10:39 Модуль датчика линии на основе компаратора LM311 | ||
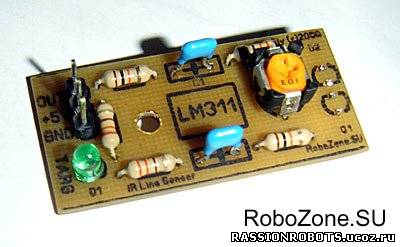
 Представляем описание, схему и разводку печатной платы для изготовления простого модуля датчика линии на основе аналогового компаратора LM311 и инфракрасной оптической пары. Схема очень проста и может быть легко повторена начинающими робостроителями. Правильно собранная схема в настройке не нуждается.
Данный модуль можно применить для самых разнообразных целей:
Таким образом, видно, что данный модуль достаточно универсален.
Принцип работы прост и понятен. Компаратор сравнивает опорное напряжение и напряжение с коллектора фототранзистора. При совпадении напряжений (либо превышении эталонного) на выходе компаратора меняется логический сигнал на противоположный.  Модуль имеет возможность регулирования порога срабатывания. Для этого в схему включен построечный резистор, с помощью которого возможна регулировка опорного напряжения на компараторе.
Так же в схеме присутствует сигнальный светодиод, который отражает текущее состояние выхода компаратора:
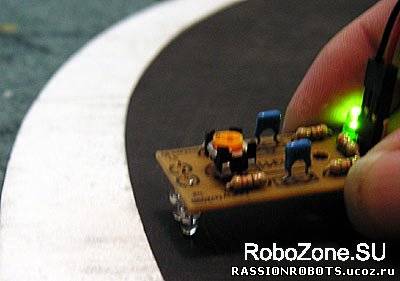  Диапазон дальности определения препятствия (линии) достаточно широк от 1мм до 15 и больше сантиметров (максимум точно не устанавливался).
Так как в наличии не было LM311 в корпусе DIP, мы использовали SMD исполнение компаратора (шаг дорожек достаточно большой и распаять его будет не трудно), что отразилось на разводке платы. Переразвести плату под DIP при желании не составит особого труда.
Микросхема, инфракрасный светодиод и фототранзистор расположены со стороны токопроводящих дорожек, все остальные элементы на лицевой части платы. 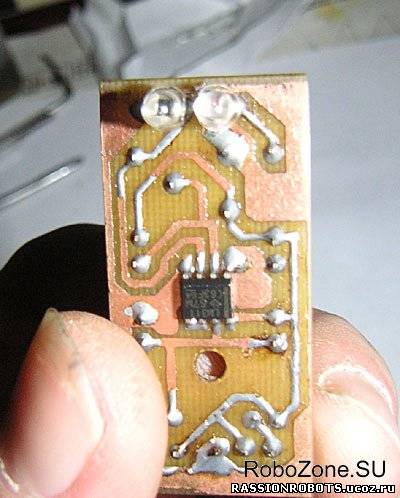 Для проверки работоспособности модуля достаточно подключить питание и отрегулировать порог срабатывания компаратора построечным резистором.
Схема в формате sPlan 6.0 и разводка платы в формате Sprint Layout 4.0 под ЛУТ вы можете скачать ниже.
Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований. Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;) | ||
|
| ||
| Всего комментариев: 10 | |
|
| |






