21:56 ЭЛЕКТРОННЫЙ ТАРАКАН |
 Электронный таракан – это робот, имитирующий поведение таракана, с системой сенсорных
датчиков-усов. Снабжённый фотодатчиками таракан бежит за ярким источником
света, например от фонарика, или светом от настольной лампы. С помощью датчиков-усов,
он определяет столкновение с предметами и способен преодолевать препятствия,
обходя ихПрикосновение к предметам
левого или правого датчика-уса приводит к повороту таракана в противоположную
сторону. Одновременное прикосновение к двум тактильным сенсорам вызовет отъезд
робота назад на некоторое расстояние. |
1.ВИДЕОТЕСТЫ РОБОТА.
Через панель навигации видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель навигации доступна после запуска видео, справа внизу значок пиктограммы. Перед запуском каждого видеофрагмента автоматически выводится его название в верхнем левом углу. В нижней части окна проигрывателя слева название плейлиста и количество сгруппированных видеофрагментов.
На видео.2. Проводится тестирование тактильных сенсоров-усов. Касание левого тактильного уса вызывает поворот вправо, а правого -поворот влево. Одновременное прикосновение к двум тактильным сенсорам вызовет отъезд робота назад на некоторое расстояние.
На видео.3.Электронный таракан маневрирует между пластиковыми цилиндрами управляемый лучом света от фонарика.
ВСЕ РОБОТЫ на канале DROID1020 !!! подпишись и смотри. Переход по ссылке жми!
ALL ROBOTS on the DROID1020 channel! ! ! be signed and look. Transition according to the link
На фото.1 и фото.2 показан электронный таракан в сборке. С электронным тараканом можно провести множество разнообразных игр.
 Фото.1 |  Фото.2 |
Пять игр для самостоятельного прохождения предложены ниже.
Игра.1. "Слалом”. Расставьте несколько пять кеглей с интервалом в 50см. друг от друга на одной линии. Очертите или отметьте на одном конце этой шеренги стартовую площадку, а другом финиш. Установите таракана на старте. Возьмите фонарик и, управляя тараканом с помощью луча, света заставьте его обойти все кегли. Ваша задача провести таракана до финиша, не сбив ни одной кегли. При отсутствии кеглей можно взять пластмассовые или жестяные бутылки из-под газировки.
- КОРПУС. Печатная плата робота используется для монтажа радиокомпонентов и является основой, корпусом для монтажа шасси. В качестве сигнальной системы робота установлены три светодиода, которые расположены впереди и сзади на печатной плате.
- ИНДИКАТОР ПИТАНИЯ. Светодиод расположенный на печатной плате сзади-это индикатор питания. Светодиод вспыхивает сразу после включения питания и сигнализирует
о включении питания и нормальном уровне напряжения на батарейке. Когда батарея
сильно разрядится, светодиод погаснет. Для снижения тока потребления этот светодиод должен быть мигающим.
- ИНДИКАТОРЫ РАБОТЫ ГЕНЕРАТОРОВ. Светодиоды, расположенные впереди на печатной плате робота, сигнализируют о нормальной работе двух управляемых генераторов импульсов. Освещение левого или правого фототранзисторов вызывает изменение частоты и длительности вспышек светодиодов. Эти светодиоды также реагируют световой вспышкой на касание датчиков-усов. Назначение сигнальной системы: индикация режимов работы и упрощение настройки, если это необходимо, например, при ошибках в монтаже или "севшем” источнике питания.
- ФОТОСЕНСОРЫ. В отсутствии яркого источника света или пониженного светового фона (вечерний комнатный свет) электронный таракан "засыпает”, медленно передвигается или совсем останавливается. Стоит только повыситься общему уровню освещения, например, при ярком солнечном свете или посветить фонариком на фотоэлементы как таракан вновь "оживает” и приходит в движение. Чем ярче источник света, тем быстрее бежит таракан. Необычная схема поведения робота-таракана позволяет дополнительно экономить ресурс батареи.
- УПРАВЛЕНИЕ МОТОРАМИ. Управление двигателями робота осуществляется в импульсном режиме по реверсивной схеме повышающей проходимость и маневренность. Стиль передвижения таракана как у насекомого – зигзагами, что обеспечивает большую экономичность, продлевая ресурс батареи.
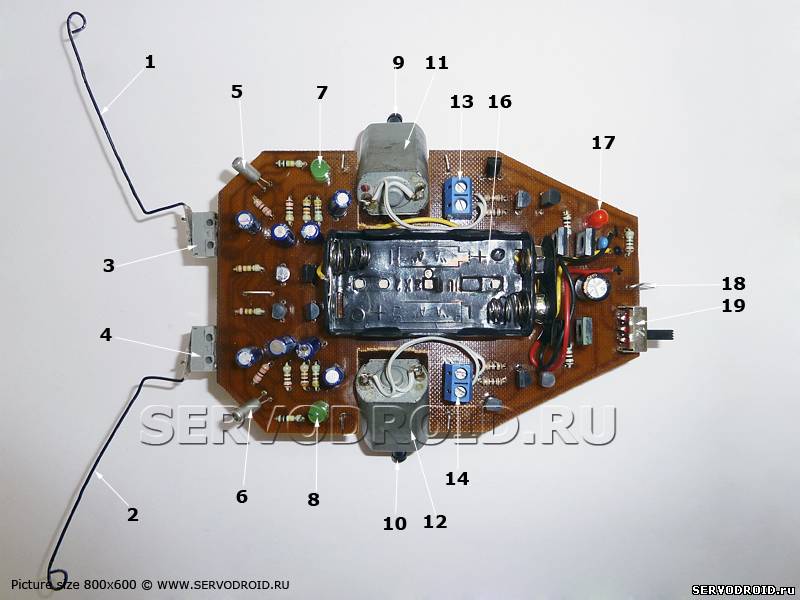 фото.3.Вид сверху 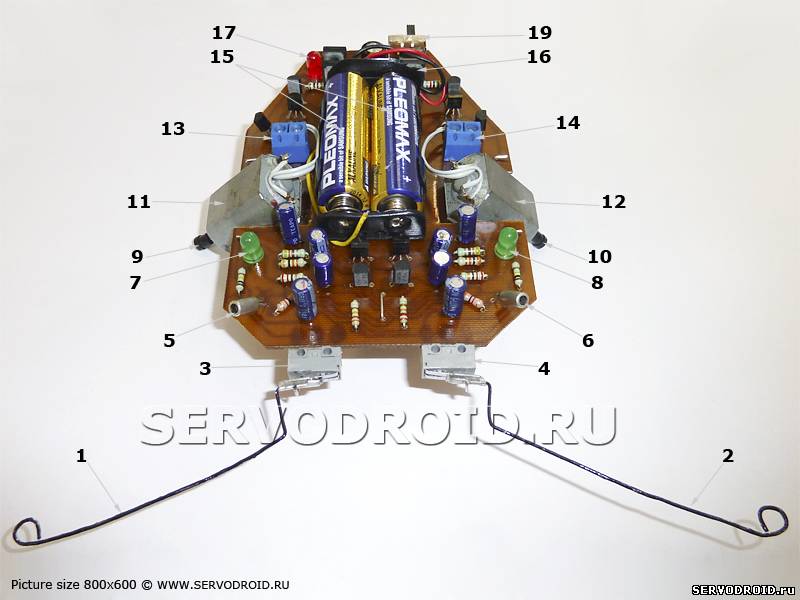 фото.4.Вид спереди. | КОМПОНЕНТЫ КОНСТРУКЦИИ РОБОТА 1. Правый тактильный датчик-ус. 2. Левый тактильный датчик-ус.3. Правый микропереключатель с металлической полоской 4. Левый микропереключатель с металлической полоской. 5. Правый фототранзистор (ФТ2К). 6. Левый фототранзистор (ФТ2К). 7. Правый светодиод зелёного (или красного) цвета свечения 8. Левый светодиод зелёного(или красного) цвета свечения. 9. Правый резиновый протектор. 10.Левый резиновый протектор. 11.Правый мотор тип PPN13LB11C. 12.Левый мотор тип PPN13LB11C. 13.Разъём подключения правого мотора. 14.Разъём подключения левого мотора. 15.Батарейки типоразмера "AA". 16.Футляр двухсекционный для батареек "AA". 17.Мигающий светодиод красного цвета свечения. 18.Задняя опора (из канцелярской скрепки). 19.Микровыключатель с горизонтальной посадкой. Примечание.1. Светодиоды HL1,HL2 расположенные в передней части печатной платы зелёного цвета свечения можно заменить на светодиоды красного цвета свечения. Примечание.2. Мигающий светодиод HL3 расположенный сзади на печатной плате можно заменить на обычный немигающий, но в этом случае возрастёт ток потребления. Кроме того мигающий светодиод более информативен, заметен на роботе. Примечание.3. Протекторы устанавливаются для нормального сцепления с поверхностью. В качестве протектора возьмите резиновый колпачок от нового гелиевого стержня. Примечание.4. Если вы используете батарейки типоразмера "AAA" ("мизинчиковые"), то футляр должен иметь аналогичные размеры. Примечание.5. Тактильные датчики-усы загнуты на концах в круг. Это необходимо для того чтобы избежать травмы концами скрепки. Примечание.6. Соединение (закрепление) тактильных датчиков-усов с металлической платиной микропереключателя выполняют с помощью термоусадочной трубки. Термоусадочная трубка сужается в диаметре при нагреве, допустим паяльником. Фото.3, 4 нажимайте фото для просмотра в полном размере. |
3.ПРИНЦИП РАБОТЫ.
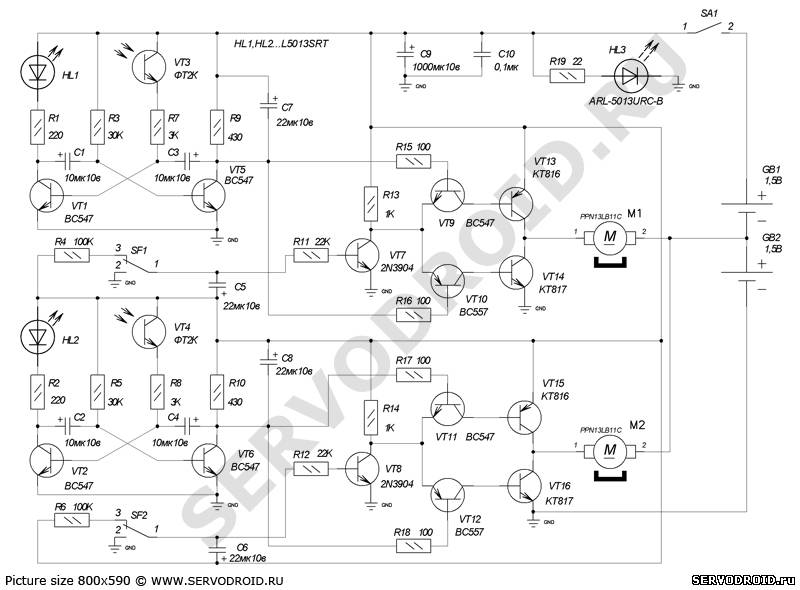 Рис.1. Электрическая схема. Нажать фото для увеличения. | Транзистор
VT9 периодически открывается положительными импульсами,
поступающими от генераторов на транзисторах. Усиленные им импульсы поступают на
мощный транзистор VT13, который подаёт их к
двигателю M1 на левый по схеме вывод. Так
как двигатель M1 правым по схеме выводом
подключен к общему потенциалу соединенных батареек, то появление положительного
потенциала на втором выводе подключает его к батарейке GB1. При этом вал двигателя M1 будет вращаться в одном направлении, допустим по
часовой стрелке. Изменить направление вращения вала двигателя можно, если
кратковременно коснуться микропереключателя SF1. Тогда через вывод 2 микропереключателя мгновенно
зарядится конденсатор C5 до уровня
напряжения питания около 3 вольт. Высокий уровень на базе транзистора VT7 смениться низким и транзистор закроется. Далее
микропереключатель возвратится в исходное состояние, а конденсатор С5 начнёт
разряжаться через резистор R4. Время
разрядки конденсатора C5 и определит
время в течение, которого будет закрыт транзистор VT7. Одновременно закроется транзистор VT9, а транзистор VT10 откроется импульсы, поступающие на его базу, будут
усилены и поступят на мощный транзистор VT14. Теперь левый по схеме вывод двигателя M1 будет подключен через минусовой потенциал к
батарейке GB2. Направление вращения вала
двигателя изменится на противоположное, то есть против часовой стрелки. Таким образом, фототранзистор
VT3 управляет скоростью вращения вала двигателя M1, а микропереключатель SF1
(датчик-ус) направлением вращения вала двигателя. Если фотодиод одной части
схемы будет освещён сильнее чем другой, то робот будет поворачивать. Если оба
фототранзистора VT3,VT4 будут освещены одинаково, то робот будет быстро
передвигаться вперёд. |
Если фотодиоды будут слабо освещены, то робот остановится. Срабатывание только одного микропереключателя SF1 или SF2 вызовет разворот в одну из сторон. Срабатывание обоих микропереключателей вызовет реверс направления вращения двигателей, и робот поедет назад. Точно так же работает вторая половина схемы робота. Конструктивно фотодиоды и тактильные датчики разнесены на некоторое расстояние. Это позволяет избирательно фиксировать моменты столкновения с объектами и распределять световые потоки по своим частям.
Таблица.1.Список радиокомпонентов.

5.ИНСТРУКЦИЯ ПО СБОРКЕ.
1.Изготовление печатной платы.
После изготовления печатной платы проверьте токоведущие дорожки на возможные замыкания. Затем выполняйте монтаж всех указанных в таблице 1 радиокомпонентов.
Подготовьте односторонний лист стеклотекстолита размерами не менее чем 122x82мм, то есть на 2мм больше чем размеры печатной платы. Предварительно зачистите поверхность стеклотекстолита, промойте и высушите. Выполните перевод только контура печатной платы на кальку. Далее с кальки необходимо через копирку перевести сложный контур на подготовленный лист стеклотекстолита. Вырезайте контур печатной платы с помощью инструмента. Далее выполняйте перевод по уже известной методике ЛУТ, рисунка токоведущих дорожек.
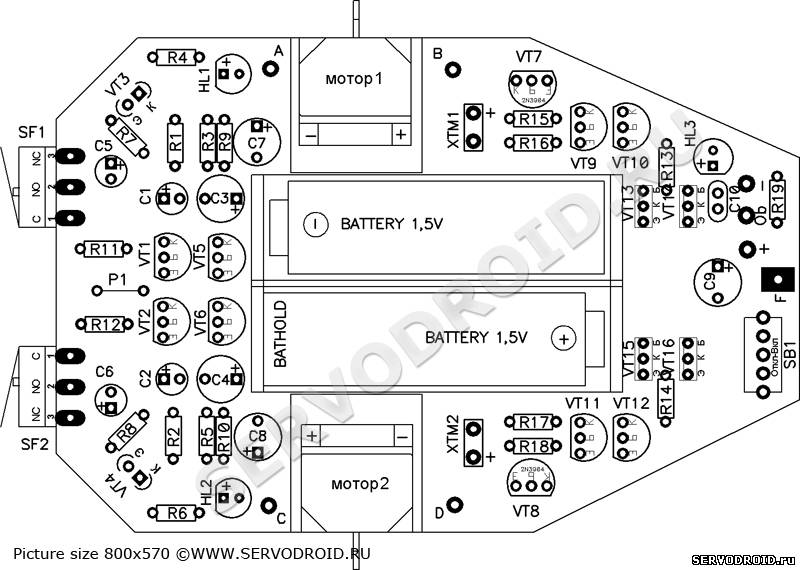
Рис.2.Монтажный чертёж. Нажать фото для увеличения.
После проведения боковых пропилов или срезов на линии предполагаемого сгиба выполните слом с помощью монтажных плоскогубцев. Чтобы упростить эту задачу можно по будущей линии сгиба простучать кернером, то есть сделать маленькую канавку. Можно сделать канавку на линии будущего сгиба с помощью шила. Залудите припоем область (2) показанную на фото.5.
Короткими линиями показаны площадки (3) токоведущих дорожек для установки микропереключателей. По три площадки для каждого микропереключателя. Эти площадки должны быть предварительно залужены. Далее будет показано как это сделать правильно.
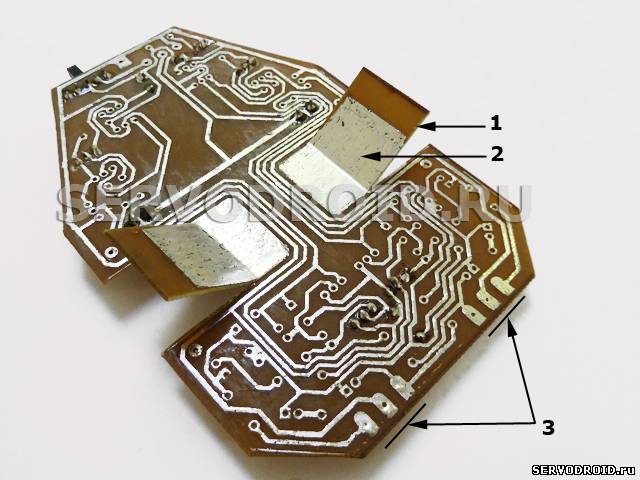 Фото.5. | 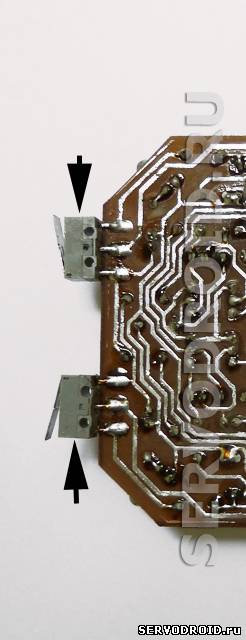 Фото.6. |
3.Монтаж микропереключателей.
Микропереключатели служат в качестве сенсоров касания, для определения столкновения с предметами. устанавливают спереди со стороны токоведущих дорожек. Микропереключатели устанавливают со стороны токоведущих дорожек и напаивают параллельно печатной плате (фото.6)
 Фото.7 |  Фото.8 |
5.Подготовка и установка моторов.
Снимите защитную плёнку с двустороннего скотча. Осторожно прижмите каждый мотор(1) к силовому крылу(2). Двусторонний скотч надёжно сцепит поверхность крыла с корпусом мотора.
Согните силовые крылья приблизительно под углом 35-45 градусов (фото.10). Размер угла зависит от габаритов мотора, высоты вала каждого из мотора и формы протектора. Затем в двух местах(3), ближе к краю крыльев закрепите их пайкой (фото.11).
 Фото.9 | 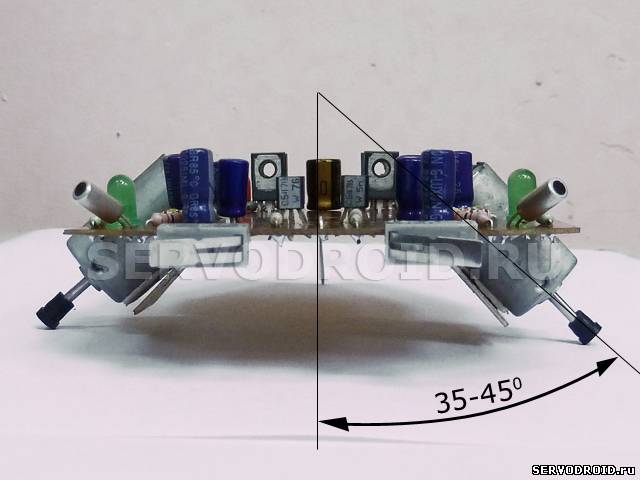 Фото.10 |
6.Монтаж фиксатора силового крыла.
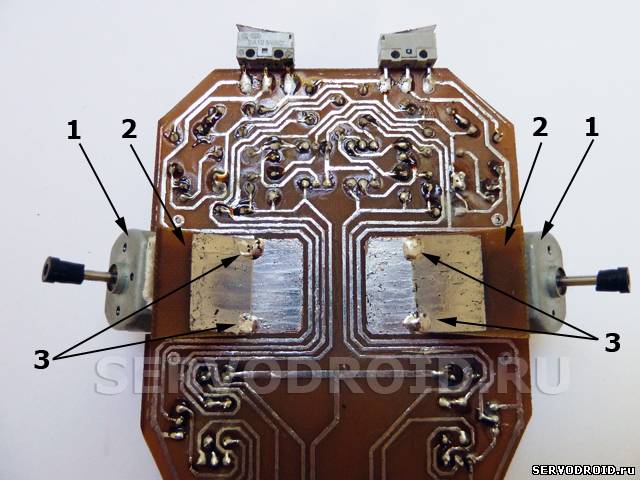 Фото.11 |  Фото.12 |
Со стороны радиокомпонентов подпаяйте к контактным выводам моторов монтажные проводки. Затем подключите моторы через монтажный провод к рядом расположенным разъёмам (фото.14).
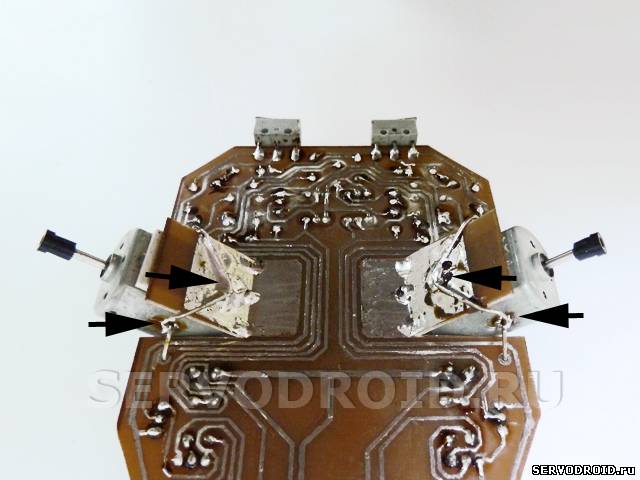 Фото.13 |  Фото.14 |
Обратите внимание на монтаж фототранзисторов, они должны быть немного разведены в стороны (фото.14).
7.Монтаж задней опоры.
На печатной плате сзади найдите прямоугольную площадку для монтажа задней опоры. Проведите лужение площадки припоем. Проденьте выгнутую скрепку через отверстие расположенное в центре прямоугольной площадки и загните концы так как показано на фото.15. Залудите части скрепки расположенные близко к поверхности площадки и запаяйте скрепку-опору в этой области (фото.16).
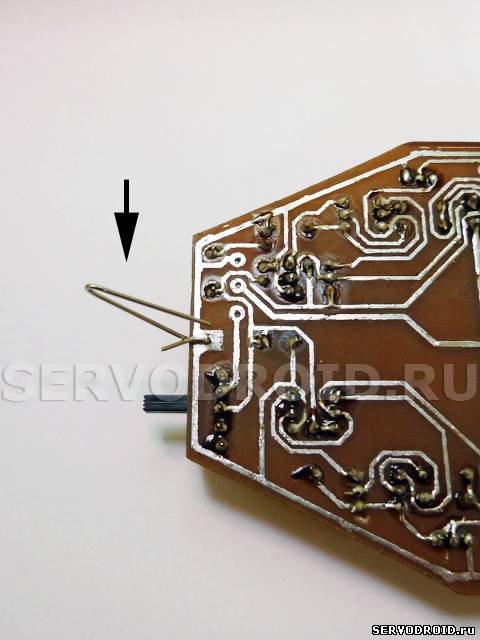 Фото.15 | 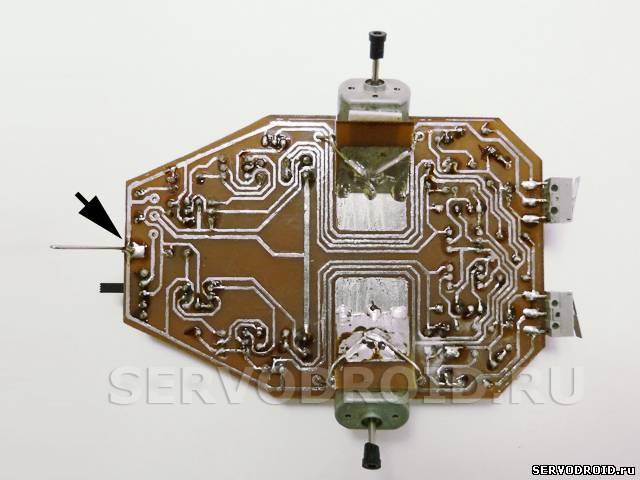 Фото.16 |
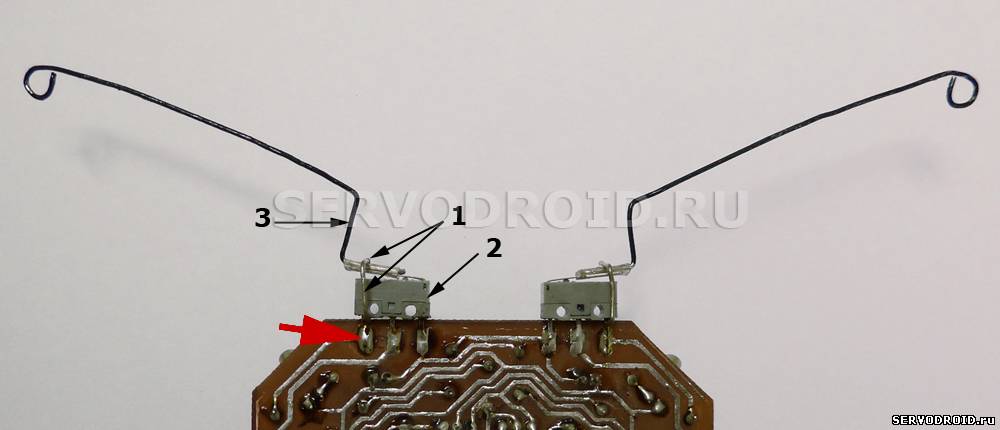
Установка тактильного уса выполняется следующим образом. Для соединения тактильного уса(1) и микропереключателя(2) используйте термоусадочную трубку(3). Вам потребуется кусок термоусадочной трубочки диаметром около 4мм и длиной 10мм. Нажимная часть микропереключателя имеет металлическую пластину. Наденьте трубочку на эту пластинку и загнутый крючком кончик тактильного уса. Сориентируйте тактильный ус так как на фотографиях и начинайте паяльником прогревать термоусадочную трубку по всей поверхности. Во время прогрева трубка начнёт сжиматься (уменьшаться в диаметре) и прижмёт металлическую пластину микропереключателя и тактильный ус (фото.18).
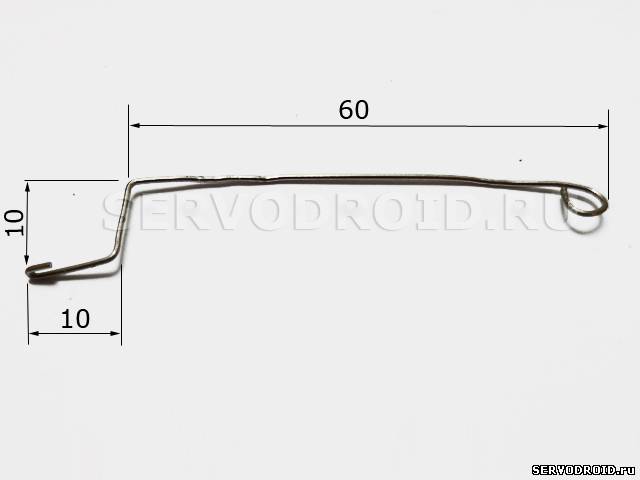 Фото.17 | 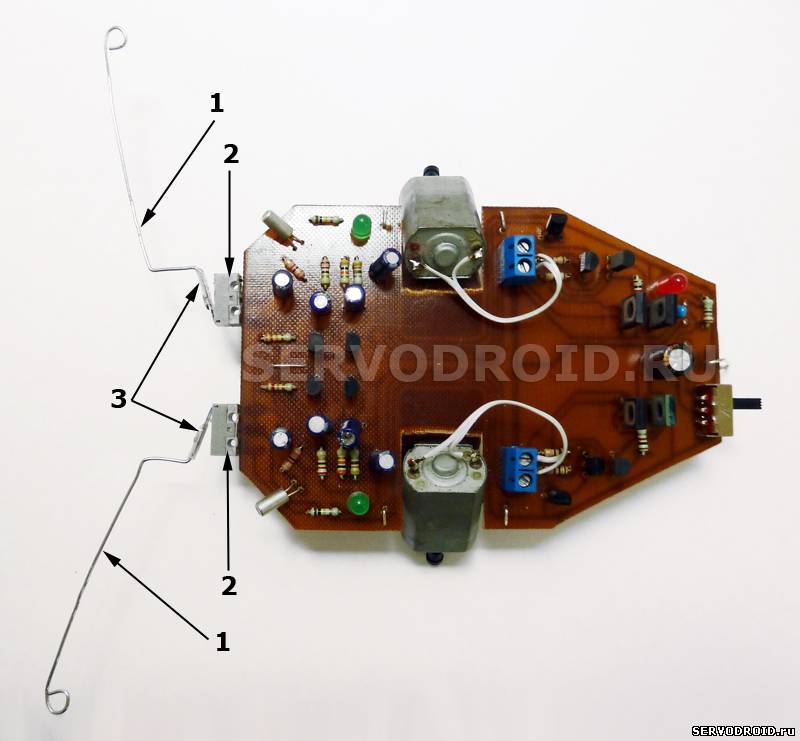 Фото.18 |
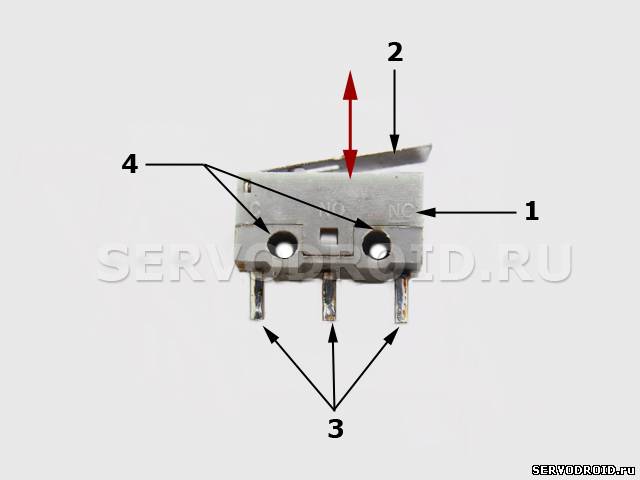 Фото.19 |  Фото.20 |
От футляра отходит два вывода: красный (плюс) и чёрный (минус). В схеме робота используется двухполярное питание, поэтому вам потребуется подключить к футляру ещё один вывод (третий). Возьмите монтажный провод жёлтого цвета (можно любого цвета), зачистите его с обоих концов и залудите обязательно. Посмотрите на фото.22, на место пайки жёлтого провода указывает жёлтая стрелка. Рекомендуется эту поверхность залудить с использованием жидкого нейтрального флюса. Будьте осторожны, стенки футляра выполнены из тонкой пластмассы и быстро оплавляются. Поэтому лудить и паять нужно как можно быстрее.
Обратите внимание на место монтажа (пайки) проводов идущих от футляра к позиции на печатной плате (фото.23). На позиции рядом с тремя отверстиями следующая маркировка: "_" , "O" , "+". К отверстиям с маркировками "-", "+" подпаивайте выводы идущие от футляра красного("+") и черного("-") цвета. К отверстию с маркировкой "O" (общий) подпаивайте идущий от футляра жёлтый провод.
 Фото.22 |  Фото.23 |
Табл.2. ВОЗМОЖНЫЕ ВИДЫ НЕИСПРАВНОСТИ И ИХ УСТРАНЕНИЕ.

Для питания конструкции используйте только "свежие" гальванические элементы/батарейки!
Сборка робота окончена!
 Фото.24 |  Фото.25 |
Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим!
автор Алексей Высоковольтный www.servodroid.ru
© Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
| Всего комментариев: 20 | |

| |





 Замена возможна.
Замена возможна.


