Главная »
2010 » Июнь » 23 » МОДЕРНИЗИРУЕМ HEX BUG
23:48 МОДЕРНИЗИРУЕМ HEX BUG |

Автору этой статьи посчастливилось приобрести небольшого размером с
ладошку робота HexBug. Стоимость жучка в обычном магазине оказалась на порядок выше, чем в
интернете. Поэтому при повторении рекомендую покупать через интернет.
Отличительной чертой робота является
способ передвижения, он ходит с помощью шести маленьких ножек
расположенных на корпусе-брюшке. Сразу после включения питания жучок
приходит в движение и передвигается в направлении вперёд с небольшим
заворотом в сторону.
После проведения теста выяснилось, что он движется вперёд по дуге.
Сзади брюшка расположен микрофон, поэтому по хлопку жучок начинает
двигаться назад с разворотом. Тоже происходит и при контакте одного из
усиков с любым препятствием. Изучив детальную оснастку, я сильно
удивился экономности авторов этого изделия, так как внутри был
установлен всего один мотор.
|
На фото.1 показан жучок hex bug до модернизации. На фото.2 показан hex bug после модернизации.
нажимайте фото для просмотра в полном размере
фото.1
|
фото.2 |
Электронная часть схемы выполнена на элементах для поверхностного
монтажа и состоит из простейшего микрофонного усилителя, электронных
ключей и драйвера мотора. Все активные элементы - транзисторы! Конечно,
без конца хлопать, чтобы повернуть жучка от препятствия мне показалось
совсем неудобным, тем более что хлопать нужно очень сильно. Оказалось,
что жучок туг на ухо и слышит только очень громкие хлопки. Наверное,
авторы проекта таким образом защитили его "мозг" от ложных реакции на
помехи при движении по поверхности.
Учитывая эти обстоятельства, а так же при той цене, которая была уплачена за жучка хотелось немного большего и я решился провести несложную модернизацию HexBug. после незначительной переделки жучок будет по команде с любого пульта (или любой кнопки) поворачивать назад с разворотом. Иначе говоря, он будет делать тоже, что и раньше, но не по хлопку в ладоши, а по нажатию кнопки любого пульта дистанционного управления. Ещё в конструкцию добавляется светодиод, который зажигается на полную яркость при активации команды на поворот и светит столько, сколько будет длится поворот . Светодиод является необязательным элементом и устанавливается в декоративных целях!
ВНИМАНИЕ!
Переделка жучка -это процесс, требующий внимания и навыков работы с паяльником, если
вы не уверены в своих силах, лучше его не проводить. В случае неосторожных
или неправильных действий вы внесёте в схему дефект, и жучок будет работать не
полностью или вообще не будет работать!
1.ВИДЕОТЕСТ РОБОТА "HexBUG"
На видео.1 показано движение и управление с помощью ПДУ
модернизированного HexBug. На видео робот с установленным фоторезонансным модулем и сигнальным светодиодом. Если
светодиод ярко загорается, значит, в этот момент нажата кнопка пульта
управления (любой пульт). Эту команду робот воспринимает как движение
назад с поворотом. Такая же точно реакция будет при столкновении с
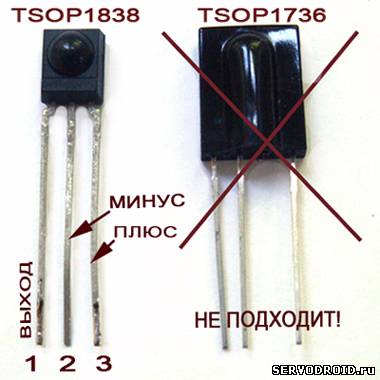
предметом активации одного или обоих датчиков касания (усиков). Как уже отмечалось выше в конструкцию жучка можно установить резонансный
фотоприёмник TSOP1838 и так же добавить светодиод. После всех переделок
потребление тока роботом возрастёт, поэтому если вас это не устраивает
светодиод не устанавливайте!
Видео.12.МОДЕРНИЗАЦИЯ HexBUG!
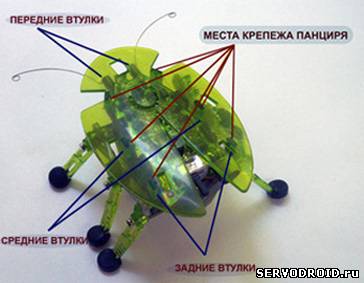
Первая задача: снять панцирь с брюшка жучка. Для этого найдите шесть мест крепления панциря два спереди, два сзади и два расположены по центру(фото.3). Это крепёжные втулки, расположенные под панцирем. Крепёжные втулки спереди и сзади, как правило, склеены, сбоку возможно нет. Поэтому очень осторожно постарайтесь разъединить (воспользуйтесь инструментом) две передних и две задних крепёжных втулки. Только после этого возможно сныть верхнюю крышку-панцирь. Причём панцирь должен после проделанных операций легко сниматься без печатной платы. На фотографии внизу слева показаны места расположений крепёжных втулок. На фото.4 робот без панциря, помечена позиция установки микрофона.
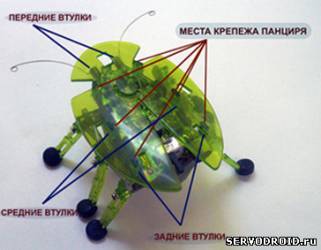
фото.3
|
фото.4 |
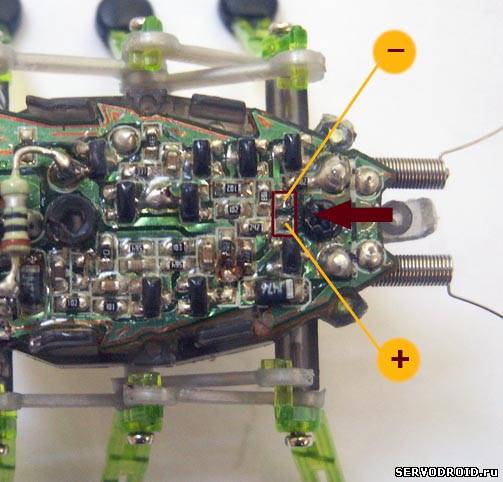
На фото.6 показана печатная плата жучка (увеличено). Стрелками указаны точки подключения источника питания к печатной плате и выходного сигнала с микрофона. Именно к этим трём точкам и нужно будет припаять выводы фотомодуля tsop1838. На фото.7 показана печатная плата жучка после демонтажа микрофона. Процесс демонтажа (отпайки) микрофона должен производиться как можно быстрее, для этого обязательно воспользуйтесь инструментом.

фото.6
|
фото.7 |
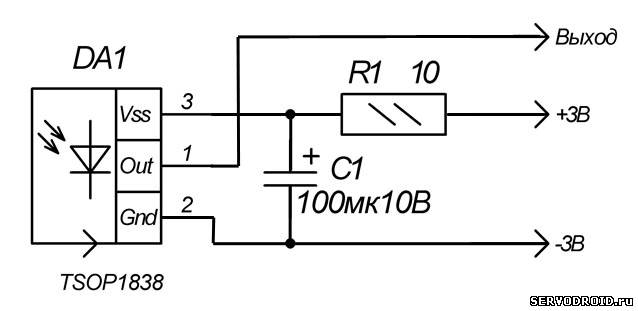
При работе мотора по питающей шине на вход фотомодуля tsop1838 могут проникнуть высокочастотные помехи работающего мотора, вызывая сбои. Такое же негативное воздействие могут оказывать пульсации тока во время передвижения жучка. Эти пульсации возникают в результате переменных нагрузок на валу мотора. Не забывайте, жучок не ездит, а ходит, отсюда и пульсации! Чтобы защитить фотомодуль от помех используется простейший фильтр установленный по питанию. Фильтр состоит из конденсатора ёмкостью от 47 мкФ до 100мкф (рабочее напряжение 10в) и резистора сопротивлением 10 Ом. Об этом будет сказано в дальнейшем.
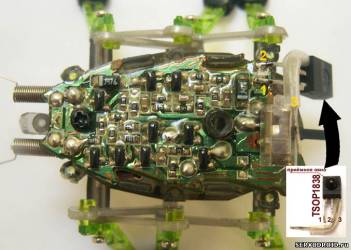
фото.8
|
фото.9 |
Укоротите и припаяйте выводы 1 и 2 (помечены на фото.8 жёлтым цветом) фотомодуля на показанные позиции. На вывод 3 фотомодуля оденьте кембрик-трубку и пока не припаивайте. Трубочка защитит вывод фотомодуля при монтаже от короткого замыкания с другими участками конструкции робота. Теперь к свободному выводу 3 фотомодуля припаяйте вывод резистора сопротивлением 10 Ом и мощностью 0,125Вт. Второй вывод резистора припаяйте к плюсу источника питания (показано на фото .9). Резистор нужно разместить как можно ближе к поверхности печатной платы. Не забывайте, что в последствии придётся обратно устанавливать панцирь-крышку. Если при монтаже радиокомпонентов, вы установите их неудачно, тогда установить на место панцирь будет весьма проблематично. Проверьте ещё раз правильность напайки выводов фотомодуля, так как неверное включение приведёт к его порче.
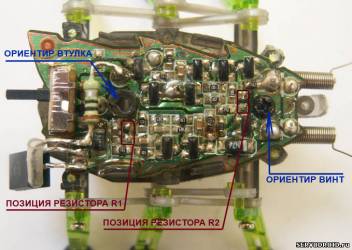 фото.10.
фото.10.
Обратите внимание, все радиокомпоненты робота выполнены по smd-технологии, то есть для поверхностного монтажа. Теперь самый сложный этап. Вам необходимо выполнить демонтаж (выпаять) резистор обозначенного буквенным индексов R1 (на фото.10). Этот резистор маркируется цифрами 102 на корпусе, что означает 1кОм. Схемотехнически резистор подключает питание на микрофон, который вы демонтировали. Это означает, что импульсные помехи беспрепятственно пройдут на вход схемы и смешаются с полезным сигналом от фотомодуля. Именно поэтому его нужно аккуратно выпаять. Для этого пользуйтесь паяльником не более 25Вт и заточите жало паяльника. Прогревайте сразу оба контактных места резистора, сдвигая его чуть сторону, затем быстро подхватите пинцетом. На фотографии приведённой выше показано расположение резистора R1. Рядом расположена втулка, для ориентации она помечена стрелочкой.
ВНИМАНИЕ! Если вы не планируете устанавливать светодиод, то резистор помеченный буквенным индексом R2 выпаивать нельзя!
Если вы решили подключать сигнальный светодиод, то найдите на фотографии второй резистор R2 (на фотографии верху уже выпаян). Этот резистор маркируется цифрами 242 на корпусе, что означает 2,4кОм. Выпаивайте резистор R2 и на его место запаяйте светодиод. При экспериментальном подключении использовался светодиод красного цвета свечения в корпусе диаметром 3мм. Но устанавливая такой светодиод вы можете повредить токоведущие дорожки, поэтому рекомендую выполнить монтаж с использованием светодиода красного цвета свечения для поверхностного монтажа в корпусе типоразмера 0805. Это будет лучший вариант, как по экономичности, так и по надёжности монтажа.
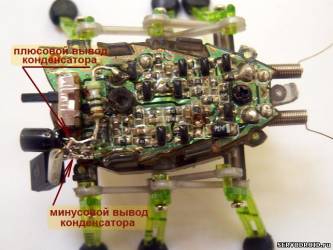
фото.11
|
фото.12 |
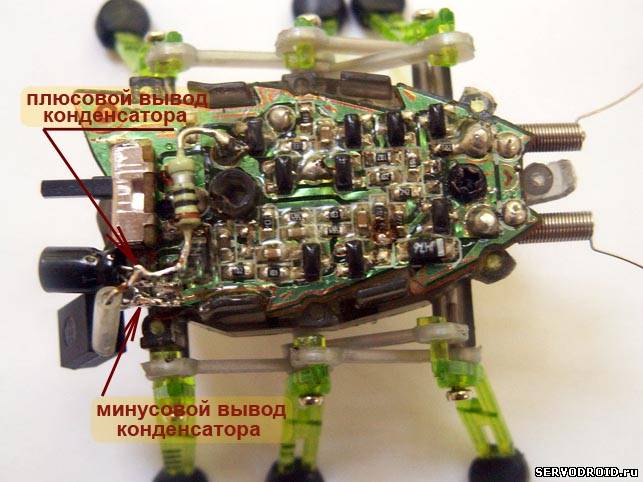
Выполните подключение конденсатора ёмкостью от 47мкФ до 100мкФ. Ёмкость можно подобрать экспериментально исходя из качества работы фотомодуля. В авторском варианте был установлен конденсатор ёмкостью 100мкФ10в. На фото.11 показана позиция для установки конденсатора. Выводы конденсатора следует укоротить. К сожалению даже с высокой детализацией не очень хорошо видны выводы конденсатора. Но подключение конденсатора не должно вызывать проблем. Подключайте конденсатор следующим образом: минусовой вывод конденсатора к минусовому выводу (вывод 2) фотомодуля. Плюсовой вывод конденсатора к плюсовому выводу фотомодуля (вывод 3). Физически корпус конденсатора должен быть расположен рядом с фотомодулем tsop1838. В модель робота лучше устанавливать импортные малогабаритные конденсаторы. На фото.12 показана принципиальная электрическая схема подключения фотомодуля.
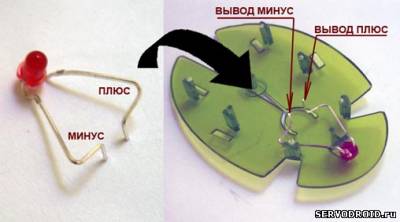 фото.13.
фото.13.
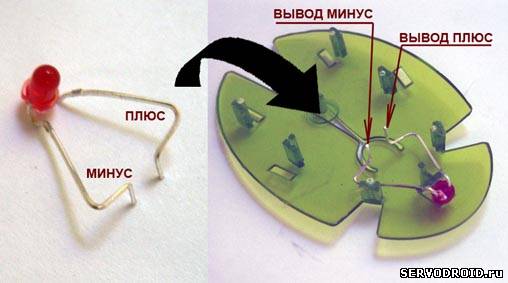
Не лишним будет напомнить, что установка светодиода не обязательна. Если вы всё же решили установить светодиод, то желательно выбрать в корпусе для поверхностного монтажа типоразмера 0805. Если вы ходите устанавливать светодиод в корпусе для навесного монтажа, то необходимо сформировать его выводы. Выгибайте выводы светодиода, так как показано на фото.13 слева. Добейтесь того, чтобы светодиод был точно установлен, так как показано на фото.13 справа. На панцире-крышке в передней части есть отверстие, в котором вы должны установить светодиод.
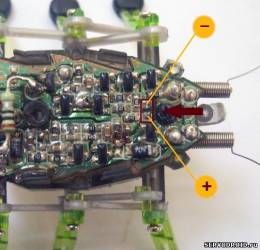
фото.14
|
фото.15 |
Установку и монтаж светодиода проводите на указанные красной стрелкой позиции, с учётом полярности подключения (фото .14). После монтажа светодиода (фото.15) область (выводы светодиода к печатной плате) помеченую стрелкой необходимо залить термоклеем. Для чего это нужно? Во время заключительной установки (на место) панциря-крышки, выводы светодиода будут испытывать значительную нагрузку и оторвут токоведёщие площадки от печатной платы!
На заключительном этапе, прежде чем устанавливать панцирь-крышку на место протестируйте жучка. Если он реагирует на команду с ПДУ, то можете переходить к установке крышки. Иначе проверьте правильность монтажа, воспользовавшись инструкциями вверху.
Не забудьте установить "свежие" батарейки в отсек, так как низкое напряжение питания tsop-модуля может приводить к его неустойчивой работе выражающейся в появлении ложных импульсов на сигнальном выходе. Установите крышку-панцирь на место, если прижимного фактора стоек крышки недостаточно, промажьте клеем стойки и подождите до полного высыхания. Теперь можно запустить переделанного жучка (фото.17,фото.18).
Модернизация HexBug закончена!
Если у ВАС возникли вопросы пишите на форуме или в Online чат по робототехнике мы их обсудим!
автор Алексей
Высоковольтный
www.servodroid.ru
© Внимание! Полное либо частичное копирование материала без разрешения
администрации запрещено!