22:26 ШАССИ ДЛЯ РОБОТА МИНИ-СУМО ЧАСТЬ1 | ||
 ШАССИ ДЛЯ РОБОТА МИНИ-СУМО. Начинаем публиковать статью по изготовлению робота мини-сумо. Статья состоит из нескольких частей, в каждой из которых приводиться подробная инструкция по сборке. В этой части приводиться описание по сборке шасси робота.
В интернете очень много информации, в которой есть описания тех или иных роботов. Эти статьи включают фотографии собранного робота, видеосъёмку его в движении, а также программный код. Но, как правило, мы видим уже готовые экземпляры, а сам процесс создания «от идеи-до модели», остается за кадром. Порой именно такого подробного изложения не хватает и затрудняет повторение конструкций приводимых в журналах или на сайтах. Хочу вам предложить материал по самостоятельной разработке шасси робота для соревнований мини-сумо. Информация будет очень полезна всем начинающим разработчикам, а также школьникам или студентам. Возможно, и опытные конструкторы смогут найти для себя интересные идеи, тем более что данный робот был изготовлен из доступных и подручных материалов, а купленные детали достаточно не дорогие. |

$CUT$
***
1.ПРАВИЛА СОРЕВНОВАНИЙ.
Для начала нам необходимо ознакомится с правилами соревнований по мини-сумо. Они здесь. Теперь мы знаем, что размеры нашего будущего робота, и его выступающих частей на момент старта, не должны превышать 10х10 см.
2.ПОДГОТОВКА ДЕТАЛЕЙ.
На данном этапе необходимо определится с элементарной базой, это то из каких деталей будет состоять наш робот: двигатели, колеса, плата микроконтроллера, датчики линии и т.д.
3.ДВИГАТЕЛИ И КОЛЁСА.
Двигатели выбираем с редуктором, и небольшим передаточным числом. Китайский магазин нам в помощь. Наш робот должен быть в меру быстрым, чтобы не вылететь на скорости с ринга, и достаточно сильным, чтобы вытолкнуть соперника. В качестве колес я взял ролики от слистывающего механизма денежно-счетной машинки. У них оказался подходящий диаметр, и хорошее резиновое покрытие, которое обеспечит необходимое сцепление с поверхностью ринга. Как вы понимаете, колеса могут быть абсолютно любые и из любого материала.

Рис.1.
4.ДАТЧИКИ КРАЯ РИНГА.
Для того чтобы наш робот не уехал за границу ринга, нам необходимо оснастить его специальными датчиками (Рис.2) которые не дадут роботу пересечь ее. Принцип работы таких датчиков подробно описан здесь. Но если говорить кратко, их принцип основан на светоотражающих способностях поверхностей. Темная поверхность отражает меньше света, чем светлая. В качестве излучателя света используют инфракрасный светодиод, а в качестве приемника фототранзистор чувствительный к инфракрасному излучению. Ну а черное это или белое, разберется микроконтроллер, но об этом позже.
Изображенные на Рис.2 датчики, трофейные, и взяты из узла контроля бумаги чекового принтера кассового аппарата. Гибкие провода заменены на контакты, для удобства подключения. Могут использоваться и другие датчики, такие как на Рис. 3.
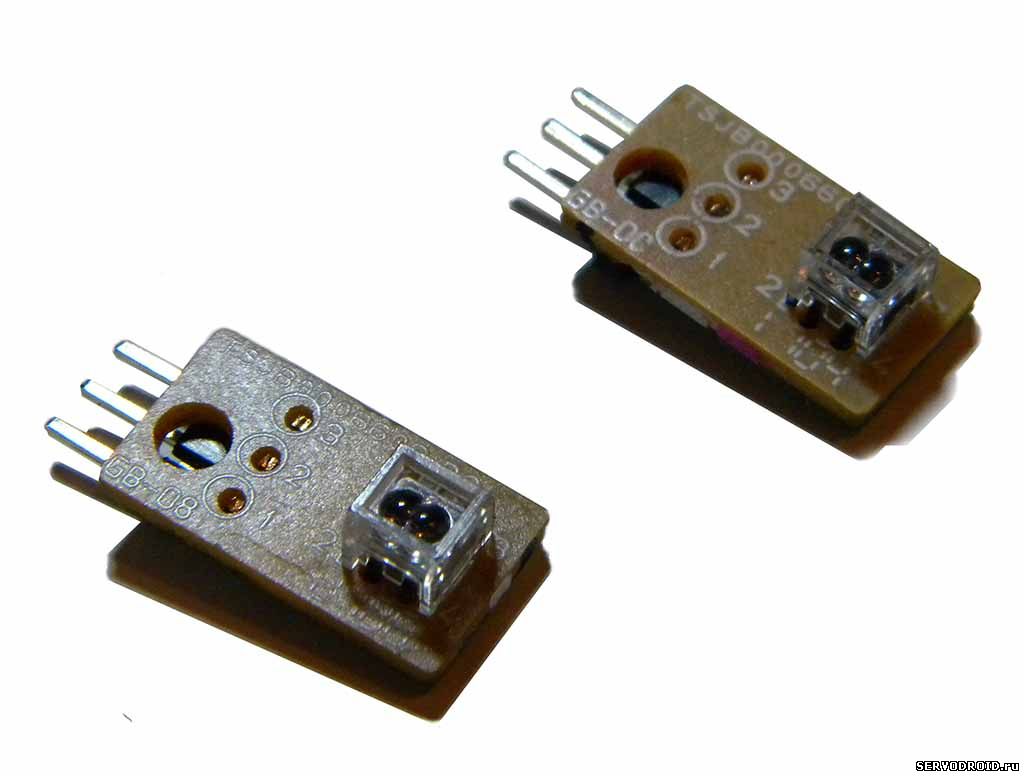
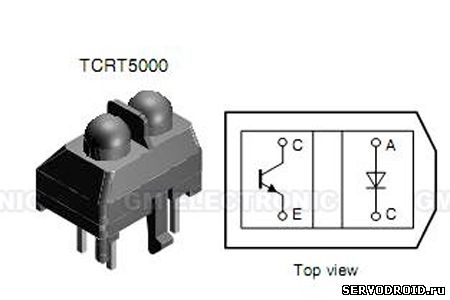
Рис.2 Рис.3.Датчик TCRT5000
Датчик довольно дешевый и очень распространен в интернет-магазинах радиодеталей. Можно сделать свои датчики из отдельных светодиодов и фототранзисторов, только обязательно нужно организовать между ними перегородку, как на рисунке, дабы предотвратить боковое засвечивание транзистора и его ложное срабатывание.
5.ДАТЧИКИ ПРЕПЯТСТВИЯ.
Для обнаружения противника нам нужен датчик, способный обнаружить перед собой препятствие. В робототехнике очень распространены два типа датчиков ультразвуковые и инфракрасные. Самые дешевые датчики – это ультразвуковые. Мы будем использовать именно такой датчик. По габаритам он конечно больше чем инфракрасный, но зато идеально подходит для поставленной задачи, прост в подключении, монтаже и программировании.

Рис. 4 Ultrasonic HC-SR04
Принцип работы такого датчика заключается в отражении ультразвуковой волны от препятствия. У летучих мышей и дельфинов аналогичные сонары. Один глазок нашего датчика излучает ультразвуковую волну, звук долетает до препятствия, отражается от него и этот сигнал принимает второй глазок датчика. Зная время, за которое сигнал вернется назад, несложно вычислить расстояние до препятствия. Не переживайте, нам вычислять ничего не нужно, на плате датчика уже есть микроконтроллер который занимается этими вычислениями. На выходе мы получим чистое значение в сантиметрах или других заданных величинах.
6.ДРАЙВЕР ДВИГАТЕЛЯ.
Любой электрический двигатель является отменным потребителем тока, и напрямую его конечно нельзя подключать к выводам микроконтроллера, микросхема может выйти из строя. Большую нагрузку подключают через мощные транзисторы. Мы бы тоже могли подключить двигатели таким способом, но транзистор может обеспечить прохождение тока только в одном направлении. Для робота, следующего по линии - это идеальный вариант, так как он движется только вперед, но в нашем случае робот мини-сумо должен двигаться и вперед и назад. Одним транзистором тут не обойтись, их понадобится по 4 штуки на каждый двигатель! Поэтому мы не будем искать себе проблем и дополнительных затрат и возьмем готовый драйвер для двух двигателей.
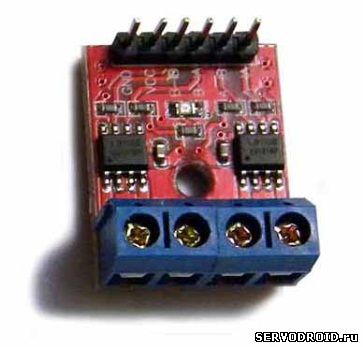
Рис.5.
Этот недорогой драйвер рассчитан на ток двигателя 600Ма, в нашем случае этого будет достаточно. Каждая микросхема может крутить двигатель как в одну, так и в другую сторону. Управляется драйвер обычными логическими сигналами и подключается драйвер напрямую к контроллеру. К достоинствами драйвера еще можно отнести возможность использования отдельного источника питания двигателей. Это позволит избежать помех от работающих моторов, а так же использование моторов с питанием больше питания схемы. Ну и управление сигналом ШИМ – это позволит регулировать скорость вращения.
7.ИЗГОТОВЛЕНИЕ ШАССИ.
Настало время для творческой работы. Чтобы создать легкий и прочный корпус нам понадобится ПВХ пластик. Что это такое, и где его взять? ПВХ пластик это легкий, достаточно прочный и хорошо обрабатываемый материал белого цвета. Он широко применяется у рекламщиков, они используют его как основу для наклейки пленки Oracle с отпечатанным изображением. А обрезки у них есть всегда! Просто просим чуть-чуть.

Рис.6.
Нам еще понадобится канцелярский нож, двусторонний скотч, супер клей, тонкий картон, наждачная бумага и железная линейка. Пластик ПВХ отлично режется ножом и прочно склеивается супер клеем. Швы и неровности легко обрабатываются наждачной бумагой. Для чертежей мы будем использовать обычный лист из школьной тетради в клетку. Первое что мы сделаем – это разметим основу робота и постараемся разместить все наши элементы на прямоугольнике со сторонами 9,5х9,5 см. Вы спросите, почему у нас сторона не 10см как в правилах? Поверьте, лучше сделать чуть меньше указанных размеров, так как если размеры будут чуть больше, то наш робот просто не пройдет квалификационный отбор. Ну, если очень хочется, то можно и по размерам 10х10см.
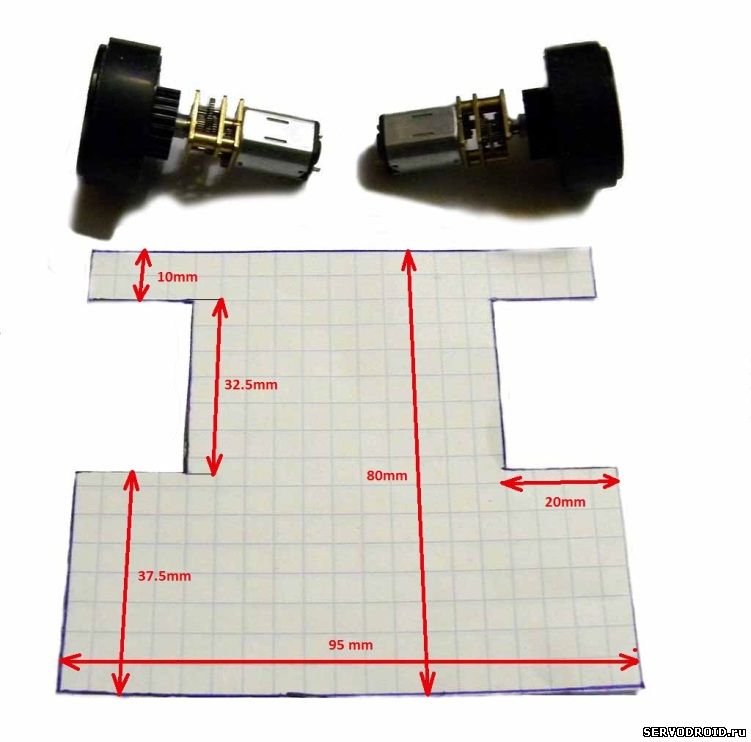
Рис.7.
У нас получилась заготовка размером 9,5х8 см. Это будет у нас рама или днище. Недостающие 1,5 сантиметра с одной стороны мы используем для размещения датчиков края ринга. Колеса мы размещаем так, чтобы они были вровень с боковыми частями корпуса и не выступали наружу. Чем меньше выступающих частей, тем сложнее противнику будет за что либо зацепиться.
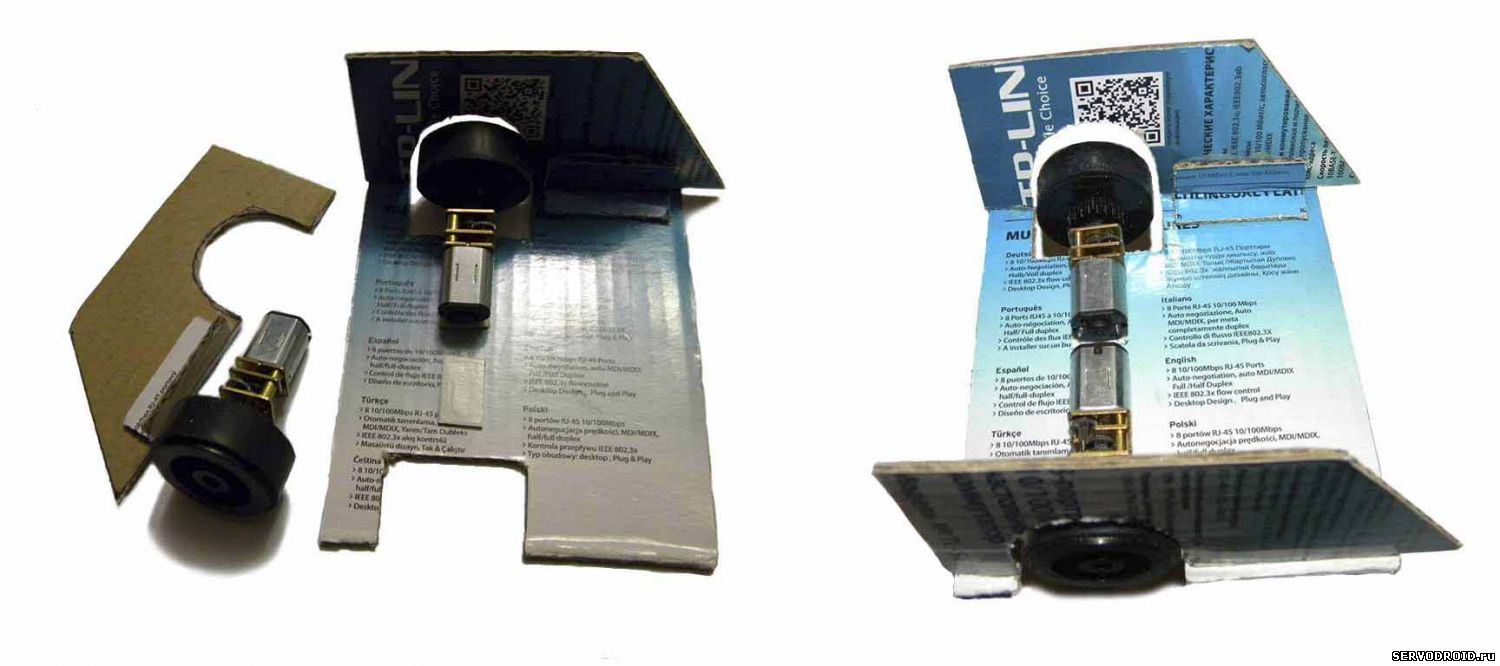
Рис.8.
По нашему шаблону вырезаем выкройки из картона. Закрепляем двигатели при помощи двусторонней липкой ленты и проектируем боковые стенки. Я решил сделать корпус робота в виде «зубила», уже можно назвать это классикой у роботов мини-сумо. Но вы можете выбрать совершенно любой дизайн. Можно экспериментировать сколько угодно, картона хватит на все эксперименты.
Ну вот, наш картонный макет готов и все детали подогнаны. Можно приступать к изготовлению их из пластика.
ВАЖНО! Канцелярский нож очень острый! Будьте предельно аккуратны. Ручка ножа должна быть удобной и плотно сидеть в руке. Не стоит оставлять детей без присмотра во время работы острыми и опасными инструментами!
Не забывайте, что у пластика есть своя толщина и ее обязательно нужно учитывать при моделировании, чтобы не выйти за планируемые размеры. Толщина моего пластика составляет 3 мм, и если я приклею боковые стенки как показано на Рис. 9, то ширина моего робота составит чуть больше 10 см.
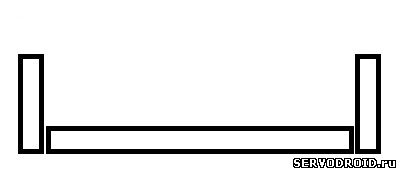
Рис.9.
Если клеить боковые стенки сверху, Рис. 10, то мы получим некрасивый шов на всю длину. Конечно, его можно зашкурить, но если вы уже вырезали колесные арки, мы столкнемся с еще одной проблемой – арка будет выглядеть овальной, что так же выглядит плохо.

Рис.10.
На Рис. 11 показано как мы поступим. От основания отрезается полоска шириной равной толщине листа пластика.
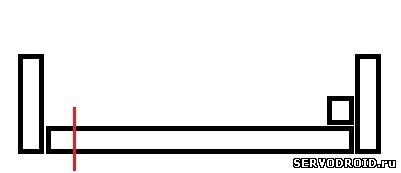
Рис.11.
Эта же полоска пойдет в дело, как усилитель шва. Рис. 12.
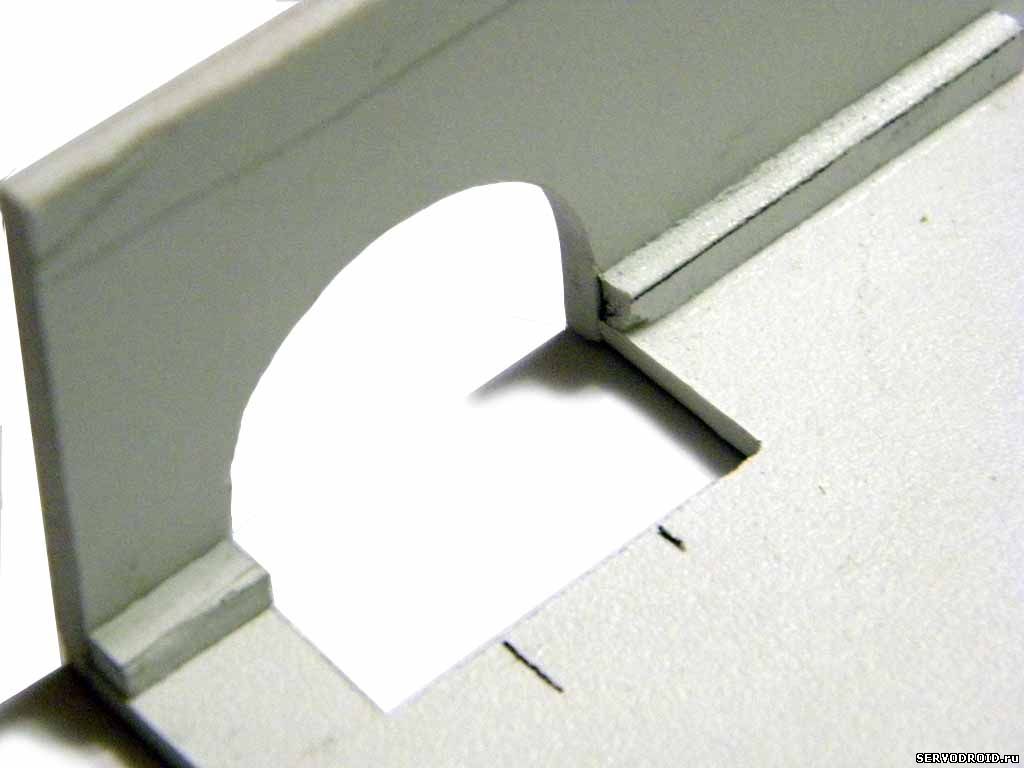
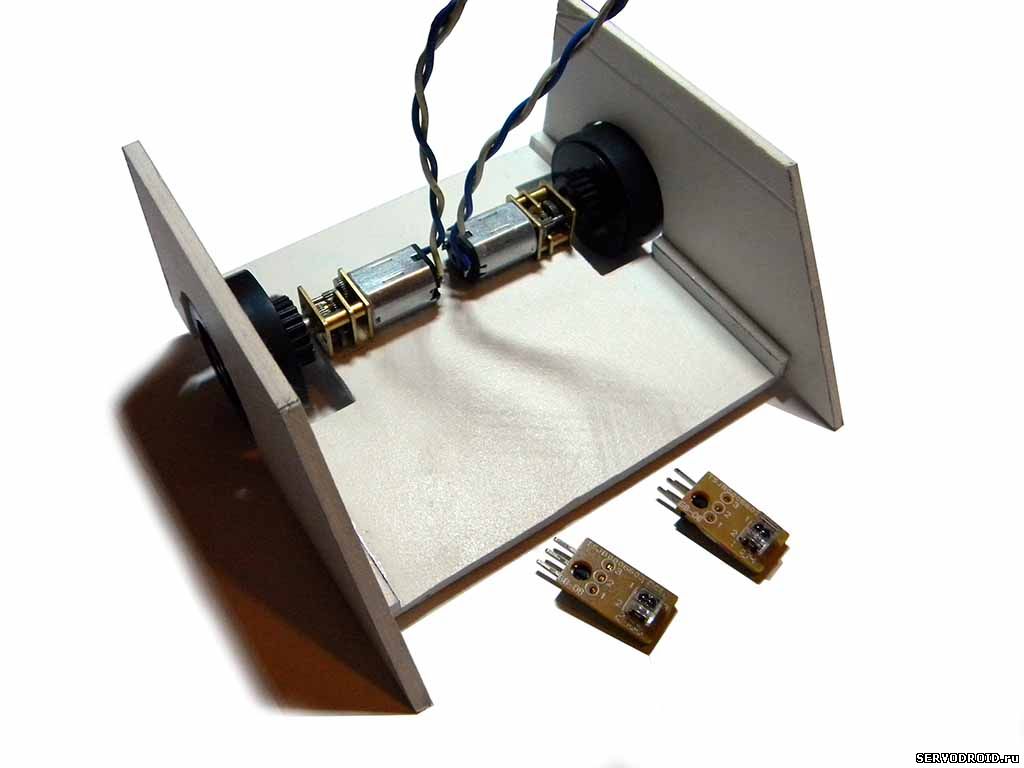
Рис.12. Рис.13.
После того как клей окончательно высохнет, обрабатываем шов наждачной бумагой. Кстати супер клей или гель, может выступать в качестве шпаклевки. Достаточно еще раз промазать шов снаружи и дать ему высохнуть, затем зашкурить. После покраски шов видно не будет.
Размечаем место под двигатели и приклеиваем их. Предварительно к двигателям припаиваем провода, потом это будет сделать не просто. Рис. 13
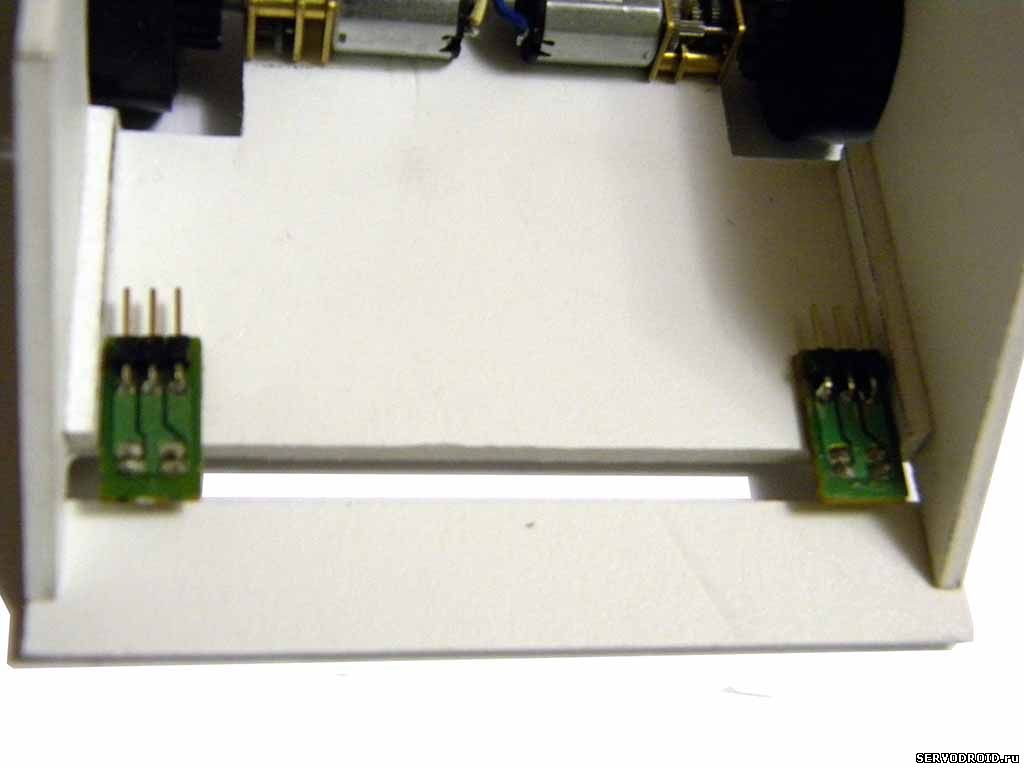
Рис.14.
Теперь закрепляем датчики края ринга как показано на Рис. 14. Снизу мы приклеиваем опорную планку, она будет служить третьей точкой опоры, и будет скользить по поверхности ринга. Максимальный контакт с поверхностью даст нам преимущество как можно ниже подлезть под противника.
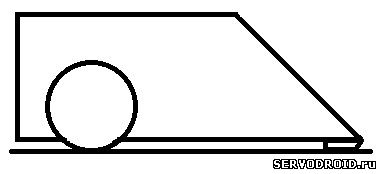
Рис.15.
В центре есть еще много места для установки дополнительных датчиков, скажем, еще трех. В перспективе, после этого можно будет смело запускать робота следовать по линии.

Рис.16.
Продолжаем макетировать. На этот раз делаем «таран» с местом для датчика расстояния. Обратите внимание, на Рис. 16 двигатели уже закрыты пластиком. Это предотвратит случайные замыкания на поверхности двигателей и защитит редукторы от пыли. Но и дополнительная фиксация самих двигателей не помешает. Желательно капнуть на редукторы по капле смазки до момента их полного закрытия пластиком.
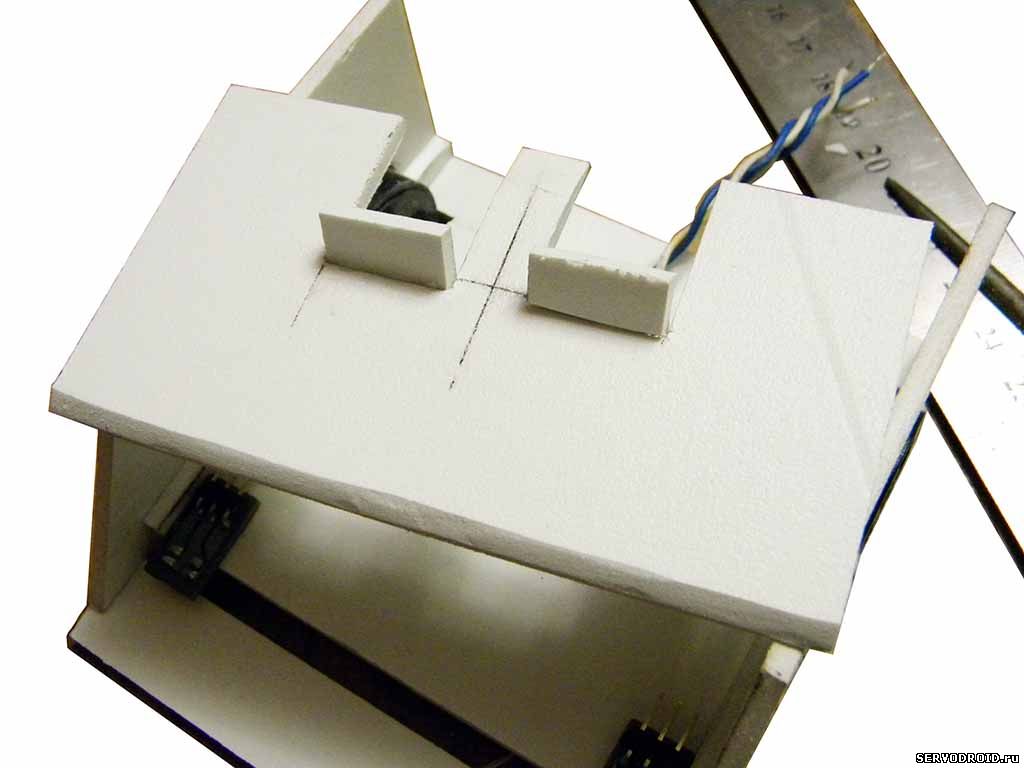
Рис.17.
После окончательной подгонки размеров, вырезаем пластину «тарана» из пластика. Формируем подставочки для датчика расстояния и приклеиваем на место.
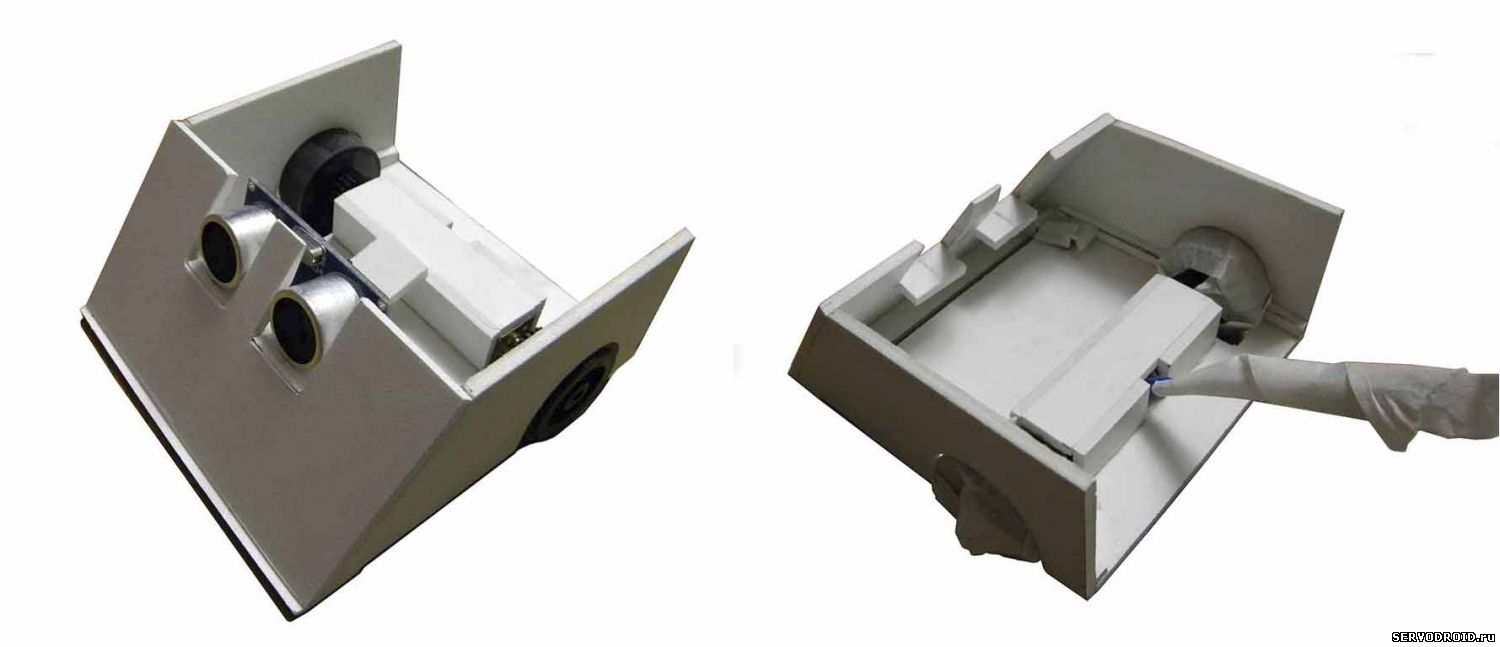
Рис.18.
Вот так у нас выглядит законченный вариант корпуса для робота мини сумо. Осталось подготовить его к покраске, замотав колеса, датчики и провода малярной лентой. Пластик очень хорошо красится. Для покраски возьмем баллончик с черной матовой краской.
Продолжение во второй части.
Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим!
автор Андрей Андросов www.servodroid.ru
© Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований.
Мы очень рады,
что наши статьи помогут тебе - начинающему робототехнику, освоить эту интереснейшую сферу и прокачать свой скилл в этом направлении. Также хотим отметить, что по данным статьям мы - разработчики сайта SERVODROID проводим занятия в бесплатных кружках робототехники, и нам очень нравится учить и рассказывать что такое BEAM-робототехника всем желающих.
Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;)
Начни общаться на нашем Форуме или Онлайн-чате
[ Стать участником сайта / Авторизоваться ]
| Всего комментариев: 2 | |
|
| |

