16:27 ГОНОЧНЫЙ ВИБРОБОТ |
 Вибробот - это отдельный класс робот, которые передвигаются за счёт создаваемой двигателями направленных вибрационных волн. Источником виброволн является моторчик с эксцентриком (грузик со смещённым центром тяжести). Собрать простейшего вибробота можно буквально за пять минут при наличии всех комплектующих. Робот способен быстро передвигаться за счёт вибрации создаваемой мотором с эксцентриком. $CUT$С гоночными вибророботами можно устраивать соревнования, например на скорость и точность пробега по выбранной трассе. |
***

---------------------------------------------------------------------------------------------------
-зубная щётка с наклоненной щетиной;
-вибромотор от сломанного старого сотового телефона или пейджера;
-двухсторонний скотч;
-дисковая литиевая батарейка с напряжением 3 вольта (типа CR2032);
-две проволочки (проводка) и немного усердия.
--------------------------------------------------------------------------------------------------

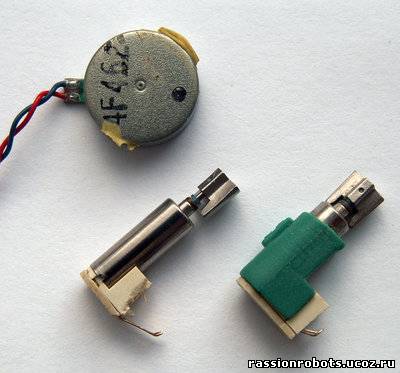

фото.4.Зубная щётка.
Корпусом для вибробота будет обыкновенная зубная щётка (фото.4). Желательно использовать только новую и самую дешевую, какую сможете купить. При покупке, выбирайте зубную щётку с щетиной средней жесткости.

фото.5.Отрезаем зубную щётку.
Кусачками, острым ножом или ножовкой отрезаем головку зубной щётки (фото.5). Если края получаются с заусенцами, обтачиваем их напильником.

фото.6.Выравниваем щетину ножницами.
Обратите внимание на щетину (фото.6). Если она неровная (A), то обязательно подравняйте её с помощью ножниц (B). вы должны получить почти ровную поверхность (С).
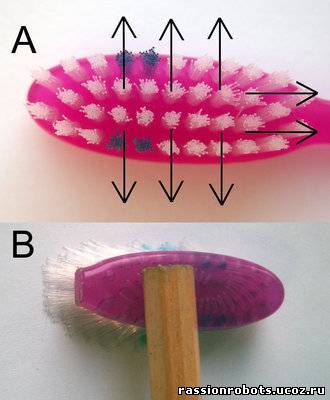
фото.7.Направления сгиба щетины.
Чтобы вибробот был устойчив (не падал) при движении щетину немного распушите в стороны (фото.7A). Чтобы вибробот ехал вперёд придайте щетине продольный наклон (фото.7.B). Сделать это можно сильным нажатием пальца, на фотографии (фото.7.B) показан карандаш для того, чтобы лучше было видно щетину.

фото.8.Приклеиваем двусторонний скотч.
Отрезаем кусочек двухстороннего скотча и приклеиваем к зубной щётке (фото.8). Верхнюю защитную плёнку пока не снимаем.
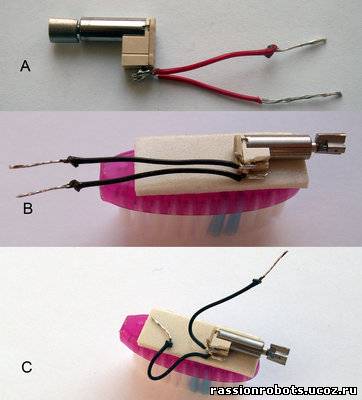
фото.9.Установка и подключение вибромотора.
Подпаиваем два проводка к выводам вибромотора (фото.9.A). Это нужно делать очень осторожно, так как выводы зафиксированы пластмассой, которая легко плавиться. Снимаем верхнюю защитную плёнку со скотча и приклеиваем мотор. Для этого прижимаем вибромотор к клеящейся поверхности (фото.9.B). Проводки выгибаем, так как показано на фото.9.C.
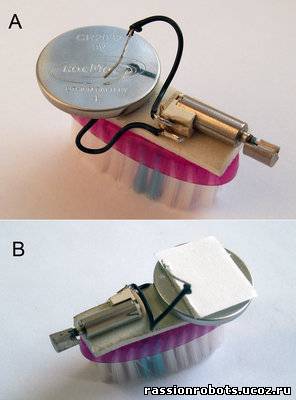
фото.10.Установка и подключение батарейки.

фото.11.Соревнования между двумя виброботами.
Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим!
© Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
| Всего комментариев: 16 | |


| |




