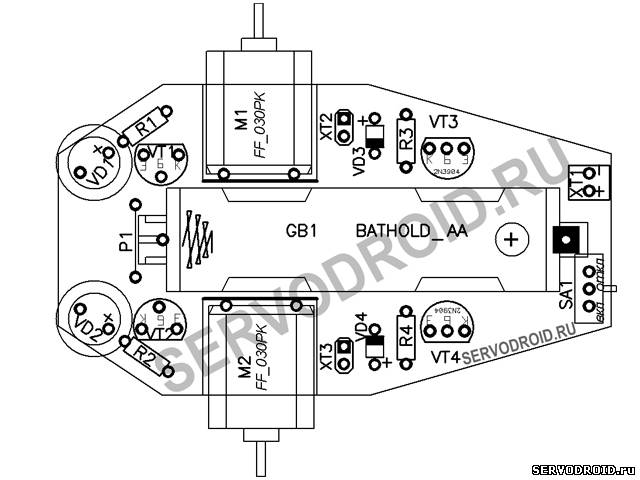 Рис.2.Монтажный чертёж |  Фото.6.Лужение поверхности. |
После изготовления печатной платы выполните лужение токоведущих дорожек и крепёжных площадок(1) моторов (фото.6). Просверлите по два отверстия(2) на каждой крепёжной площадке (фото.6).
2.Подготовка крепёжных площадок для моторов.
На фото.7 и фото.8 показан сгиб крепёжных площадок для моторов под углом. На фото.9 вид с торца позволяет визуально оценить угол сгиба крепёжных площадок.
Для того чтобы выгнуть крепёжные площадки как на фото.7 и фото.8 используйте по монтажный чертеж рис.2. Найдите на монтажном чертеже места установки моторов и определите толстые линии расположенные рядом с футляром батарейки. Эти толстые линии и есть места сгиба. На печатной плате область сгиба будет проходить недалеко от отверстий. В области этого сгиба необходимо шилом проделать канавку (показана красными стрелками), а с боков площадки выполнить спил ножовкой по металлу или ножницам по металлу. Сгиб лучше выполнять с помощью плоскогубцев.
нажимайте фото для просмотра в полном размере
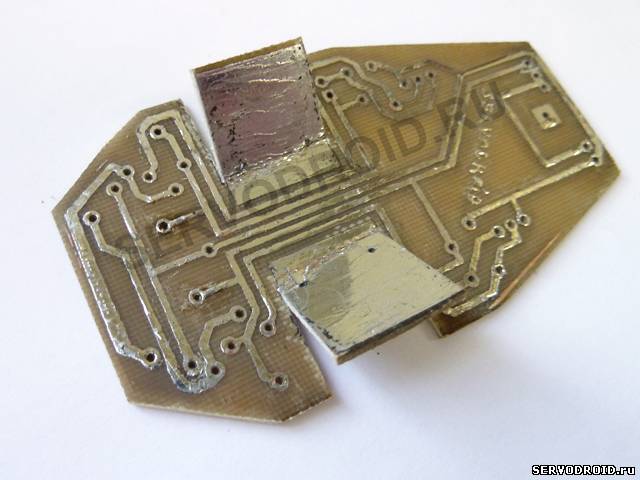 Фото.7. |  Фото.8. |  Фото.9. |
Заранее подготовленный монтажный чертёж (фото.10) приклеивайте на поверхность печатной платы сухим клеем. Вам необходимо добиться, чтобы все отверстия совпали. Для этого во время приклеивания шилом поправляйте не совпадающие отверстия. Качество такого склеивания не имеет значения, так как после напаивания радиокомпонентов, они будут удерживать рисунок монтажного чертежа.
Возьмите металлическую канцелярскую скрепку и выпрямите её в пруток. Так как для крепежа потребуется два прутка, то аналогичные действия выполните и со второй скрепкой. Проденьте оба прутка в отверстия на крепёжной площадке моторов как показано на фото.11. Загните и запаяйте концы скрепок со стороны лужения поверхности обоих площадок (фото.12). Следите за тем, чтобы угол сгиба крепёжных площадок соответствовал углам (35-45 град) на фото.9.
нажимайте фото для просмотра в полном размере
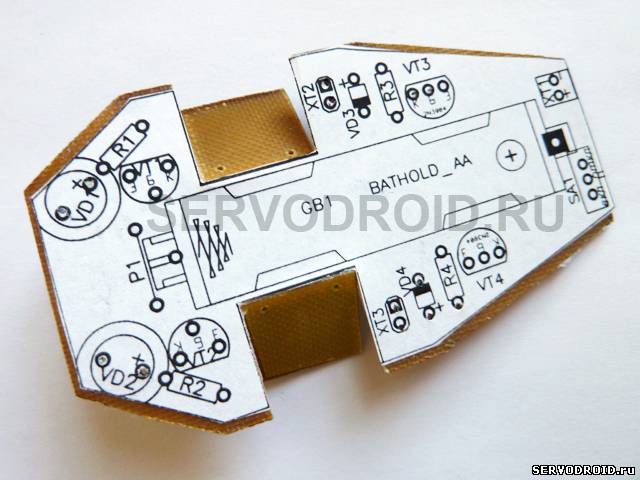 Фото.10. | 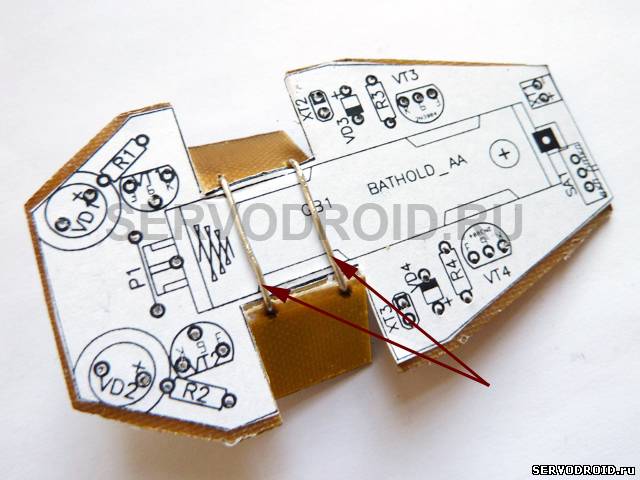 Фото.11. |  Фото.12. |
3.Монтаж радиокомпонентов.
Выполните монтаж радиокомпонентов (фото.18) в соответствии с чертежом монтажной платы (рис.2) и списком радиокомпонентов в табл.1. На фото.18 показан правильный монтаж основных радиокомпонентов конструкции робота. Обратите внимание на позиции диодов VD3,VD4. Их удобнее устанавливать вертикально, собственно под такую установку и рассчитаны их посадочные места.
Фотодиоды установите на позиции так чтобы они были направлены в сторону друг от друга и не отогните их немного вверх. Это необходимо для того, чтобы расширить угол обзора робота (фото.13)
На позицию батарейки необходимо установить односекционный футляр (фото.14). Его тип должен соответствовать типу источника питания. Приклейте на днище футляра строительный двусторонний скотч. Такой скот обладает очень липкой основой и высокой клеющей способностью. Иными словами приклеив его раз, затем трудно оторвать от поверхности, поэтому будьте внимательны в процессе приклеивания скотча, не допускайте бугристых или неровных областей (фото.15).
нажимайте фото для просмотра в полном размере
 Фото.13. |  Фото.14. |  Фото.15. |
Снимите защитную ленту со второй поверхности двухстороннего скотча. Установите футляр для батарейки на позицию и с силой прижмите его (фото.16). После этого скотч сцепит поверхность печатной платы и футляра. Подпаяйте красный и черный проводки идущие от футляра. Красный провод-это плюс источника питания, чёрный-минус источника питания. Подключение источника питания выполняют к разъёму указанному как XT1 на монтажном чертеже с учётом полярности.
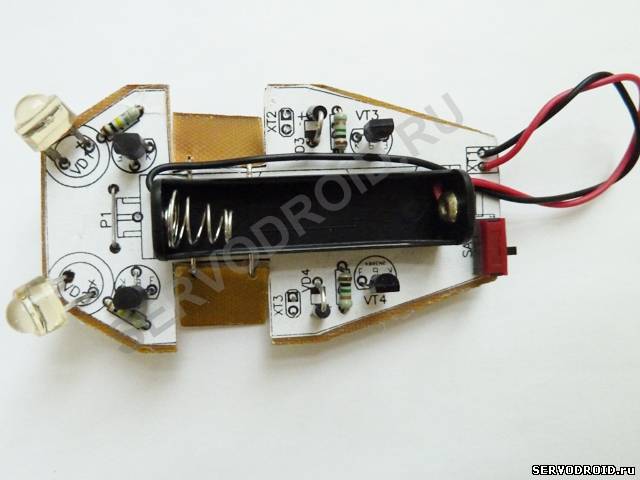
Фото.16.Нажимайте фото для увеличения.
4.Установка и монтаж моторов.
Моторы устанавливают на крепёжных площадках. Чтобы надёжно зафиксировать каждый из моторов приклейте на поверхности крепёжных площадок полоски двустороннего скотча (фото.17). Двусторонний скотч устранит проскальзывание после крепежа хомутом из скрепки. Установите моторы на позиции и сильно прижмите их (фото.18).
Подключите моторы к рядом расположенным позициям с помощью монтажного провода. В авторском варианте моторы были непосредственно подпаяны к позиции подключения. Лучшим вариантом будет установка на позиции подключения маленьких разъёмов. Тогда при неправильной полярности подключения мотора (робот поворачивает назад или едет назад) можно будет просто переставить вилку разъёма.
Выгните две металлических канцелярских скрепки в пруток. Затем сделайте из скрепок хомутик обернув каждый из моторов (показаны красными стрелками на фото.19).
нажимайте фото для просмотра в полном размере
 Фото.17. |  Фото.18. |  Фото.19. |
Переверните печатную плату (фото.20) скрутите и припаяйте хомуты из скрепок к лужёной поверхности крепёжных площадок. Рекомендуется заранее залудить предполагаемые места пайки на сами скрепках. Для лужения используйте флюс беспромывочный нейтральный.
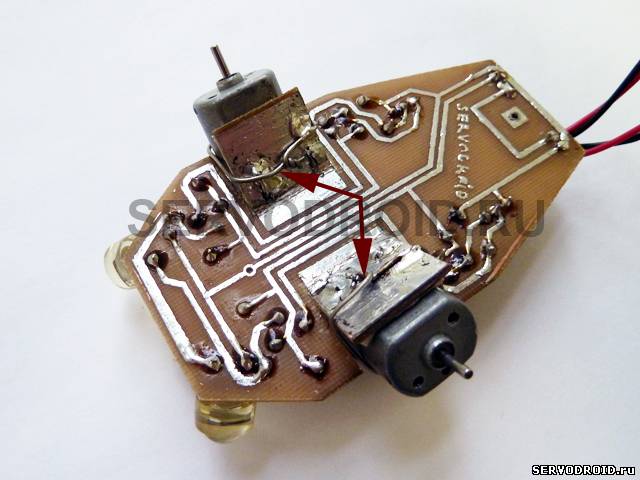
Фото.20.Нажимайте фото для увеличения.
5.Установка задней опоры.
При движении робот опирается на три точки, первые две точки опоры-это валы моторов, а третью опору необходимо изготовить. Третья опора размещается сзади а позиции обозначенной квадратом. Для изготовления опоры подготовьте металлическую скрепку, монтажные пласткогубцы и бокорезы. Выгните скрепку так как показано на фото.21. Лишнюю длину скрепки необходимо отрезать. Проденьте скрепку через отверстие и располагайте так как показано на фото.22. Отрежьте линий участок по указанному пунктиру и запаяйте в областях указанных красными стрелками. На фото.23 показана задняя опора после монтажа с отмеченными красными стрелками участками пайки.
нажимайте фото для просмотра в полном размере
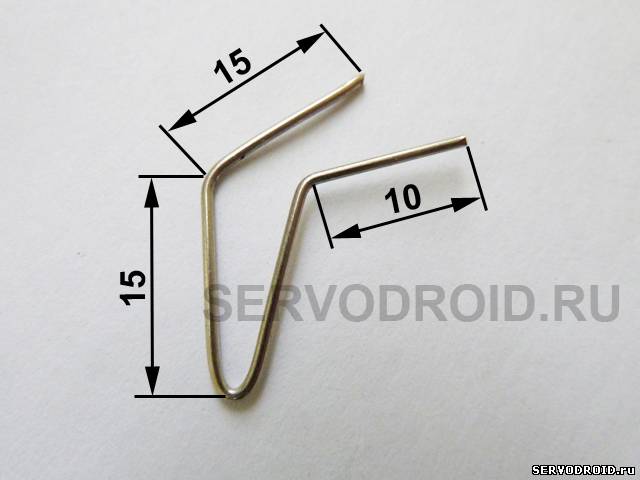 Фото.21. | 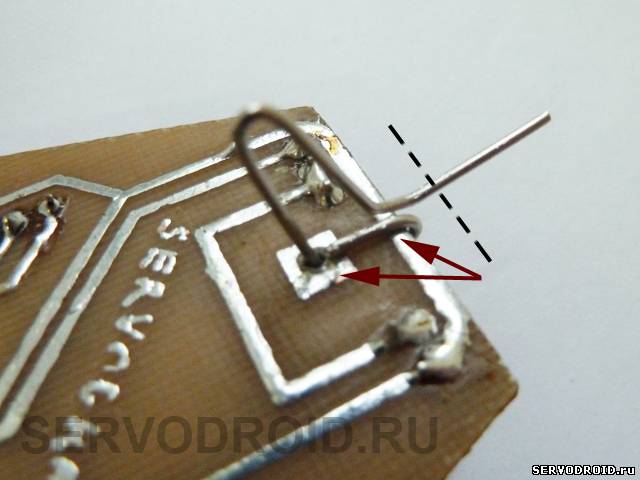 Фото.22. |  Фото.23. |
6.Тестирование робота.
Если монтаж радиокомпонентов выполнен без ошибок, то робот приходит в движение сразу после засветки фотодиодов карманным фонариком. В качестве источника света рекомендуется фонарик на лампах с нитью накаливания, например современных ксеноновых лампах. Начните испытания с засветки обоих фотодиодов одновременно.
Табл.2 ВОЗМОЖНЫЕ ВИДЫ НЕИСПРАВНОСТЕЙ И ИХ УСТРАНЕНИЕ:
| № | НЕИСПРАВНОСТЬ | УСТРАНЕНИЕ |
| 1 | При включении питания робот поворачивает в одну из сторон, фотодиоды не освещены. | Измените полярность подключения выводов мотора вал которого вращается в противоположном направлении (назад). |
| 2 | При освещении обоих фотодиодов робот едет назад | Измените полярность подключения выводов у обоих моторов. |
| 3 | При освещении одного или двух фотодиодов робот не реагирует, стоит а месте. | Замените батарейку, проверьте правильно ли установлены фотодиоды и транзисторы на печатной плате, качество монтажа выводов радиокомпонентов, место пайки выводов подключения к моторам |
| 4 | При освещении фотодиодов робот поворачивает только в одну сторону. | Определите буквенное обозначение фотодиода (рядом с фотодиодом), который не реагирует на источник света. Если не реагирует фотодиод VD1, то проверяйте правильность установки (монтажа) и качество пайки для следующих радиокомпонентов: транзистор VT2, VT4, диод VD4. Если не реагирует фотодиод VD2, то проверяйте правильность установки (монтажа) и качество пайки для следующих радиокомпонентов: транзистор VT1, VT3, диод VD3. |
| 5 | Робот проскальзывает на месте или не двигается вперёд при освещении фотодиодов при свежем источнике питания, схема работает если перевернуть робота. | Замените источник питания или правильно подберите колёса-протекторы. Диаметр колёс должен быть минимально возможным, в противном случае усилие развиваемое валом мотора будет недостаточным для его вращения при установке на поверхность. |
нажимайте фото для просмотра в полном размере
 Фото.24. | 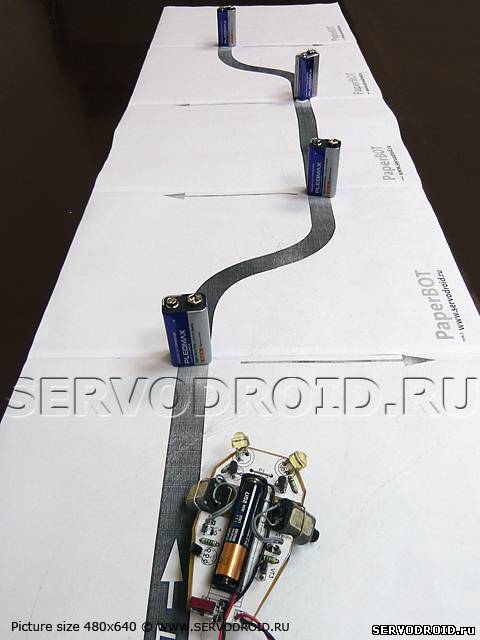 Фото.25. |
7.Установка типа поведения, реакции на источник света.
Первый
вариант поведения- поиск источника света (светофил). Для установки этого типа поведения выводы от каждого
мотора подключайте рядом со своей
позицией (разъёмом).
Второй
вариант поведения- светобоязнь (фотофобик). Для установки этого типа поведения выводы от левого мотора
подключаем к разъёму для правого мотора, а выводы от правого мотора к
разъёму для левого мотора, то есть перекрёстно. Сборка окончена!
В архиве: чертеж в точных размерах теромоклише и монтажный (сборочный)
чертёж. Преобразовывать и редактировать чертежи нельзя! После скачивания
распечатайте чертежи на лазерном принтере. Термоклише распечатайте на глянцевой
бумаге. Используйте термоклише для перевода рисунка на стеклотекстолит по
методу ЛУТ.
Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим!
автор Алексей Высоковольтный www.servodroid.ru
© Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
| Всего комментариев: 39 | |






Ответ: УВАЖАЕМЫЕ ПОСЕТИТЕЛИ И ПОЛЬЗОВАТЕЛИ САЙТА, ПРОСИМ ВАС ЗАДАВАТЬ СВОИ ВОПРОСЫ ПО СТАТЬЯМ В НАШЕЙ ГРУППЕ В ВКОНТАКТЕ (Все общение и все пользователи с сайта, которые смогут вам подсказать или помочь находятся там). Перейти в группу https://vk.com/servodroid_ru

| |

 В схеме же видно, что нет никаких конденсаторов.
В схеме же видно, что нет никаких конденсаторов. 


