11:07 Модуль управления электродвигателями на основе L298N | ||
 Микросхема L298N давно пользуется большой популярностью у зарубежных любителей робостроения, так как при небольших габаритах и простом управлении позволяет управлять двумя электродвигателями постоянного тока с максимальной нагрузкой до 2А на каждый канал (при параллельном включении каналов – одним двигателем с максимальной нагрузкой до 4А). В нашей стране до недавнего времени было довольно проблематично приобрести данную микросхему. Сейчас подобной проблемы нет, и L298N становится актуальным решением для любительской робототехники.
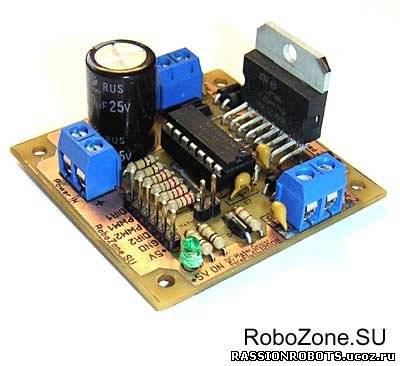
Управление L298N полностью аналогично L293x, по сути данный модуль схемотехнически мало отличается от ранее опубликованного модуля управления двигателями на основе L293x. Текущая схема отличается отсутствием дополнительного стабилизатора, так как линейные стабилизаторы серии L78xx (LM2940) не рассчитаны на нагрузку более 1-1,5А и поэтому питание двигателей подается отдельно от основной линии питания (на схеме предусмотрена подача питания от основной линии – перемычка, но ее использование рекомендуется только при общем потреблении двигателей не более 1А либо в целях отладки) Так же в схеме, на линию питания двигателей, добавлен электролитический конденсатор большой емкости. Он предназначен для устранения провалов напряжения при управлении двигателями.
 Как говорилось ранее, управление двигателями на основе L298N очень простое - направление вращения электродвигателей задается изменением логических уровней на входах каждого из каналов, что требует для управления двумя двигателями четырех выводов порта микроконтроллера и дополнительно еще двух для подачи ШИМ на каждый канал ENABLE (если вы не используете ШИМ, то достаточно подать на данные выводы питание либо высокий лог. уровень с МК ) Мы решили немного изменить схему управления. В представленной схеме полное управление двигателями осуществляется вместо шести выводов контроллера – четырьмя. Это стало возможно при использовании микросхемы стандартной логики 74HC00. В нашей схеме изменение направления вращения каждого из двигателей осуществляется путем изменения логических уровней на DIR1 и DIR2. По умолчанию на этих входах установлен низкий лог. уровень. Достаточно изменить его на высокий лог. уровень и двигатели будут крутиться в другую сторону. ШИМ подается соответственно на PWM1 и PWM2
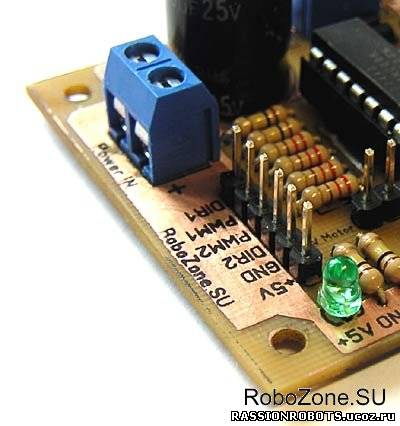 Печатная плата модуля выполнена в двухстороннем варианте, но особой сложности при повторении это не вызовет. Токопроводящие дорожки широкие (минимально 0,6мм) и при изготовлении платы достаточно будет уделить внимание сведению сторон. Переходы между слоями осуществляются с помощью кусочков проводника, запаянных с обоих сторон. Двухсторонний вариант обеспечил неплохую компактность модуля, что особенно важно для небольших роботов.
 Как и L293x, L298N обладает теми же недостатками – повышенное тепловыделение и энергопотребление. В связи с этим, при использовании модуля на предельных нагрузках на корпус L298N необходимо установить радиатор. Его установка не вызовет особых проблем, так как L298N выполнена в корпусе типа MULTIWATT, который имеет специальное отверстие для крепления радиатора.
Данный модуль был протестирован в различных режимах и показал стабильную работу. Схема в формате sPlan 6.0 и разводка платы в формате Sprint Layout 4.0 под ЛУТ вы можете скачать ниже.
Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований. Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;) | ||
|
| ||
| Всего комментариев: 6 | |
|
| |
