20:18 ДИХОТОМИЧЕСКИЙ LINEBOT | |||||||||||||||||||||||||||||||||||
 Дихотомический LineBoT - это простой робот из серии PaperBot, который способен бежать по нарисованной линии (трассе). Дихотомическим он называется потому, что для обнаружения и движения вдоль трассы использует только два сигнальных состояния от датчика ("0" и "1"). Отсюда способ передвижения заключающийся в постоянном повороте влево-вправо, по зигзагообразной траектории. $CUT$
***
1.ВИДЕОТЕСТЫ. Через панель навигации видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель навигации доступна после запуска видео, справа внизу значок пиктограммы. Перед запуском каждого видеофрагмента автоматически выводится его название в верхнем левом углу. В нижней части окна проигрывателя слева название плейлиста и количество сгруппированных видеофрагментов.
Видеофайлы 1-3 ВСЕ РОБОТЫ на канале SERVODROID!!! подпишись и смотри. Переход по ссылке жми!
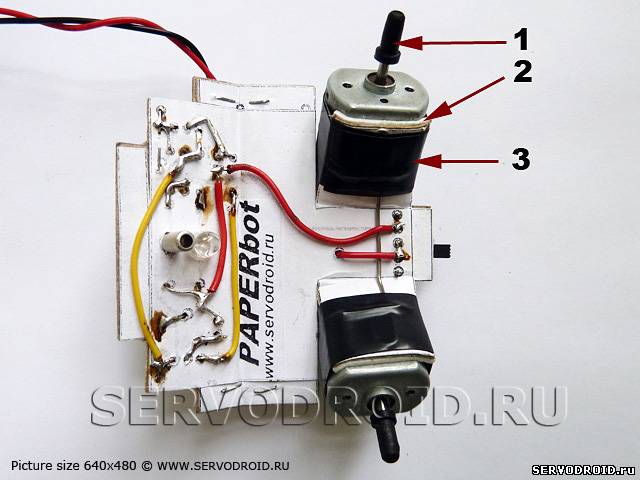
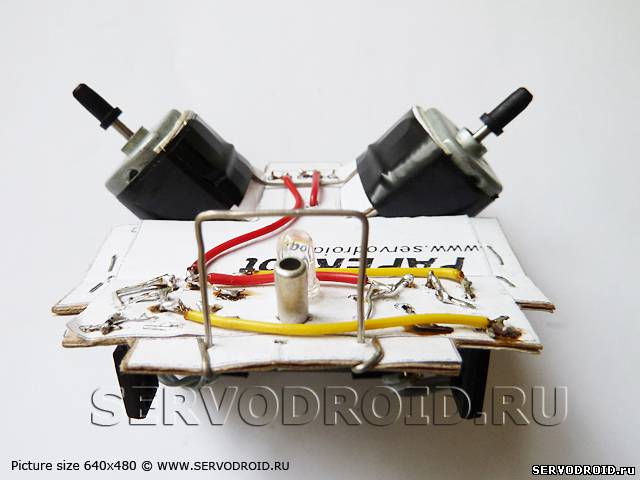
На фото.1 показан дихотомический робот в сборке. Конструктивной особенностью робота является использование бумажной основы (картон) в качестве корпуса для монтажа радиокомпонентов. 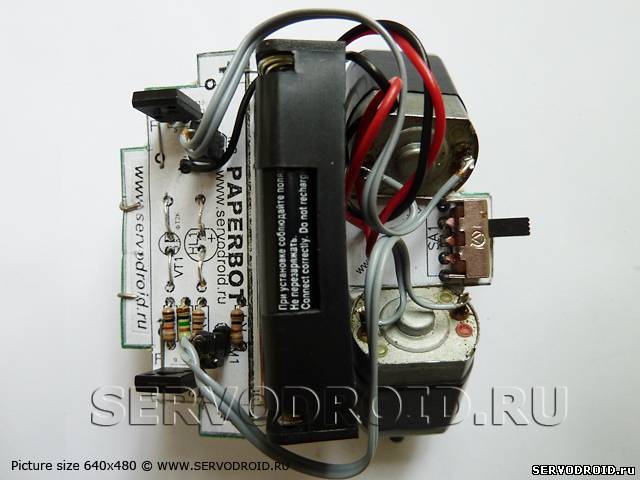 фото.1.нажимайте фото для просмотра в полном размере
Робот рассчитан на движение по трассе шириной 20мм. Её архив с чертежами и инструкцией по сборке размещен в конце статьи. Вы также можете самостоятельно разработать трассу, с учётом того, что ширина линии должна быть не менее 15мм. Для обнаружения трассы на работе установлен один фототранзистор. Алгоритм обнаружения трассы основан на дихотомическом принципе, когда на выходе фототранзистора присутствует два логических уровня: высокий и низкий, которые управляют моторами. Поэтому при движении по трассе робот постоянно пересекает её край определяя разницу между тёмным и светлым участками. Чтобы не усложнять конструкцию и сделать легко повторяемой в домашних условиях, моторы установлены под углом. Такой способ крепления моторов позволяет обойтись без передаточных элементов (шестерёнок и т.д.). Питание конструкции робота осуществляется напряжением 3 вольта от двух батареек типоразмера "AAA". Напряжение в 3 вольта является достаточным для правильной работы всей схемы и уверенного движения по трассе.
3.ПРИНЦИП РАБОТЫ. На рис.1. показана электрическая схема робота. Для контроля (обнаружения) линии на роботе установлен один фототранзистор. Он реагирует на отражённое инфракрасное излучение испускаемое ик-светодиодом HL1. Фототранзистор управляет переключателем на двух биполярных транзисторах один из которых составной. Появление чёрной полосы или белого фона немедленно вызывает изменение тока на эмиттере фототранзистора и как следствие происходит переключение транзисторов. Транзисторы включены противофазно, то есть при включении одного выключается другой и наоборот. Поскольку каждый из транзисторов управляет мотором, то и они включаются поочерёдно. Поэтому при движении вперёд робот всё время поворачивает, то направо, то налево. Теперь разберём все процессы более подробно.
После включения источника питания инфракрасный светодиод HL1 начинает излучать невидимое инфракрасное излучение к которому очень чувствительны фототранзисторы ФТ2К. Допустим робот находится на белом поле, фототранзистор VT1 максимально освещён отражённым излучением и начинает его усиливать. Ток перехода эмиттер-коллектор фототранзистора VT1 достигает больших величин. Фототранзистор VT1 и резистор R1 образуют делитель напряжения в средней точке которого изменяется потенциал в зависимости от освещённости фототранзистора. Когда отражённый свет попадает в окно фототранзистора VT1 на его эмиттере появляется положительный потенциал, который прикладывается через резистор R3 к базе составного транзистора VT2 и открывает его. Так как составной транзистор VT2 обладает большим коэффициентом усиления по току, то на его коллекторе формируется усиленный в несколько тысяч раз входной ток, который поступает на левый по схеме вывод мотора M1. Вал мотора M1 начинает вращаться и робот поворачивает в сторону трассы. Открытый переход эмиттер-коллектор транзистора VT2 шунтирует (закорачивает) через резистор R4 на минус источника питания базовый вывод транзистора VT3. Транзистор VT3 закрыт и мотор M2 не работает. Когда робот заезжает на трассу, её чёрный цвет перестаёт отражать инфракрасное излучение и ток через фототранзистор VT1 скачком уменьшается. Это приводит к падению напряжения на его эмиттере. Поскольку эмиттер фототранзистора VT1 подключен через токоограничительный резистор R3 к базе транзистора VT2, то падение напряжения происходит и на базовом выводе этого транзистора. Транзистор VT2 закрывается и мотор M1 останавливается. НА левом по схеме выводе мотора M1 отрицательный потенциал сменяется положительным. Это происходит потому что, положительный потенциал поступает через индуктивное сопротивление мотора M1 и резистор R4 на базу транзистора VT3. Транзистор VT3 открывается и включается мотор M2 вызывая движение робота от линии в сторону. Когда робот оказывается вновь на белом поле трассы все процессы повторяются снова. Нажимайте фото для просмотра в полном размере.
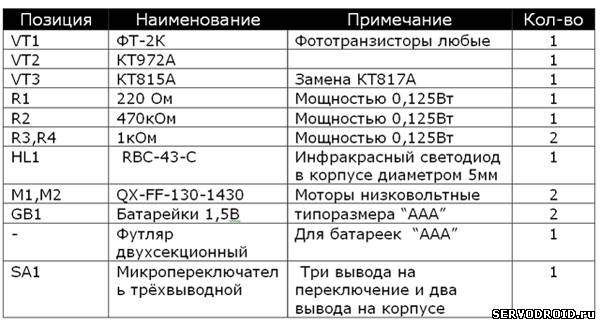
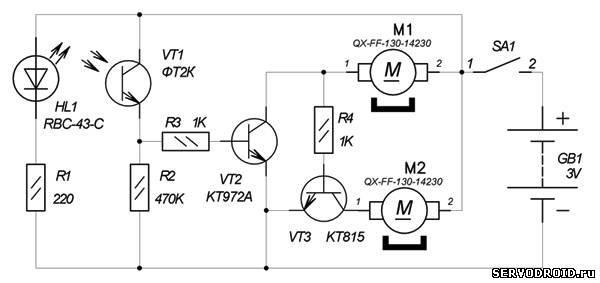 Рис.1.Принципиальная электрическая схема. 4.ДЕТАЛИ И МАТЕРИАЛЫ. В качестве элементов корпуса используется тонкий гофрокартон. Особенность этого материала и его повышенной прочности в двух слоях между которыми находится также картон в гофрированном (гармошкой) состоянии. Как правило такой картон используется в качестве материала для коробок из -под бытовой аппаратуры, компьютерной техники.
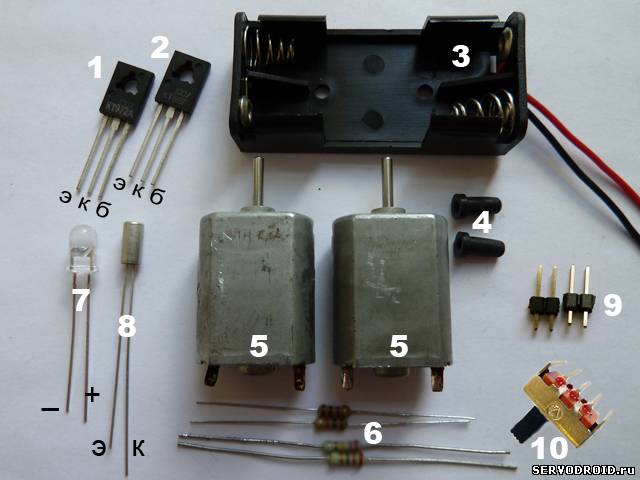
ВСПОМОГАТЕЛЬНЫЕ МАТЕРИАЛЫ Для сборки робота потребуются вспомогательные материалы показанные на фото.4.
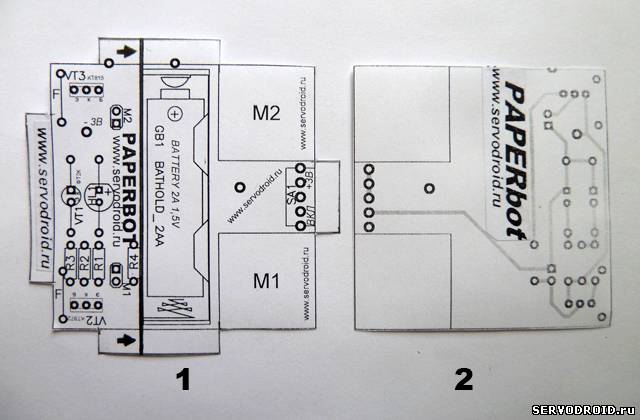
Примечание.3. Возможно потребуется точнее подобрать сопротивление резистора R2. Его можно изменять, но в небольших пределах. На фото.5. Скачайте размещённый в конце страницы, в архиве. В архиве два шаблона для верхней стороны (montag) и нижней стороны (bottom). Шаблон выполнен в точных натуральных размерах. Распечатайте шаблон на листе офисной бумаги формата А4. Вырезайте шаблоны для верхней (1) и нижней (2) сторон по толстым контурным линиям. На верхнем шаблоне указаны посадочные места радиокомпонентов (монтажный чертёж). На нижнем шаблоне серыми линиями показаны электрические соединения между радиокомпонентами.
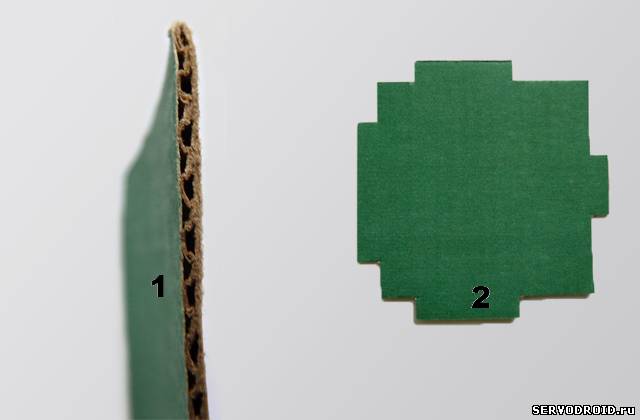
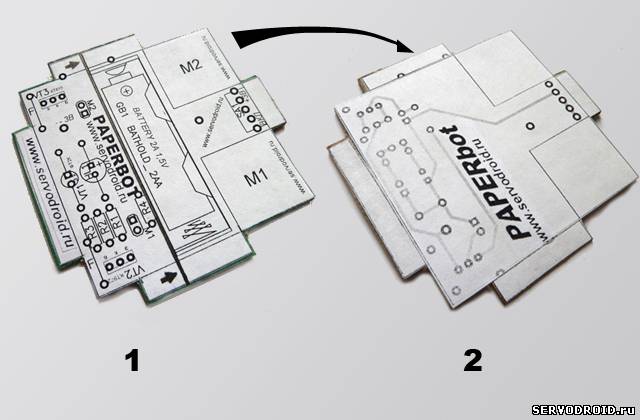
нажимайте фото для открытия в полном размереНа фото.6. Подготовьте плотный, но тонкий гофрокартон. Обратите внимание на то, как выглядит гофрокартон в разрезе (фото.6). Изготовьте из тонкого и плотного гофрокартона основу под монтажную плату. Для этого просто переведите контуры с любого из шаблонов на гофрокартон и вырезайте по контуру ножницами. В результате должна получиться форма(2) как на фото.6. На фото.7. Наклейте на полученную форму из картона с одной стороны верхнюю(1) часть чертежа монтажной платы. А с другой стороны наклеивайте чертёж нижней(2) части монтажной платы.
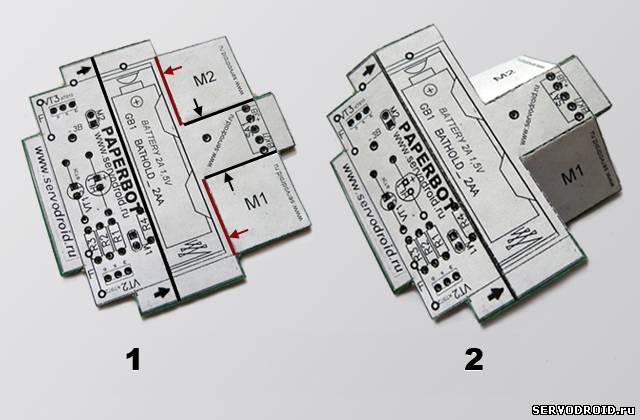
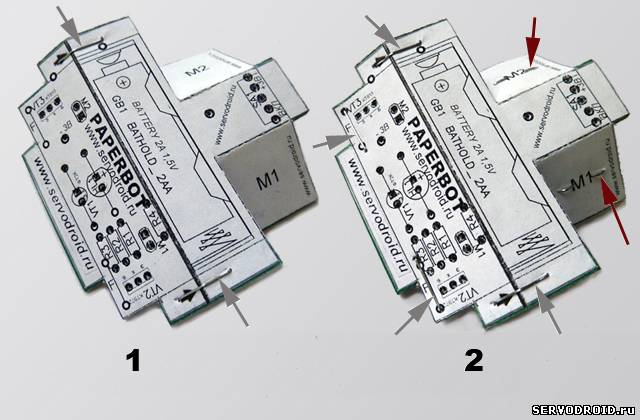
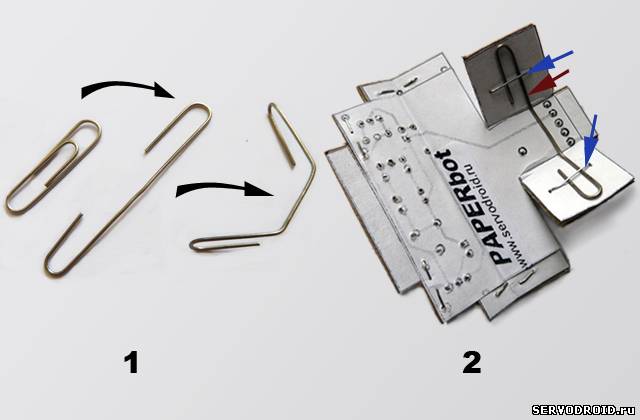
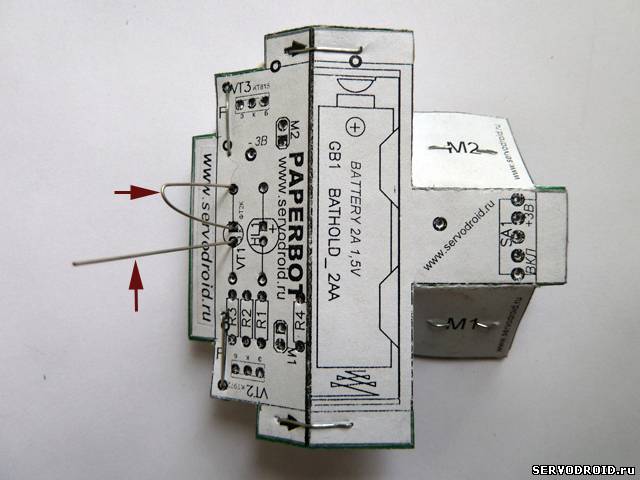
На фото.8. Просверлите отверстия шилом в местах установки радиокомпонентов(1). Вырезайте ножницами по толстым красным линиям, на которые указывают красные стрелки на фото.8(1). Обратите внимание на то, что на архивных чертежах красных линий и стрелок нет, здесь они показаны для упрощения сборки. Выполните сгибы по толстым чёрным линиям, на которые указывают чёрные стрелки на фото.8(1). Чтобы линии сгиба были ровными, нужно предварительно провести по ним тупым концом ножниц по линейке. Результат проведённых действий показан на фото.8(2). На фото.9(1). Возьмите степлер и установите скобы на позициях помеченных белыми стрелками (1). Эти скобы установленные по бокам монтажной платы являются рёбрами жёсткости. После установки этих скоб степлера немного согните их монтажными плоскогубцами. Теперь сгиб монтажной платы по толстой чёрной линии будет удерживаться этими скобами в заданном положении. На фото.9(2). В передней части монтажной платы найдите два коротких отрезка линий помеченных буквой F. С помощью степлера установите скобы на эти позиции. Их назначение элементы крепежа при монтаже радиокомпонентов (транзисторов). Теперь необходимо смонтировать силовую раму для крепежа моторов.Красные стрелки указывают на элементы этой силовой рамы. А сборка этой рамы будет приведена дальше по инструкции. На фото.10. Возьмите скрепку канцелярскую и выгибайте последовательно так как показано на фото.10(1). Установите выгнутую скрепку на позицию в задней части печатной платы(2). Скрепка на позиции помечена красной стрелкой. Чтобы выгнутая скрепка держалась её необходимо зафиксировать скобой, с помощью степлера. Скобы на позициях помечены синими стрелками. Необходимо зафиксировать скрепку с двух сторон. нажимайте фото для открытия в полном размере
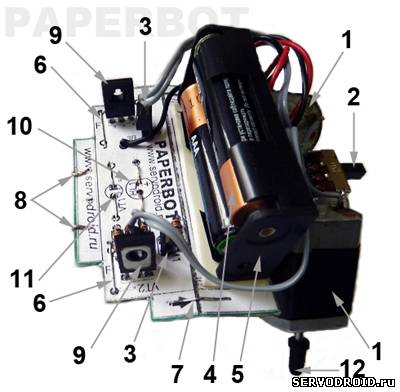
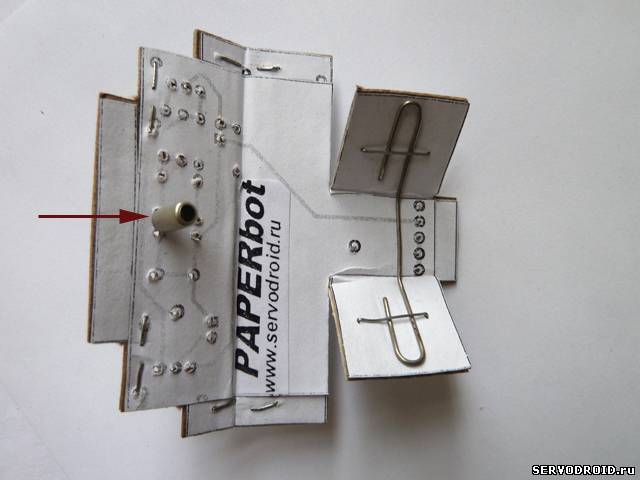
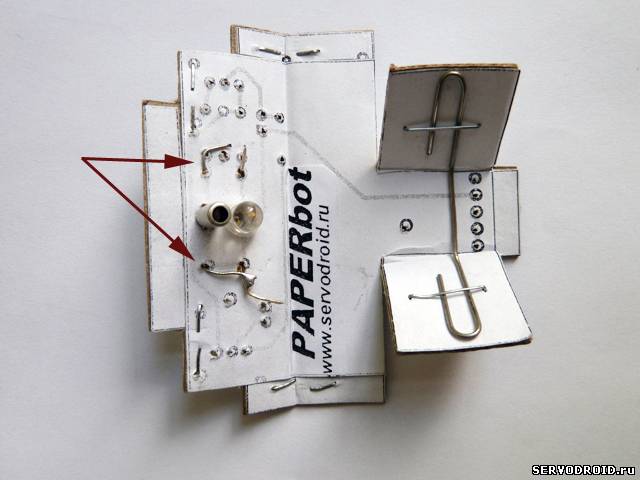
Шаг.2.Монтаж радиокомпонентов. Монтаж радиокомпонентов начинайте с установки фототранзистора Фт2К и инфракрасного светодиода. Оба компонента устанавливают с тыльной стороны (снизу). Для правильного монтажа используйте топологию выводов фототранзистора и светодиода показанную на фото.3. На фото.11. Возьмите фототранзистор и установите его снизу на позицию VT1, ориентируясь по верхнему монтажному рисунку. Будьте внимательны вывод эмиттера и вывод коллектора фототранзистора должны оказаться на своих местах указанных на рисунке чертежа монтажной платы сверху. На фотографии фототранзистор помечен красной стрелкой. После установки корпус фототранзистора должен касаться поверхности. На фото.12. Выгибайте выводы фототранзистора и пропускайте через рядом расположенные отверстия соединённые прямой линией на чертеже. Чтобы качественно и правильно выполнить монтаж фототранзистора, делайте это с помощью монтажных плоскогубцев. На фото.13. Аналогично установите инфракрасный светодиод RBC-43-C (позиция HL1). Результат монтажа фототранзистора и светодиода показан на фотографии. нажимайте фото для открытия в полном размере
На фото.14. Обратите внимание на серые линии соединяющие отверстия с противоположной стороны. Это правильные электрические соединения, которые нанесены специально для облегчения монтажа радиокомпонентов. После того как выводы фототранзистора VT1 и светодиода HL1 продеты их необходимо загнуть так как показано на фотографии. А вывод анода (+) светодиода HL1 и вывод коллектора фототранзистора необходимо запаять вместе. На фото.15. Воспользуйтесь таблицей.1 со списком радиокомпонентов для правильной установки всех резисторов на позиции R1,R2,R3,R4. На фото.16. Красными стрелками помечены области монтажа выводов резисторов. Выполните соединения пайкой используя разметку соединительных серых линий и фото.16. нажимайте фото для открытия в полном размере
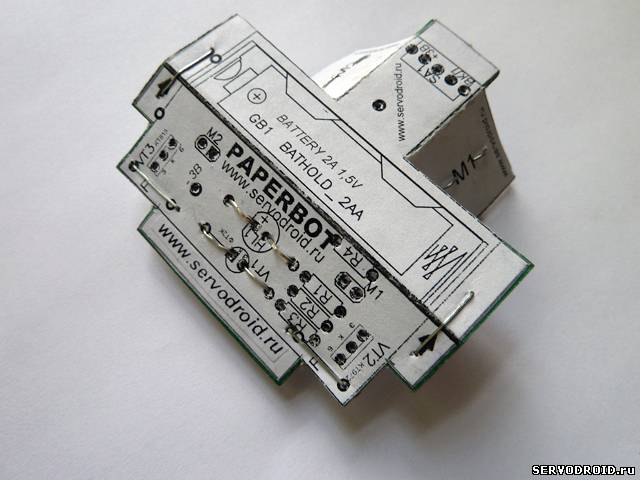
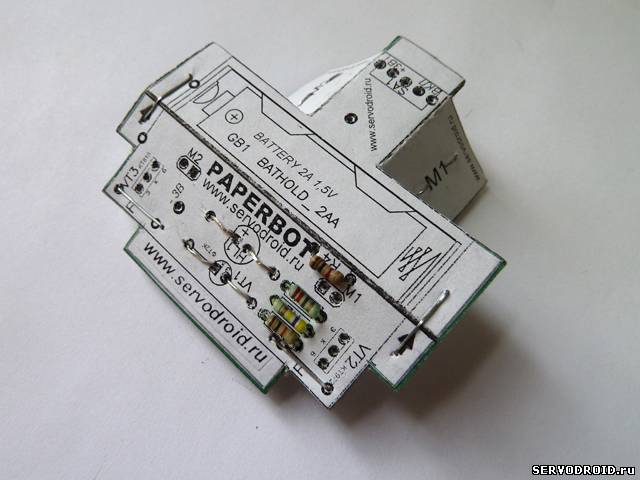
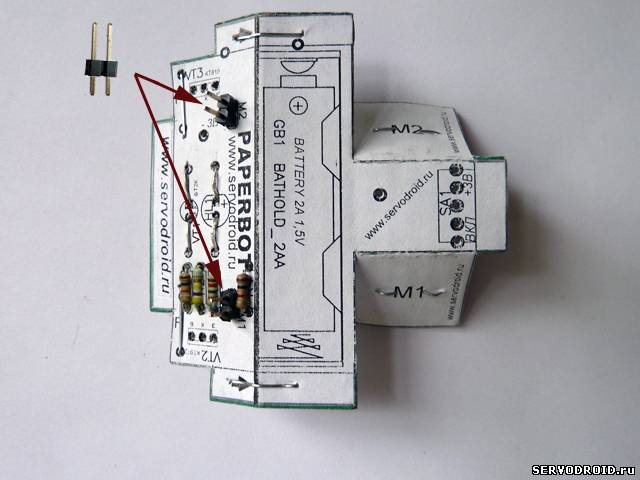
На фото.17. Для подключения моторов на монтажную плату необходимо установить на позициях M1 и M2 штыревые разъёмы. После установки выполните подключение (пайку) разъёмов с противоположной стороны. На фото.18. Штыревой разъём на позиции M2 подключают одним выводом к выводам фототранзистора и светодиода. Штыревой разъём на позиции M1 подключают одним выводом к выводу резистора R4. На фото.19. Установите на позицию VT2 транзистор КТ972A, на позицию VT3 транзистор КТ815А. Серые стрелки указывают на эмиттер каждого из транзисторов. нажимайте фото для открытия в полном размере
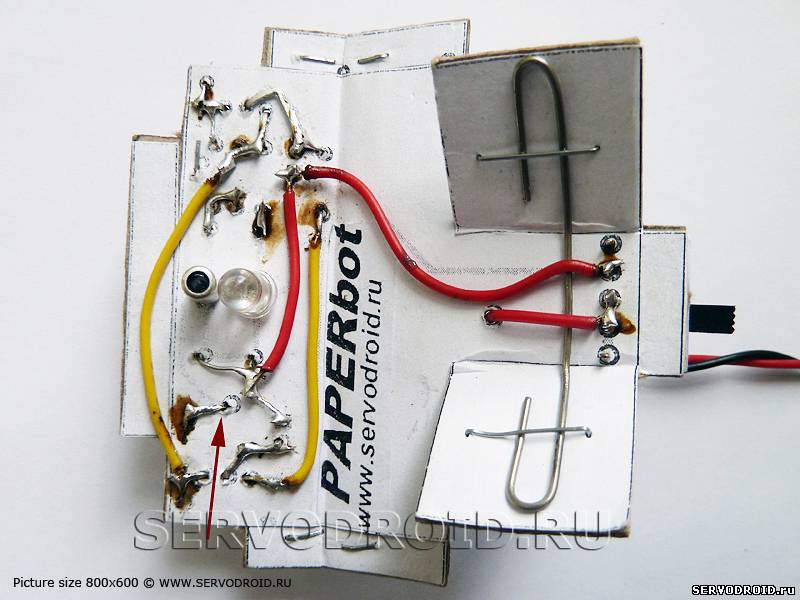
На фото.20. Красными стрелками показана позиция установки транзисторов. После установки транзисторов VT2,VT3 выгибайте их выводы как на фотографии. Найдите выводы транзисторов VT2,VT3 расположенные ближе к установленным скобам. маркированным буквой F. Скобы используются как элемент крепежа для надёжной установки транзисторов на монтажной плате. Для транзистора VT2 близкий к скобе вывод базовый (б), для транзистора VT3 близкий к скобе вывод эмиттера (э). Припаяйте эти выводы к скобе предварительно её залудив припоем. После пайки выводов транзисторов к скобам проверьте чтобы соединение было надёжным. На фото.21. Кроткими монтажными проводами жёлтого цвета выполните соединения показанные на фотографии. Первым проводом соедините свободный вывод резистора R4 и вывод базы транзистора VT3. Вторым проводом соедините вывод эмиттера транзистора VT2 и вывод эмиттера транзистора VT3. На фото.22. Коротким монтажным проводом красного цвета выполните соединение плюсового вывода светодиода HL1 и свободного вывода штырькового разъёма M1. нажимайте фото для открытия в полном размере
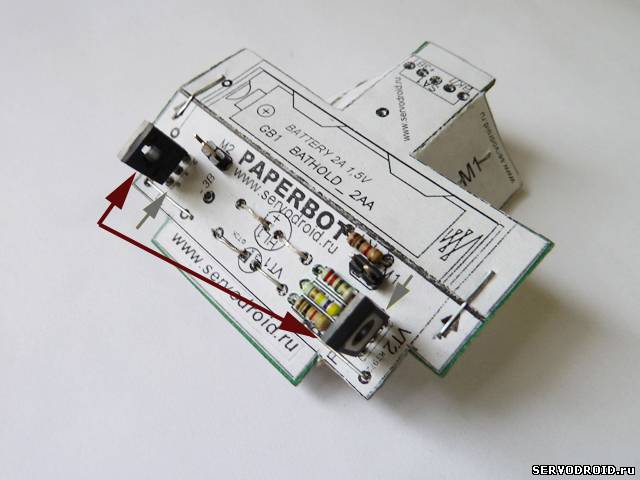
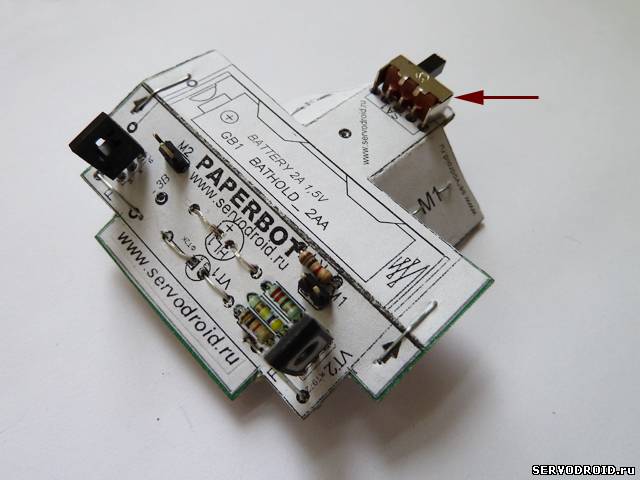
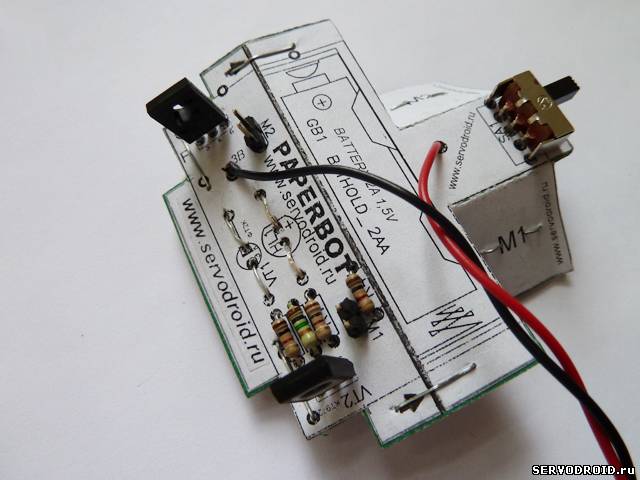
На фото.23. Установите микропереключатель на позицию SA1. На фотографии, микропереключатель с горизонтальной установкой помечен красной стрелкой. На фото.24. Коротким монтажным проводом красного цвета выполните соединение вывода микропереключателя отмеченного красной стрелкой и второго красного провода. Красный провод является плюсовым проводом подводящим положительный потенциал от источника питания. На фото.25. Возьмите двухсекционный футляр для батареек типоразмера "AAA". Отходящий от него красный провод-это плюс источника питания, а чёрный-минус. Найдите на монтажном чертеже отверстие с маркировкой -3В. Установите в него черный провод идущий от футляра батареек. Красный провод идущий от футляра батареек проденьте через отверстие расположено рядом с выключателем питания. нажимайте фото для открытия в полном размере
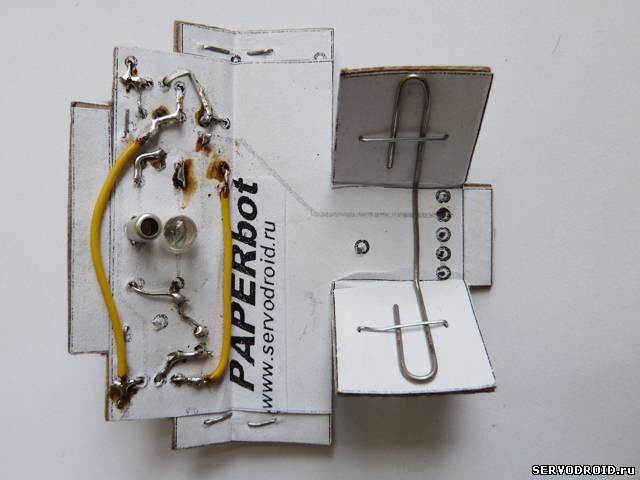
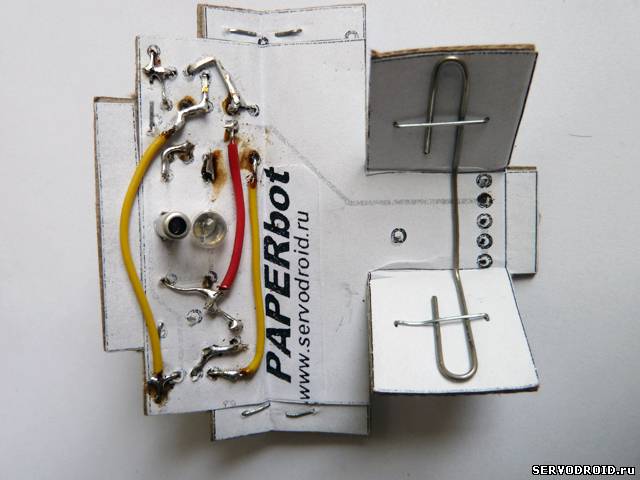
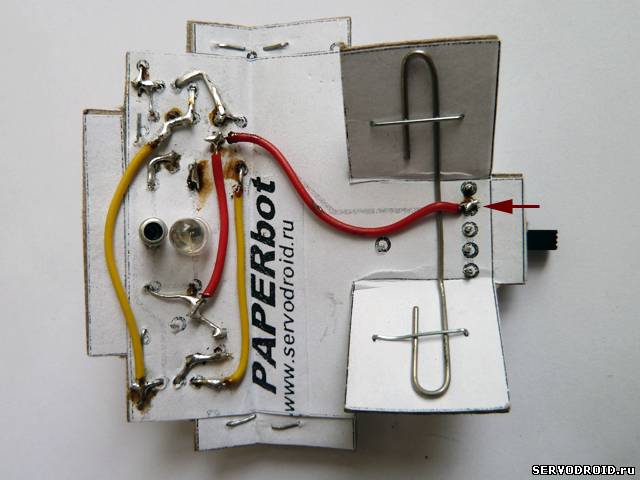
На фото.26. Паяйте красный провод идущий от футляра батареек к двум выводам микропереключателя. Паяйте чёрный провод к близко расположенной скобе подключенной к жёлтому проводу. Место выхода чёрного провода от футляра помечено красной стрелкой. На фото.27. На позициях для моторов M1,M2 прикрепите прямоугольные полоски двустороннего скотча(2). Так как двусторонний скотч имеет две клейкие стороны, то делать это нужно аккуратно. Назначение скотча устранение проскальзывания моторов после крепежа. Установите один мотор на позицию и надавите, после этого мотор прикрепиться к клейкой стороне двустороннего скотча. После этого приматывайте мотор к позиции изоляционной лентой (3). Аналогично закрепите второй мотор на позиции. На валы обоих моторов оденьте резиновые колпачки(1) от гелиевого стержня, они послужат протекторами для сцепления с поверхностью. На фото.28. Показана правильная установка моторов по отношению к поверхности. нажимайте фото для открытия в полном размере
На фото.29. фото.30, фото.31. Изготовьте переднюю опору из канцелярской скрепки ориентируясь по приведённым фотографиям. Согните её в П-образную форму. Для того, чтобы опора держалась закрепите её выгибая на краях с помощью инструмента. нажимайте фото для открытия в полном размере
6.НАСТРОЙКА РОБОТА. Настройка робота несложна и заключается с регулировке расстояния между моторами и регулировке расстояния между поверхностью и фототранзистором. Прежде чем проводить настройку проведите проверку по приведённым ниже рекомендациям. нажимайте фото для открытия в полном размере
1.ПРОВЕРКА СВЕТОДИОДА HL1. Убедитесь, что светодиод HL1 действительно излучает инфракрасный свет. Чтобы зарегистрировать (увидеть) инфракрасное излучение потребуется сотовый телефон со встроенным фотоаппаратом. Переключите сотовый телефон в режим фотографирования и наведите на светодиод. На жк-экране телефона вы увидите, что светодиод светиться беловато-синеватым светом, что означает исправность светодиода и схемы подключения. Если светодиод будет тёмным, то необходимо проверить его подключение по приведённым фотографиям и электрической схеме рис.1. 2.ПРОВЕРКА ФОТОТРАНЗИСТОРА. Проверьте реакцию фототранзистора на чёрный цвет (линию трассы). Удерживая робота рукой попеременно поместите его на чёрной трассой и над белым полем. Во время перемещений должны переключаться поочерёдно двигатели. Если этого не происходит проверяйте цепи подклчения моторов ориентируясь по фотографиям и электрической схеме рис.1. 3.НАСТРОЙКА ДВИЖЕНИЯ ПО ТРАССЕ. Все испытания необходимо проводить только со "свежими" батарейками! Установите робота на край трассы и включите. Если робот не реагирует на трассу (чёрный цвет), то вам необходимо путём сгиба/отгиба передней части (по толстой линии сгиба) приблизить или отдалить пару фототранзистор-светодиод от поверхности трассы. Если робот неуверенно передвигается по трассе, часто сходит, то подгибайте навстречу друг другу (внутрь) силовую раму с закрепленными на ней моторами. Чем более вертикально ориентированы моторы, тем робот будет более увереннее держаться на трассе. Но, чрезмерно сгибать силовую раму и приближать моторы друг к другу тоже не рекомендуется. Сборка робота закончена! Первый архив содержит чертежи для сборки робота. Второй архив содержит трассу для соревнований linebot на 16 листах формата А4. Скачать архив с чертежами, пароль к архиву Dix100 Скачать архив с трассой на 16 листах. Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим! автор Алексей Высоковольтный www.servodroid.ru © Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
| |||||||||||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||||||||||









| Всего комментариев: 36 | |


| |









