|
Помогите сделать апгрейд
|
|
БЛОГГЕР
340 сообщений
Мужчина
|
Доброго времени суток!
Постараюсь изложить просьбу как можно понятней и короче.
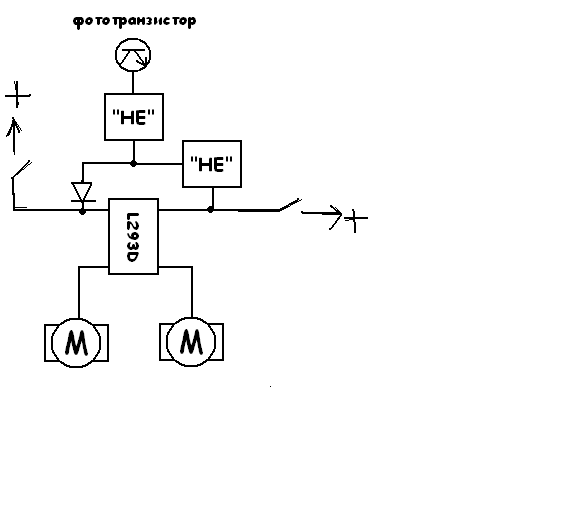
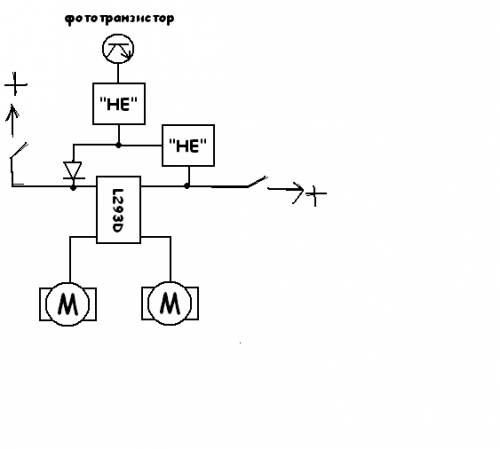
Собрал модуль управления для робота-лайнрейсера по след схеме:
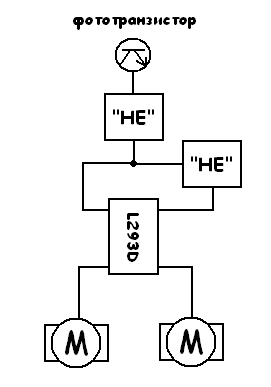
Всё отлично работает. "Видит" даже линии шириной всего 3мм.
Прошу помощи в "обучении" робота обходить препядствия с помошью "усов" (контактных датчиков) или логических элементов.
 Выслушаю любые идеи, советы и поделюсь результатами. Выслушаю любые идеи, советы и поделюсь результатами.
9713497.png
(6.8 Kb)
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Pe40rA,
а В  чем именно проблема ? Вы не знаете как сделать тактильные датчики ? чем именно проблема ? Вы не знаете как сделать тактильные датчики ?
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
 Где 2 выключателя - тактильные датчики.
Диод 1N4148 или 1N4007 - их очень легко достать, можно еще какой-нибудь другой маломощный поставить.
STALKER, робот кстати как дихотом бегает.
9029293.png
(10.8 Kb)
|
|
|
|
|
|
БЛОГГЕР
340 сообщений
Мужчина
|
Вот Сталкер смотри...
Если крутится левый мотор робот едет на право, если правый то на лево поедет (привод задний)
Прикинул: поставлю два "уса" на углы, если препядствие слева то включается правый мотор, препядствие справа включается левый мотор (ситуация такая складывается потому что робот двигается поочерёдно включая два мотора, так сказать рыская из стороны в сторону)
Теперь моделируем ситуацию: робот съехал с линии по неведомым причинам и заехал в угол, "контачат" оба уса, включаются оба мотора, робот упирается в угол до разряда батареи...
Всё доступно объяснил? Вот я застрял на этом моменте.Добавлено (05.03.2011, 23:21)
---------------------------------------------
nightmare, вопрос с углами схема поймойму не решает...
Я идеалом считаю фазбота, выложенного на этом сайте, больно уж он красиво назад отъезжает
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Про проблему с углами я не знал когда рисовал эту схему, держите новый вариант, в котором если робот упрется в угол, то выключит двигатели:
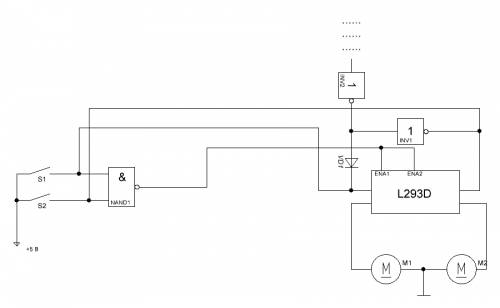 S1,S2 - усы, где правый а где левый решать вам.
0991174.gif
(6.3 Kb)
·
4872654.spl7
(7.6 Kb)
|
|
|
|
|
|
БЛОГГЕР
340 сообщений
Мужчина
|
nightmare, большое спасибо! 
Просто и понятно!
В продолжение темы, кто как-то ещё дорабатывал свои творения? Может обучал новым трюкам, функциям (к роботам на МК это не относится)
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Мне не чем поделиться, на логике не собирал 
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Я темболее, сейчас другими делами занимаюсь 
|
|
|
|
|
|
БЛОГГЕР
101 сообщений
Мужчина
|
а какую фотопару использовал??
|
|
|
|
|
|
БЛОГГЕР
340 сообщений
Мужчина
|

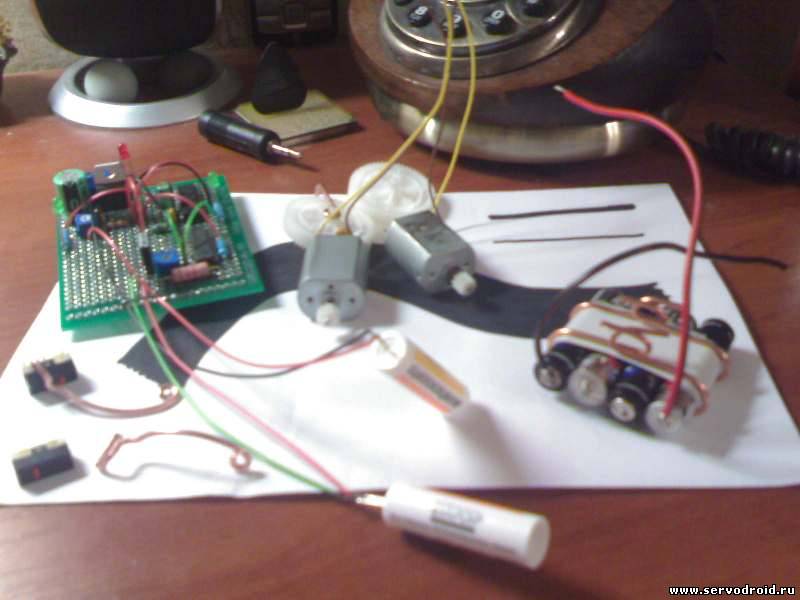
Вот все "органы" моего робота... Elektro, использовал светодиод (белый, 3мм) и фототранзистор (3мм, пластик).
Всё работает в диапозоне видимого света Добавлено (07.03.2011, 22:47)
---------------------------------------------
Засунул их в пластиковые колпачки. Уменьшило световое пятно у светодиода, меньше помех у фототранзистора (надо бы ещё непрозрачной краской покрасить )
6197353.jpg
(46.8 Kb)
|
|
|
|
|
|
Администраторы
3417 сообщений
Мужчина
|
Quote (Pe40rA) Засунул их в пластиковые колпачки. Уменьшило световое пятно у светодиода, меньше помех у фототранзистора (надо бы ещё непрозрачной краской покрасить
-купи изоляцию, как там ее называют...забыл. Которую нагреваешь и она в половину своего диаметра сужается.
|
|
|
|
|
|
БЛОГГЕР
340 сообщений
Мужчина
|
S-T-A-L-K-E-R(А), ты про термоусадку?
---------------------------------------------------------
Про апгрейды уже все забыли 
|
|
|
|
|
|
БЛОГГЕР
101 сообщений
Мужчина
|
можно попробовать вот такую схему 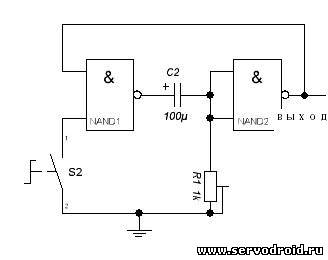 нужно две для правого и левого датчика. нужно две для правого и левого датчика.
ждущий мультивибратор на логике 2и-не
при кратковременном замыкание S2 на выходе возникает логическая единица. в зависимости от емкости конденцатора и сопротивления R1 единица держится определенное время.
если одну часть настроить на более продолжительную задержку чем другую, то при попадание в угол робот будет отъезжать в определенную сторону а не тыкаться в него))))))))))
5017229.jpg
(8.4 Kb)
|
|
|
|
|
|
БЛОГГЕР
340 сообщений
Мужчина
|
Elektro, на счёт отъезжать, рассматриваем случай когда робот с достаточно длинной базой и задним приводом утыкается в угол.
Мне бы какое нибудь решение что бы он задний ход на L293D включил. Я думаю что придётся задействовать все входы/выходы (их жетам по 4е штуки каждых). Кто нибудь сталкивался с таким?
Если несу чушь или охинею поправте пожалуйста
|
|
|
|
|
|
Начальная группа
1798 сообщений
Мужчина
|
Всё правильно вы несёте
ENA1 и ENA2 - отвечают за вкл/откл. моста.
Input 1 и Input 2 за направление вращения двигателя.
Если включить двигатель между OUT1 и OUT2, то если подать на вход #1 логич. 1, а на выход 2 логич. 0, дыигатель в одну сторону закрутится, иначе в другую.
В даташите посмотрите таблицу истинности, там правда по буржуйски написано.
|
|
|
|
|
|