
РЕГЛАМЕНТ СОРЕВНОВАНИЙ «ДИСТАНЦИОННЫЕ OFFLINE СОРЕВНОВАНИЯ ПО BEAM-РОБОТОТЕХНИКЕ»
Добро пожаловать на дистанционные offline соревнования по BEAM-робототехнике! [ВЕРСИЯ ОТ 8.05.2020]
|
Участник: Чекавая Виолетта Андреевна, ученица кружка робототехники ПФМЛ 239, Педагог: Хартанен Александр Вячеславович Победитель соревнования! - I место |
Участник: Есиков Сергей Дмитриевич, ученик кружка робототехники ПФМЛ 239, Педагог: Хартанен Александр Вячеславович Победитель соревнования! - II место |
Поздравляем победителей соревнования! Участники, занявшие призовые места награждаются специальным набором для сборки и программирования робота на основе плат Arduino. Дипломы победителей и призы будут доставлены вам индивидуально, по согласованию с родителями. Просим связаться с организатором по почте melnik1412@yandex.ru и уточнить адрес доставки. Также все участники соревнований награждаются сертификатами участника. Скачать сертификаты участника можно ниже.
Участники соревнования:
1. Доценко Максим, 2. Чекавая Виолетта, 3. Демин Анатолий, 4. Есиков Сергей, 5. Мухин Иван, 6. Архипов Никита, 7. Круглов Валентин, 8. Успаленко Кирилл, 9. Тонких Иван, 10. Ходыкин Тимофей.
Предоставленное оборудование:
Уважаемые учащиеся, предоставленное вам оборудование необходимо вернуть в целости и сохранности обратно в лицей 239 в начале учебного года, в сентябре. А до этого вы можете использовать это оборудование для сборки и пайки своих проектов. Удачи и ждем ваших побед в новом учебном году!
|
СОДЕРЖАНИЕ |
|
|
|
Категории соревнований |
………………………………………………………………………………………………….. |
2 |
|
Требование к участнику соревнований |
………………………………………………………………………………………………….. |
2 |
|
Правила съёмки видеороликов |
………………………………………………………………………………………………….. |
3 |
|
Характеристики трассы |
………………………………………………………………………………………………….. |
3 |
|
Конструкция робота |
………………………………………………………………………………………………….. |
4 |
|
Порядок проведения соревнований |
………………………………………………………………………………………………….. |
5 |
|
Порядок отбора победителя |
………………………………………………………………………………………………….. |
6 |
1. Категории соревнований
Участникам предстоит побороться за I , II и III места.
- Соревнование «Следование по линии» будет проводиться в одной возрастной категории (общей).
- Данное соревнование проводится для учеников кружков робототехники в направлении «Радио-электронные системы управления (BEAM-роботы) Центра робототехники Президентского физико-математического лицея №239, г. Санкт-Петербург.
- Тип соревнования: с использованием технологий дистанционного обучения.
- В случае необходимости организаторы оставляют за собой право утвердить дополнительную категорию для соревнований «Следование по линии».
- Правила проведения соревнований в дополнительной категории наследуют пункты основных правил проведения соревнований.
2. Требования к участнику соревнований
Все желающие принять участие в соревнованиях должны выполнить не сложные условия, обеспечивающие правильное проведение мероприятия.
Для подготовки к соревнованиям участник должен заполнить анкету. Анкета размещена по адресу robofinist.ru
В анкете необходимо указать данные робота (краткое описание, тип робота, видео прохождения попытки, др).
Участнику необходимо скачать и распечатать трассу, собрать робота, снять видео с приемлемым качеством и заполнить анкету участника.
В соревнованиях принимают участие ученики Центра робототехники Президентского физико-математического лицея № 239.
3. Правила съёмки видеороликов
Видеоролики выполнение участником соревнований позволяют оценить результат и определить победителя. Поэтому отнеситесь внимательно к изложенным далее требованиям.
Используйте камеры с высоким разрешением (желательно), чтобы на видео можно было различать все детали соревнования. Если вы снимаете на телефон – производите съемку в горизонтальной плоскости (широкий формат), чтобы все детали трассы и сам робот полностью попадал в кадр. Съемка должна проводиться при достаточном освещении.
При съемке перед камерой обязательно наличие секундомера.
Перед началом попытки, поднесите камеру к специальной разметке и поднесите к ней линейку в разных местах, чтобы продемонстрировать соответствие распечатанной трассы реальным размерам.
Во время съёмки постарайтесь свести к минимуму тряску камеры. Рекомендуется установить камеру на штатив. Если штатива нет – поставьте стул, или стремянку и просто зафиксируйте вашу камеру на ней, чтобы она не тряслась и запись производилась выше уровня расположения самой трассы.
Пример: как нужно производить съемку вашей попытки.
Заснятое видео необходимо отправить организаторам соревнований.
Участник, выложивший видео в сеть для общего просмотра раньше срока снимается с соревнования.
Все видеоролики сначала обработают и проверят организаторы, после чего они будут загружены в сеть. После загрузки ролика в сеть допускается его распространение.
4.Характеристики трассы
Качественно изготовленная трасса поможет вашему роботу быстро дойти до финиша. Обратите внимание на таблицу 1, где перечислены основные характеристики трассы.
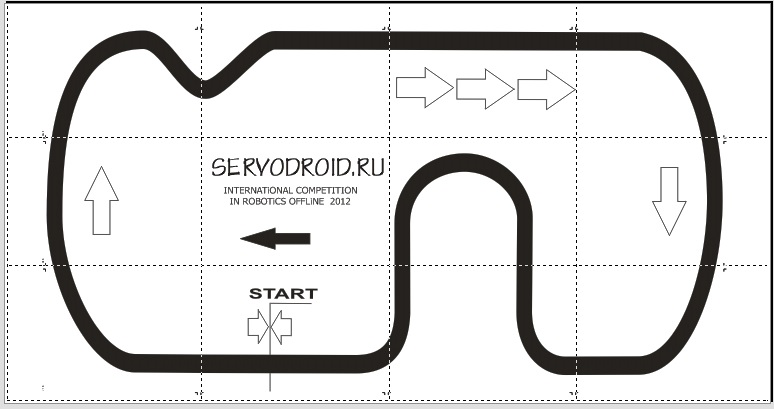
(На фото выше вид полигона трассы, по которому должен следовать робот «БиБОТ 1»)
В таблице 1 приведены характеристики трассы используемой для соревнований “Следование по линии”.
Табл.1.Характеристики элементов трассы.
|
№ |
ХАРАКТЕРИСТИКА |
ПАРАМЕТР |
|
1 |
Цвет полигона |
белый |
|
2 |
Цвет линии |
чёрный |
|
3 |
Ширина линии |
20мм |
|
4 |
Общий размер всего трека |
12 листов формата A4 (3ч4) |
Правилами разрешен отступ по 5 мм от краев трассы. Если будет выявлено, что эти параметры завышены, участник снимается с соревнования.
Для соревнований используется подготовленный макет трассы. Постарайтесь аккуратно и качественно произвести склейку полигона, чтобы ваш робот не застревал в стыках между листами.
Запрещается внесение изменений в геометрические размеры трассы!
Размеры трека должны строго соответствовать заявленным размерам
На одном из листов нанесена метка, в которую необходимо поместить предмет, для визуального подтверждения соответствий трека с заявленными размерами
Организатор оставляет за собой право не допустить участника до заезда в случае определения несоответствий в размерах трассы или меток.
Для распечатки и соблюдения геометрических размеров трассы и о том, как правильно её распечатать ознакомьтесь с инструкцией: Скачать инструкцию.
5.Конструкция робота
Робот, принимающий участие в соревнованиях должен отвечать некоторым требованиям.

(На фото выше робот «БиБОТ 1» в собранном и готовом к соревнованию виде)
В таблице 2 приведены требуемые характеристики робота используемого в соревнованиях “Следование по линии”.
Табл.2.Характеристики робота.
|
№ |
ХАРАКТЕРИСТИКА |
ПАРАМЕТР |
|
1 |
Вес |
Не имеет ограничений. Технология изготовления «PaperBOT» - корпус робота из гафра-картона. Тип робота: «БиБОТ 1» сайта servodroid.ru |
|
2 |
Источник питания |
«Крона» 9В |
|
3 |
Количество фотоэлементов |
2 |
|
4 |
Максимальная ширина и длина |
В соответствии с макетом робота. Допускается выпирание элементов робота на расстояние до 4 см от края макета. |
В конструкции робота допускается использование пластиковых деталей изготовленных самостоятельно или напечатанных на 3D-принтере. Допускается использование подручных средств и материалов для крепления элементов робота.
Робот должен быть изготовлен в соответствии с инструкцией по сборке. Не допускается доработка схемы робота дополнительными радиоэлементами. Допускается изменение расположения датчиков и моторов на роботе.
Робот, участвующий в соревнованиях должен быть полностью автономным.
Робот, участвующий в соревнованиях дисквалифицируется, если он не является автономным.
Запрещено использовать готовые робототехнические наборы, выпущенные известными фирмами: Solarbotics, Parallax, Polulu и другие.
Перейти к инструкции по сборке робота «БиБОТ 1» на сайте servodroid.ru
6. Порядок проведения соревнований
Порядок проведения соревнований определяет необходимые условия для прохождения трассы роботом.
Общее время заезда отсчитывается с момента пересечения роботом линии «Старт» до пересечения линии «Финиш».
Событием, определяющим пересечение линий «Старт» или «Финиш» является достижение или прохождение передним бампером робота этих линий.
Для прохождения трассы предоставляется только одна попытка. Все дальнейшие попытки прохождения трассы не как результат не принимаются.
Если робот сходит с трассы или «блуждает» по ней он дисквалифицируется. Результат прохождения аннулируется.
Робот считается покинувшим трассу, если части робота (шасси) находятся не над линией трассы.
Робот считается «блуждающим», если в процессе прохождения трассы он периодически покидает трассу и возвращается обратно, и выполняет развороты в противоположных направлениях.
Решение о зачёте или не зачёте прохождения трассы «блуждающим» роботом принимается судейством в зависимости от времени нахождения вне трассы.
Если робот сошёл с линии трассы и самостоятельно вернулся в том же месте, то результат прохождения трассы считается зачтённым.
Если робот сошёл с трассы и отсутствует на ней более 5 секунд, то робот дисквалифицируется, результат аннулируется, вне зависимости от величины преодолённого маршрута.
7. Порядок отбора победителя
Выбор победителя должен соответствовать критериям, которые приведены далее.
Окончание приема работ 31.05.2020 до 23:00. Публикация и награждение участников 31.05.2020.
Победителем считается команда, чей робот проходит трассу за наименьшее время.
В случае равных результатов, участники делают перезачет.
На прохождение дистанции каждой команде дается неограниченное количество попыток.
По достижению 31.05.2020 все видеоролики будут загружены в Интернет для публичного просмотра
Награждение участников и призеров будет проводиться индивидуально.