17:09 ЦИФРОВОЙ МОДУЛЬ ДЛЯ LINE-РОБОТА |
 Цифровой модуль удерживает робота при движении по линии трассы. Цифровой модуль монтируется на платформе с моторами. Особенность монтажа модуля состоит в креплении непосредственно под днищем робота. После монтажа модуля ваш робот будет передвигаться по линии нарисованной трассы. Большое количество регулировок цифрового модуля позволяет выполнить точную подстройку электрической схемы и повысить устойчивость робота при движении по трассе. На плате цифрового модуля предусмотрены следующие регулировки: скорости передвижения, чувствительности к отражённому излучению, дифференциальная чувствительность фототранзисторов. В качестве источника питания можно устанавливать как гальванические батарейки так и аккумуляторные батарейки. |
$CUT$
1.ВИДЕОТЕСТЫ РОБОТА
На видео.1 робот "бегущий" по трассе, с установленным цифровым модулем.
2.ХАРАКТЕРИСТИКИ И ФУНКЦИОНАЛЬНОСТЬ.
Элемент памяти на триггере запоминает направление схода и вырабатывает сигнал коррекции для двигателя в направлении противоположном сходу с линии. Нужно иметь ввиду, что элемент памяти работает, только пока трасса находится между фототранзисторами! Затем он выключается.

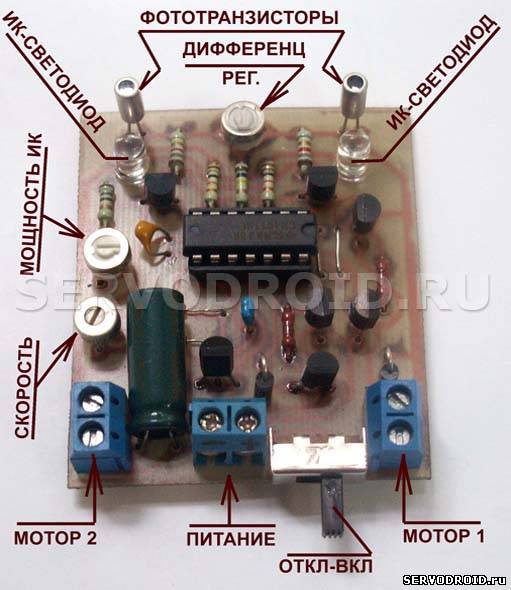 |
КОМПОНЕНТЫ КОНСТРУКЦИИ РОБОТА
Примечание.1. Винтовые клеммники для подключения источника питания и моторов устанавливать необязательно. Но в этом случае их придётся запаивать непосредственно на печатную плату.
Примечание.2. Микровыключатель питания можно установить любого типа подходящего по размерам и работающий контактами на замыкание.
Примечание.3. Фототранзисторы можно заменить на фотодиоды включенные в обратном направлении. В случае замены катод фотодиода нужно подключить к плюсу питания (позиция коллектора(к) фототранзистора), анод фотодиода нужно подключить к позиции эмиттера (э) фототранзистора по рисунку на монтажной плате.
Фото.2. Нажимайте фото для просмотра в полном размере.
|
3.ПРИНЦИП РАБОТЫ.
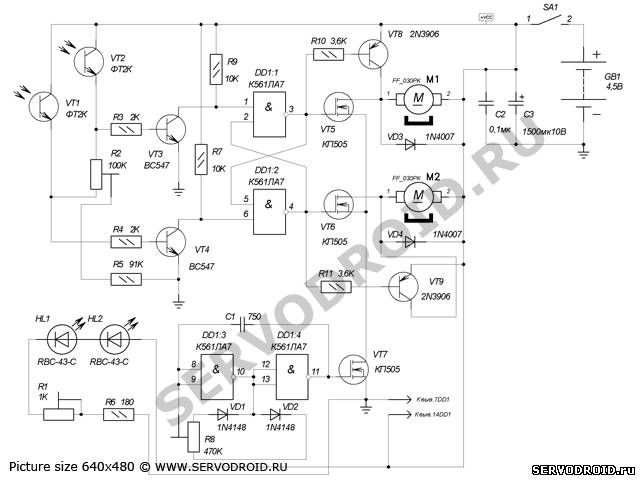
Таблица 1. Список радиокомпонентов.

1.Изготовление печатной платы.
Подготовьте односторонний лист стеклотекстолита толщиной 1-1,5мм и размерами 60x50мм. Предварительно зачистите фольгированную поверхность стеклотекстолита, промойте и высушите. Выполняйте перевод по известной методике ЛУТ, рисунка токоведущих дорожек. Проведите травление в растворе и промывку печатной платы. Далее проведите серление отверстий на позициях установки радиокомпонентов. После изготовления печатной платы выполните лужение токоведущих дорожек.
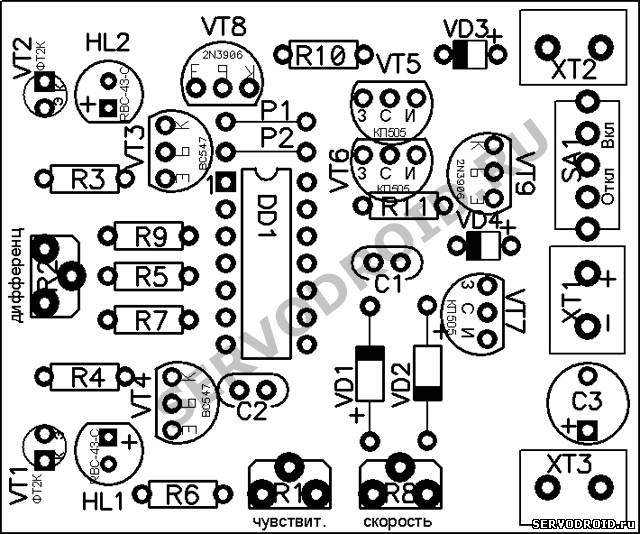
2.Монтаж радиокомпонентов.
На первом этапе выполните монтаж всех радиокомпонентов выполняйте по монтажному чертежу приведённому на рис.2. Порядок монтажа следующий: резисторы, конденсаторы, транзисторы, светодиоды, выключатели питания, моторы. На монтажном чертеже P1,P2 перемычки из тонкого одножильного провода. Для этих целей подходят уже отрезанные выводы от резисторов или неполярных конденсаторов.
Обратите внимание на особенность монтажа конденсатора C3 большой ёмкости. Его нужно припаять так, чтобы потом можно было загнуть выводы, и расположить его в горизонтальной позиции. Светодиоды инфракрасного излучения устанавливайте до основания корпуса затем паяйте. Лучшие результаты можно получить при использовании в конструкции робота импортных светодиодов в корпусе 5мм типа RBC-43-C.
Перед монтажом проверьте с помощью мультиметра сопротивление обоих фототранзисторов, облучая их ярким светом настольной лампы с одинакового расстояния. Возможно, это сопротивление окажется различным и об этом лучше знать заранее. Так как это потребуется при настройке робота. При монтаже фототранзисторы нужно паять с отступом от печатной платы приблизительно 0,5см. Источник питания цифрового модуля – это три батарейки по 1,5 вольта каждая, что в сумме составит 4,5 вольта. Источник питания используется от робота, на котором модуль будет установлен.
3.Подготовка платформы, крепёж моторов и передней опоры.
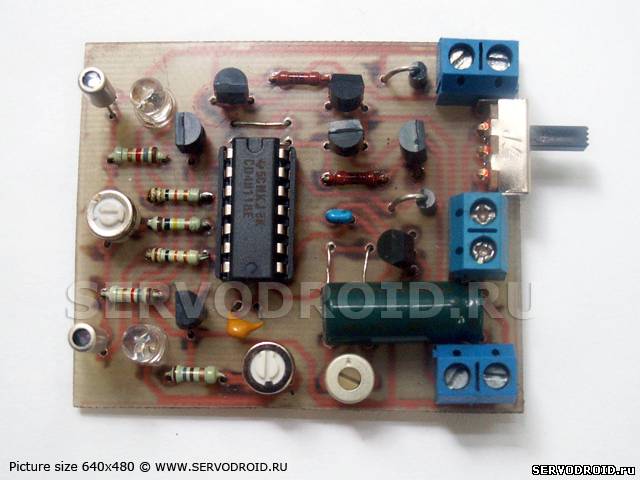
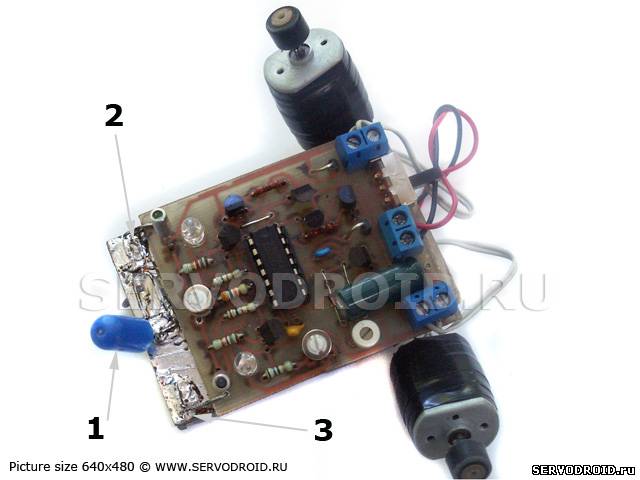
Собранный цифровой модуль показан на фото.3 (вид сверху). Цифровой модуль был установлен на платформу простейшего робота бегущего по линии, из рубрики для начинающих. Вы можете использовать любую основу, например из стеклотекстолита или иного негорючего материала.
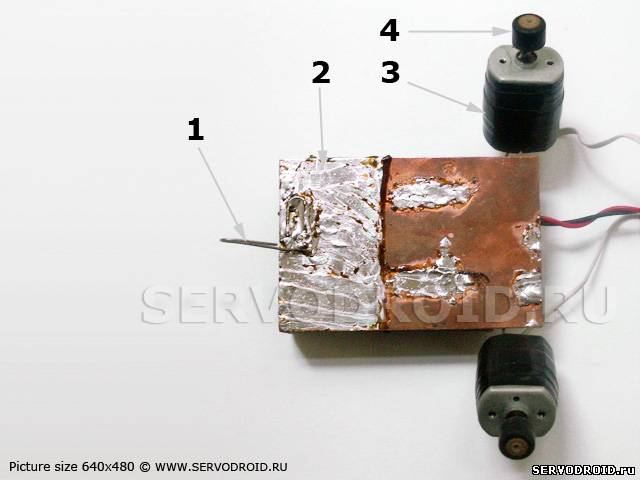
Для соединения пайкой предварительно залудите область стеклотекстолита платформы на которую будет установлен цифровой модуль (фото.4). На фото.4 показано: 1-скрепка-опора, 2-область лужения, 3-изоляционная лента, 4-резиновый ролик диаметром 6-10мм.
В передней части платформы установите (паять) переднюю опору. Переднюю опору можно выгнуть из металлической канцелярской скрепки.
Для крепежа моторов необходимо предварительно разметить их позиции. Затем припаивайте с каждой стороны для каждого мтора по одной металлической канцелярской скрепки. Выгните эти скрепки под углом как крылья. На эти "крылья" в дальнейшем нужно установить и зафиксировать моторы. Моторы прикручивают изоляционной лентой(3) к металлическим крыльям из скрепки. На валы обоих двигателей необходимо надеть резиновые ролики(4) малого диаметра 6-10мм для нормального сцепления с поверхностью (фото.4).
4.Установка футляра.
На верхнюю область (центр) платформы наклейте полоску двустороннего скотча. Установите футляр на липкую поверхность скотча и сильно прижмите (фото.5).

5.Монтаж цифрового модуля на платформу.

В качестве передней опоры на платформу была запаяна металлическая скрепка. Чтобы придать роботу более культурный вид на неё необходимо надеть колпачок. Колпачок можно взять от при разборе корпуса обычной шариковой ручки (фото.7).

Фото.7. Нажимайте фото для увеличения.
Установленный колпачёк-опора(1) показан на фото.8. Закрепите модуль под днищем цифровой модуль как показано на фото.8. Паяйте скрепки к залуженным участкам(2 и 3) поверхности платы робота. Теперь цифровой модуль надёжно закреплён под днищем робота. Вы также можете использовать свои способы крепежа, доступные вам в домашних условиях. Подключите питание к цифровому модулю, от футляра с тремя батарейками, который расположен на роботе. Выполните подключения моторов, а также источника питания с помощью монтажного провода.


После монтажа радиокомпонентов необходимо провести несложную настройку модели робота. Перед настройкой убедитесь в том, установленные в футляре батарейки дают общее напряжение не ниже 4 вольт. А лучше установите "свежие” батарейки так как настройка может потребовать некоторого времени.
-
Установите робота на чистый лист, выверните регулятор скорости передвижения робота на максимум. Включите питание. Если робот не двигается с места, значит, вы установили регулятор скорости в минимальное положение или допустили другие ошибки при сборке. Устраните все замеченные недостатки и повторите процедуру. Если робот едет при этом разворачивается на месте или едет назад, определите, какой из двигателей вращается в противоположную сторону, и перепаяйте подключенные к нему провода, поменяв их местами.
- Когда ваш робот будет ехать прямо (на белом листе) проверьте шим-регулировку скорости. Возьмите маленькую отвёртку и вращайте движок подстроечного резистора R8. Если скорость изменяется от минимальной до максимальной, значит регулировка работает. Если нет, то постарайтесь внимательно осмотреть выводы микросхемы, качество пайки или возможные короткие замыкания припоем. Выставьте скорость передвижения небольшой и выверните регулятор яркости свечения светодиодов R1 ближе к минимальному. При этом регулировку "дифференц” подстроечного резистора R2 нужно установить в среднее положение.
- Установите робота на линию, так, чтобы линия оказалась между фототранзисторами. Если ваша трасса слишком широкая и закрывает оба фототранзистора, осторожно отогните фототранзисторы немного во внешнюю сторону. Проследите, чтобы выводы фототранзисторов не оказались замкнутыми после сгиба. Заметьте, что фототранзисторы должны быть расположены на некотором расстоянии от поверхности листа иначе (если они окажутся прижатыми к поверхности) они не будут реагировать на отражённое излучение. Проведите первый пробный запуск на трассе. Если ваш робот сходит с трассы, определите, в какую сторону это чаще происходит. Затем подрегулируйте подстроечным резистором R2 дифференциальную чувствительность между левым и правым фототранзистором.
- Дифференциальную подстройку можно выполнить иначе. Установите робота правым фототранзистором на чёрную полосу при этом мотор с правой стороны должен выключиться. Если этого не происходит, то вращайте регулировку "дифференц" до тех пор пока мотор не будет чётко выключаться. Тоже проделайте с левым фототранзистором и мотором расположенным с левой стороны. Необходимо добиться такого условия при котором над черной полосой для правого фототранзистора выключался мотор справа, а для левого - мотор слева.
- Если робот не реагирует на чёрную линию трассы, возможно интенсивность ик-излучения слишком велика. Подстройте уровень излучения ближе к минимальному резистором R1. Как визуально определить мощность излучения? Очень просто, если ваш сотовый телефон оборудован фотокамерой. Включите фотокамеру сотового телефона и приблизьте к светодиодам HL1, HL2. Если питание подано на светодиоды, то они будут светиться! Таким образом, вы сможете увидеть невидимое излучение и отрегулировать его интенсивность с помощью подстроечного резистора R1. Немаловажным фактором схода с линии является скорость передвижения. На большой скорости эта вероятность возрастает прямо пропорционально, поэтому для увеличения устойчивости на линии уменьшайте скорость насколько это возможно! Кроме того, движение с меньшей скоростью позволяет экономить источник питания, следовательно, робот будет работать значительно дольше.
Сборка окончена!
***
Если у ВАС возникли вопросы пишите на форуме или в Online чат по робототехнике мы их обсудим!
автор Алексей Высоковольтный www.servodroid.ru © Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
| Всего комментариев: 0 | |