00:10 LiNE TRACER на транзисторах |
 LineTracer на транзисторах-это робот бегущий по линии, с дифференциальной зависимостью фотодатчиков. Робот может не только быстро передвигаться по трассе, но способен на большее. Дифференциальный способ контроля линии позволяет её отслеживать на расстоянии. Это означает, что робот может "делать свечку" пониматься на задние колёса и проезжать трассу с поднятой передней опорой и фототранзисторами. При этом контроль/обнаружение линии ни чуть не ухудшается, а движения робота полностью повторяют геометрию трассы. На корпусе робота предусмотрены две регулировки: дифференциальная чувствительность и регулировка яркости свечения ик-светодиодов. С помощью указанных регулировок можно выполнить оптимальную настройку для лучшего прохождения линии. Робот выполнен полностью на транзисторах! В качестве источника питания используются два гальванических элемента с общим напряжением 3 вольта. |
***
На видео.1.
показано движение робота по трассе в режиме "свечка" по сложному участку трассы "змейка". Такому передвижению способствует смещённый центр тяжести из-за физического расположения источника питания и дифференциальная составляющая выходного сигнала управления моторами.
На видео.2.
показано движение по трассе. Обратите внимание на точное повторение траектории при движении по участку трассы "змейка".
На видео.3. показано движение робота по трассе в
режиме "свечка" по стандартным участкам трассы: повороты, прямая линия. На видео.4. показано движение робота по трассе, которое занимает примерно 12-13 секунд для прохождения одного круга. |
Видеофрагменты 1-4
ВСЕ РОБОТЫ на канале DROID1020 !!! подпишись и смотри. Переход по ссылке жми!
ALL ROBOTS on the DROID1020 channel! ! ! be signed and look. Transition according to the link
 фото.1 |  фото.2 |  фото.3 |
Конструктивно робот полностью выполнен на печатной плате, которая выполняет функцию монтажной поверхности и корпуса. Передача с вала мотора осуществляется на свободно вращающиеся ролики (задние колёса). В передней части расположены две опоры.
2.ИСТОЧНИК ПИТАНИЯ.
Для экономии места размещён на моторах в задней части печатной платы. В качестве источника питания используются две батарейки по 1,5 вольта типоразмера "2A" ("пальчиковые") или "3A" ("мизинчиковые"), установленные в футляре для батареек. Полное напряжение питания составляет 3 вольта.
3.ФОТОДЕТЕКТОРЫ.
Алгоритм работы тактильных датчиков следующий. Столкновение с правым или левым датчиком отдельно вызывает отъезд назад и поворот в сторону. Затем движение вперёд возобновляется. Если робот во время движения задним ходом сталкивается с препятствием, то его движение назад прекращается и он меняет направление на движение вперёд.
5.СИГНАЛЬНАЯ СИСТЕМА.
Сигнальная система выполнена на двух светодиодах красного цвета свечения. Светодиоды позволяют контролировать работу генератора импульсов, упростить настройку или поиск неисправности в схеме робота.
6.РЕГУЛИРОВКИ.
Регулировка дифференциальная осуществляется с помощью подстроечного резистора расположенного в передней части платы. Дифференциальное регулирование даёт возможность выровнять уровни чувствительности фототранзисторов. Такое "выравнивание" необходимо, чтобы при равном освещении фототранзисторов отражённым излучением сигнал поступающий на моторы имел равную длительность и частоту. Не путайте регулировку с дифференциальной зависимостью выходного сигнала от степени засветки фототранзисторов для данной схемы!
Регулировка яркости свечения ик-светодиодов осуществляется с помощью подстроечного резистора расположенного в передней части платы. Изменение яркости свечения ик-светодиодов приводит к прямо пропорциональном изменению отражённого от поверхности излучения. Соответственно больший уровень яркости отражённого излучения приводит к более сильному току у фототранзисторов и следовательно повышает чувствительность. Таким образом регулировка яркости свечения светодиодов позволяет устанавливать уровень чувствительности для фототранзисторов.
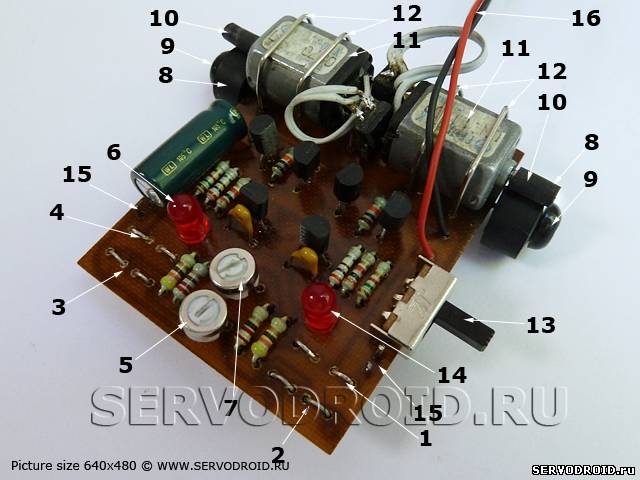 | КОМПОНЕНТЫ КОНСТРУКЦИИ РОБОТА 1.светодиод инфракрасного свечения (монтируется со стороны токоведущих дорожек). 2.фототранзистор фт-2к. 3.фототранзистор фт-2к. 4.светодиод инфракрасного свечения (монтируется со стороны токоведущих дорожек). 5.регулятор дифференциальный (подстроечный резистор R4). 6.светодиод красного цвета свечения. 7.регулятор яркости свечения ик-светодиодов (подстроечный резистор R9) 8.ролик резиновый 12мм. 9.колпак-ограничитель из канцелярской кнопки. 10.протектор (трубочка) резиновый (нипель от велосипеда) 11.моторы FF-030PK. 12.крепёжные п-оразные скобы из канцелярских скрепок. 13.выключатель питания с горизонтальной установкой. 14.светодиод красного цвета свечения. 15.передние опоры из скрепок (монтаж со стороны токоведущих дорожек). 16.провода подключения источника питания. фото.4. нажимайте фото для просмотра в полном размере. |
После включения питания, на схему мультивибратора поступает напряжение 3 вольта. Если робот находится на трассе, а его фототранзисторы расположены над светлым полем, то через фототранзисторы протекает некоторый ток. Ток протекающий через фототранзисторы обусловлен отражённым излучением ик-светодиодов HL2,HL3. Мультивибратор на транзисторах VT1,VT4 начинает работать. На коллекторах транзисторов VT1,VT4 появляются противофазные импульсы с некоторой частотой. Через резисторы R11 и R12 импульсы отрицательной полярности поступают на базовые выводы транзисторов VT5,VT6 и поочерёдно открывают их. В момент когда VT5 открыт VT6 находится в запертом состоянии, и далее наоборот. Потенциал на коллекторном выводе транзистора VT5 возрастает. И при достижении порогового уровня около 0,8-2в открывает подключенный затвором полевой транзистор VT7 (КП505). Проводимость канала у полевого транзистора возрастает в результате левый по схеме вывод мотора M1 оказывается подключенным к минусу источника питания. Через обмотку мотора M1 протекает ток и его вал начинает вращаться.
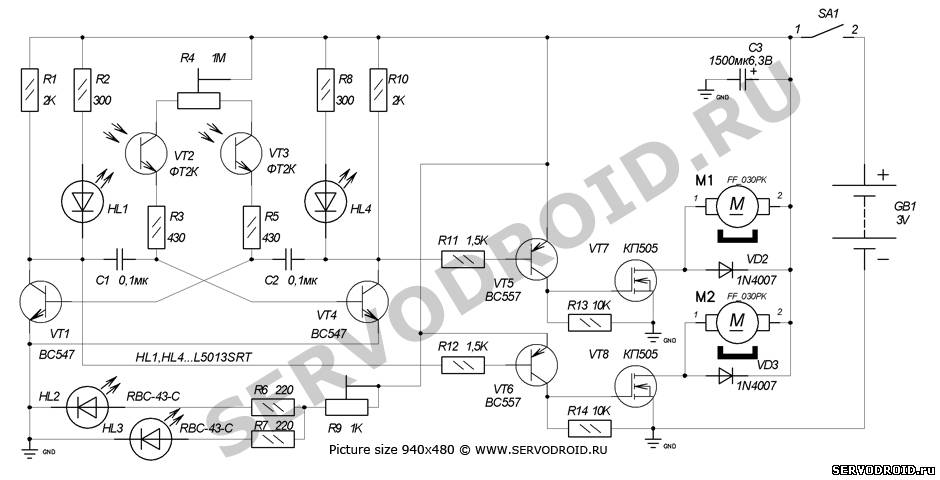 Рис.1.Электрическая схема. нажать фото для увеличения. | Аналогично работает часть схемы управляемая транзистором VT1. В момент
когда VT1 открывается на его коллекторе появляется отрицательный
потенциал. Далее этот потенциал поступает через токоограничительный
резистор R12 на базу транзистора VT6 и открывает его. Через переход
эмиттер-коллектор транзистора VT6 протекает ток в результате на его
коллекторе повышается потенциал. Коллектор транзистора VT6 подключен
непосредственно к затвору полевого транзистора VT8. Повышение потенциала
на затворе вызовет повышение проводимости канала полевого транзистора и
подключение мотора M2 к минусу источника питания. Мотор M2 начнёт
работать. Описанные процессы будут приводить к быстрому попеременному переключению моторов M1 и M2. На изменение соотношения длительности включения моторов влияют частотозадающие цепи цепи VT2C1R3 и VT3C2R5. Изменение тока в любой из них приведёт к немедленному изменению режима работы обоих моторов. |
Если на одном моторе длительность импульса увеличивается, то для другого пропорционально уменьшается. Соответственно если один из фототранзисторов при движении робота по трассе оказывается расположенным над чёрным участком, то происходит снижение длительности импульса на одном из моторов. Робот начинает поворачивать тем мотором у которого в данный момент через обмотку течёт больший ток, то есть больше длительность импульсов на его контактах. Если оба фототранзистора освещены одинаково, то частота и длительность импульсов на обоих выходах мультивибратора одинакова. Переключающиеся в противофазе транзисторы усилителей тока будут попеременно переключать моторы. При этом через оба мотора потечёт одинаковый ток. Робот поедет вперёд.

5.ИНСТРУКЦИЯ ПО СБОРКЕ.
1.Изготовление печатной платы.
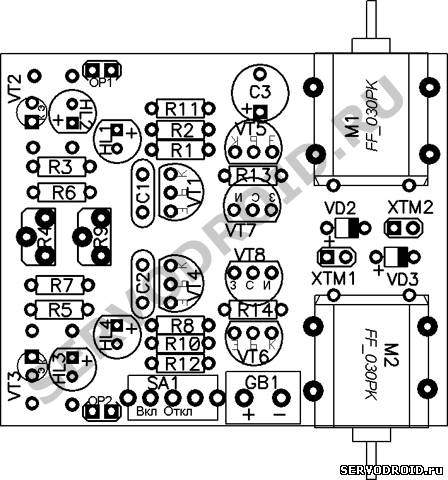
Рис.2.Монтажный чертёж. Нажать фото для увеличения.
2.Монтаж радиокомпонентов.

фото.5.Нажмите фото для просмотра в полном размере
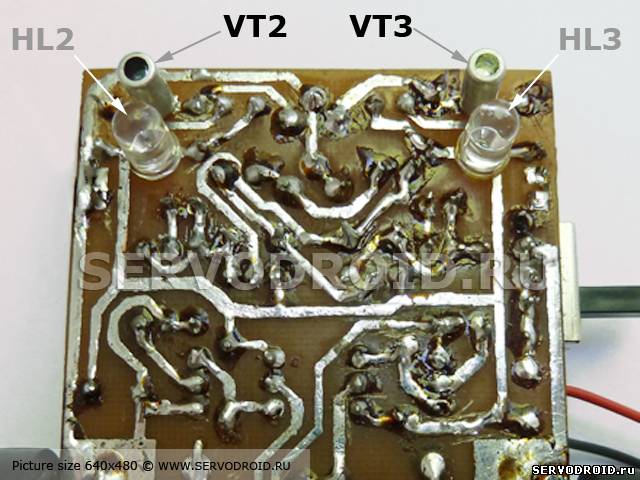
фото.6.Нажмите фото для просмотра в полном размере
В качестве передних опор используются две половинки от металлической скрепки. Металлическую скрепку разрезают кусачками пополам и устанавливают половинки в передней части печатной платы (позиции OP1,OP2) слева и справа (фото.7). Высота обоих передних опор не должна превышать 10мм. Затем концы скрепки запаивают, используя нейтральный беспромывочный флюс для облегчения пайки. После монтажа передних опор при движении робот будет опираться на них. Передние опоры должны иметь длину превышающую длину корпуса фототранзистора и светодиода не менее чем на 3-4мм (фото.8). Это необходимо для нормального приёма отражённого от поверхности инфракрасного излучения.
 фото.7. | 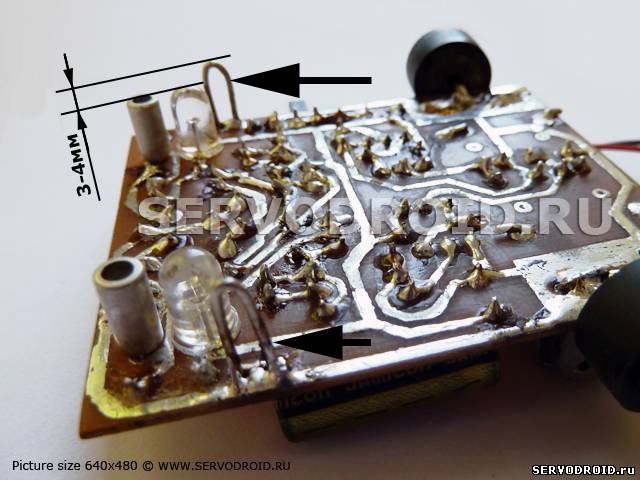 фото.8. |
Для крепежа двигателей к печатной плате используют канцелярские скрепки. Один мотор фиксируется двумя канцелярскими скрепками. Скрепки предварительно разгибают в пруток, а затем формируют с помощью монтажных плоскогубцев П-образную скобу. Перед тем как установить моторы вырежьте и приклейте на их позиции прямоугольники из двухстороннего тонкого скотча.
Установите моторы на позиции закрепите П-образными скрепками (6), которые необходимо паять со стороны токоведущих дорожек. После закрепления скобами моторы будут надёжно зафиксированы на позициях (фото.11, фото.12, фото.14).
5.Изготовление и монтаж осевой подвески.
В качестве колеса используется ролик диаметром 12мм, который необходимо закрепить. Для сборки осевой подвески вам потребуются: кнопки канцелярские силовые с пластмассовой ручкой и две канцелярские металлические скрепки. Не нарушайте последовательность сборки так как это важно!
1. Возьмите канцелярскую кнопку (не путать со скрепкой!) и залудите припоем острый металлический край канцелярской кнопки. Сделать это
лучше, используя нейтральный флюс и по возможности быстрее. В противном случае
вы рискуете проплавить место
контакта с рукояткой и деформацию рукоятки.
2. Отпилите часть ручки у канцелярской кнопки, как показано на
фотографии. Торец (место отпила) обработайте напильником, и отрежьте пластмассовую рукоятку Линия обреза пластмассовой ручки показана жёлтой линией (фото.10).
3. На ось из канцелярской кнопки оденьте резиновый ролик диаметром 12мм, который будет выполнять функции колеса.
нажимайте фото для просмотра в полном размере
 фото.9. |  фото.10. |
После сборки осевая подвеска будет состоять из: резинового ролика нанизанного на канцелярскую кнопку. После сборки установите осевую подвеску на позицию со стороны токоведущих дорожек. Расположите колесо точно под валом мотора. Оденьте на вал мотора протектор, например резиновый колпачок от нового гелиевого стержня или просто трубочку. Припаяйте подвеску за край(5) небольшим количеством припоя за край со стороны токоведущих дорожек (фото.13).
Проверьте ролик на качество хода, вращение. Он должен вращаться свободно и вместе с тем не должен болтаться в диагональных направлениях. Иначе говоря, при вращении ролика не должно быть эффекта "восьмёрки” как у велосипеда. После такой настройки зафиксируйте ролик большим количеством припоя.
Обозначения на фото.11, фото.12, фото.13 1-мотор (FF-030PK), 2-трубочка (нипель от велосипеда), 3-ролик (диаметром 12мм), 4-кнопка канцелярская (импортная),5-место пайки осевой подвески, 6-"П"-образные скрепки для крепежа моторов.
нажимайте фото для просмотра в полном размере
 фото.11. | 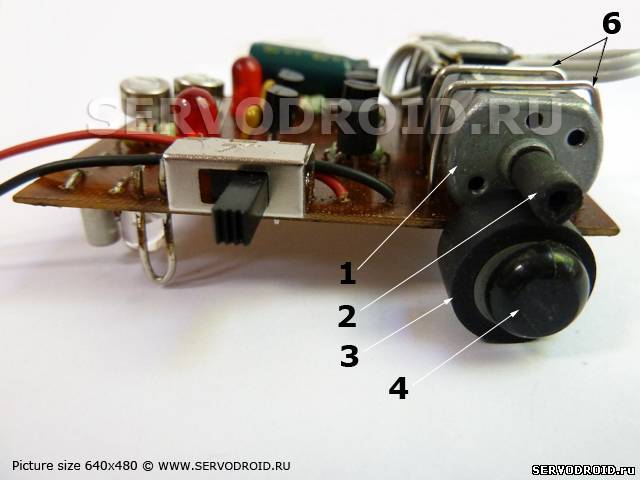 фото.12. |
нажимайте фото для просмотра в полном размере
 фото.13. | 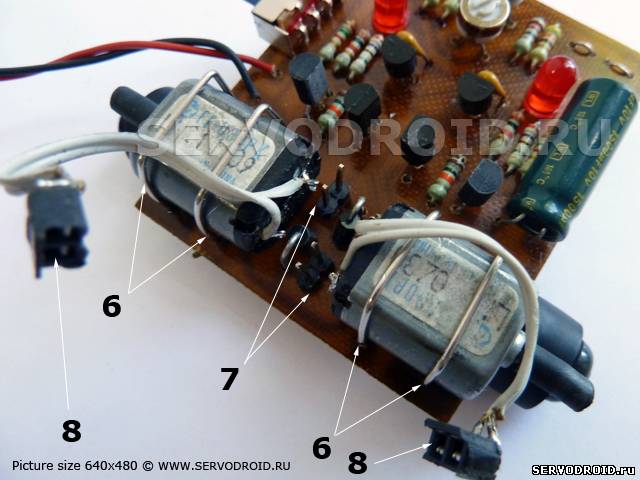 фото.14. |
Наклейте прямоугольную полоску из двустороннего скотча на нижнюю поверхность двухсекционного футляра (фото.15). Прикрепите двухсекционный футляр к моторам. Двусторонний скотч "держит" достаточно крепко, поэтому в дополнительных элементах крепежа нет необходимости (фото.16).
нажимайте фото для просмотра в полном размере
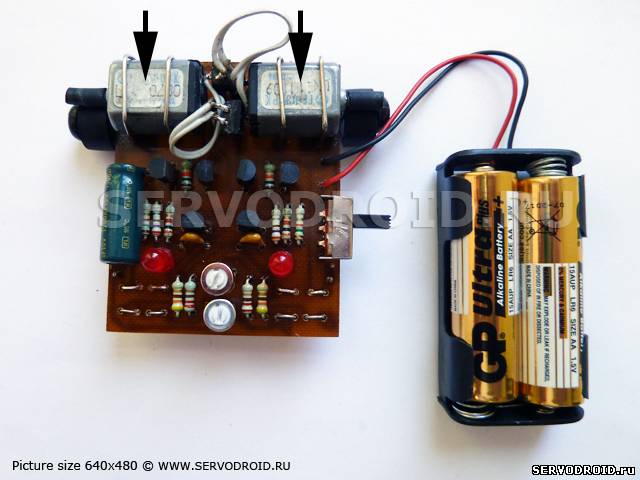 фото.15. |  фото.16. |
6.НАСТРОЙКА РОБОТА.
1. Со стороны токоведущих дорожек не должно быть замыканий припоем или не пропаянных выводов радиокомпонентов. Переверните плату и осмотрите её со стороны деталей. Проверьте правильность монтажа: всех транзисторов, конденсаторов и микросхем.
2. В качестве источника питания используйте только "свежие" гальванические элементы (батарейки) или хорошо заряженные аккумуляторы.
3. Если робот не включается или работает неправильно, съезжает с линии, то проведите проверку монтажа фототранзисторов и ик-светодиодов. Чтобы проверить фототранзисторы (позиции VT2,VT3) нужно замкнуть их выводы резистором на 1кОм - это будет равносильно освещению с помощью фонарика. Если один из фототранзисторов запаян неверно, то при подключении резистора схема заработает. Проверить инфракрасные светодиоды (позиции HL2,HL3) можно с помощью фотокамеры сотового телефона или цифрового фотоаппарата. Эти приборы очень хорошо "видят” инфракрасное излучение и вам останется только навести объектив на включенный инфракрасный светодиод. На жк-экране сотового телефона будет хорошо видно свечение беловатого цвета исходящее от светодиода. Яркость свечения этого светодиода определяется подстроечным резистором R9.
4. Скорость передвижения робота по трассе напрямую зависит от качества изготовленного привода. Поэтому добейтесь лучшей работы этого узла, а именно передачи вращающего момента с вала мотора на колесо. Вал мотора не должен слишком сильно прижимать колесо и не должен также еле касаться, необходимо добиться приблизительно средних показателей.
2. Регулятор яркости подсветки трассы установите на минимальное значение (подстроечный резистор R9). Добейтесь, чтобы инфракрасные светодиоды HL2,HL3 светили тускло. Визуально проконтролируйте свечение с помощью цифрового фотоаппарата. Прибавляйте яркость свечения для уверенного приёма отражённого излучения фототранзисторами VT2,VT3.

фото.17.Нажмите фото для просмотра в полном размере
Скачать архив Трасса для соревнований lineTracer
| Всего комментариев: 0 | |