Натянутая лента на роликах образует плоскость, эта плоскость должна быть параллельна полу, иначе площадь контакта с поверхностью пола будет вырождаться в линию при разного рода перекосах.
Передний ролик (А) пусть будет закреплен жестко и всегда являться второй точкой опоры для робота (первая - ведущие колеса), а "задний" ролик (В) может иметь возможность смещаться вверх-вниз, например концы его оси вращения вставлены в вертикальные пазы... Возвращаться в низ под своим весом или быть подпружиненым, это кстати даст ему возможность вставать под углом, следуя рельефу )) 
Ролики, нужны валики, пластмасса, желательно с отверстием в по осевой, чтоб не заморачиваться с центровкой оси... Желательно чтоб был выбор из разных диаметров...
Самое простое - серые пластмассовые водопроводные трубы, к сожалению в них нет оси, придется делать заглушки с торцев, вклеивать и свелить в центре, чтоб пропустить ось, зато ассортимент диаметров!
Добавлено (19.12.2010, 14:05)
---------------------------------------------
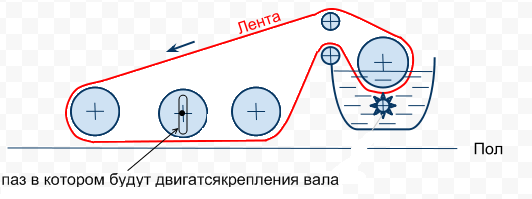
Немного мутируем...
Стало на один ролик меньше, ближе валики А и В ))

"Ведущим" - т.е. протягивающим ленту валиком, скорее всего будет С, т.к. у него больше длина окружности и соотв. площадь касания ленты, его можно обклеить чем то шероховатым, но не размокающим, наждачка скорее всего раскиснет, хотя вроде есть водостойкая, но боюсь на очень долго ее не хватит...
При направлении ленты, как показано на рисунке, лента будет помогать нам "ехать" в перед (в лево на картинке), т.к. я планирую что лента будет двигаться быстрее робота, т.е. проскальзывая и протирая пол, этот вариант хорош, меньше будем буксовать, возможно даже придется тормозить  основными колесами.
основными колесами.
Но есть проблема с натяжением, возможно провисание показанное пунктиром, а так же лента боюсь будет приподнимать ролик В, и в результате лента не будет касаться всей рабочей поверхностью пола.
Если же ленту направить наоборот, она будет стараться откатывать робота назад, и придется хорошенько упереться чтоб ехать вперед. Боюсь что будут проблемы с калесами, может их тоже обклеить чем то резиновым, мягким, чтоб хорошо сцеплялись с линолиумом, ламинатом... Хотя если песок, грязь, есть риск буксовать...
С натяжением тут проблем меньше, и ролик В будет на месте.
Классным вариантом будет сделать две ленты, отдельные, направленные друг на встречу другу, соотв. как бы иметь два одинаковых блока, но это значительно сложнее в реализации в домашних условиях 
Можно "вывесить" передний ролик, вроде должно быть лучше:

Нашел в ближайшем сельпо водопроводную пластиковую трубу в 40 мм и пластиковый контейнер высотой около 50 мм, прямоугольный, если его перевернуть вверх дном, в нем можно разместить два ролика А и В. Вырежу одну из стенок и часть дна, в общем пазы входа-выхода ленты...
Хочу везде маленькие шариковые подшипники, вроде и купить у нас можно... и как их надежно крепить, нужны втулки, посадка с натягом, это все в домашних условиях сложно помоему...