01:24 РЕТРоБОТ | |||||||||||||||||||
 РетроБот -это робот, в котором установлены самодельные фототранзисторы. Ретробот предельно прост и способен бегать за источником света. Простота конструкции, малое количество деталей, а также уверенная работоспособность с фототранзисторами изготовленными по нашим рекомендациям делает его легко повторяемым в домашних условиях. В качестве источника питания установлена всего одна батарейка типоразмера "AA" напряжением 1,5 вольта. Схемотехническое решение допускает увеличение напряжения до 3-4,5 вольта, что приведёт к увеличению скорости передвижения по поверхности.$CUT$ Описание по изготовлению фототранзисторов можно найти на нашем сайте, для этого перейдите по ссылке здесь
***
На приведённых видеофрагментах (плейлист в проигрывателе) последовательно показано управление лучом света от фонаря. Через панель навигации видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель навигации доступна после запуска видео, справа внизу значок пиктограммы. Перед запуском каждого видеофрагмента автоматически выводится его название в верхнем левом углу. В нижней части окна проигрывателя слева название плейлиста и количество сгруппированных видеофрагментов.
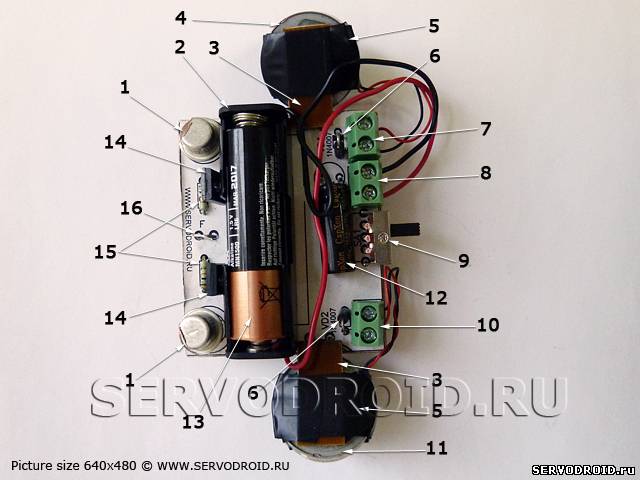
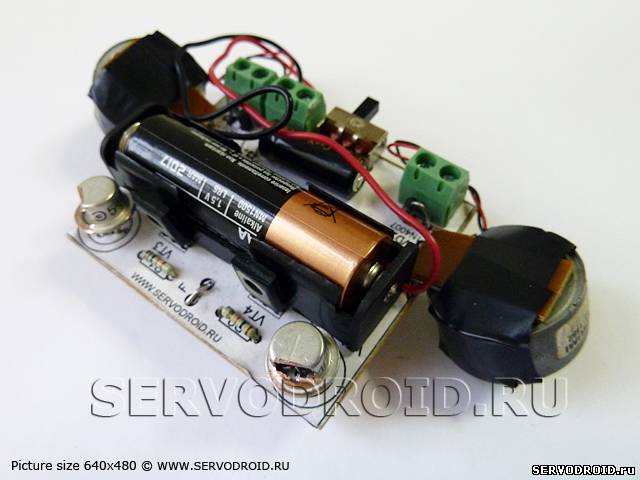
2.ХАРАКТЕРИСТИКИ И ФУНКЦИОНАЛЬНОСТЬ. На фото.1(вид спереди) и фото.2(вид сбоку) показан ретробот в сборке.
нажимайте фото для просмотра в полном размере
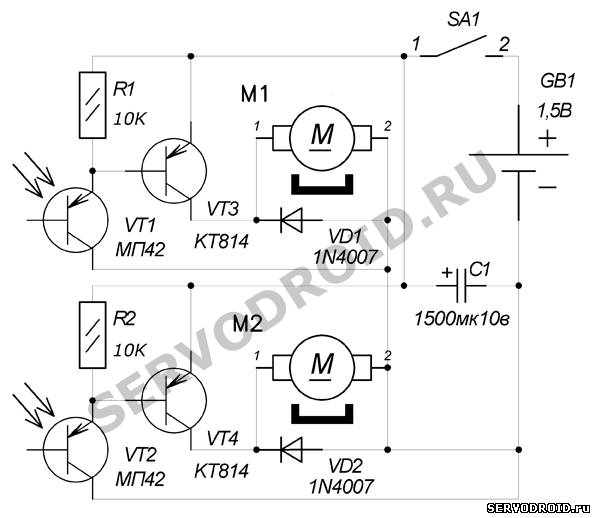
ПРИМЕЧАНИЕ.1. Цвет свечения светодиода не имеет значения, так как светодиод используется в качестве передней опоры. ПРИМЕЧАНИЕ.2. Разъёмы (клеммники винтовые) устанавливать необязательно, можно паять выводы моторов непосредственно на печатную плату. 3.ПРИНЦИП РАБОТЫ. Электрическая схема показана на рис.1. Сразу после включения питания, если уровень освещения в помещении недостаточен робот останется стоять на месте. Если осветить фототранзисторы, допустим с помощью фонарика, то робот придёт в движение.
3.ДЕТАЛИ И МАТЕРИАЛЫ. Печатная плата изготовлена из односторонне фольгированного листа стеклотекстолита толщиной 1-1,5мм. Размеры печатной платы 80х45мм. Ссылка на архив с чертежами и разводкой под ЛУТ размещена в конце статьи. Список радиокомпонентов приведён в таблице.1.
Все резисторы импортного или отечественного производства мощностью 0,125Вт. Оксидные (полярные) конденсаторы рекомендуется устанавливать малогабаритные. Источник питания (батарейка) установлена в односекционном футляре. В качестве протекторов на валы моторов для предотвращения проскальзывания одевают стандартные пластмассовые муфты. В качестве фототранзисторов используются самодельные, которые выполнены из германиевых транзисторов типа МП42. Описание по изготовлению фототранзисторов можно найти на нашем сайте, для этого перейдите по ссылке здесь Таблица.1.Список радиокомпонентов.
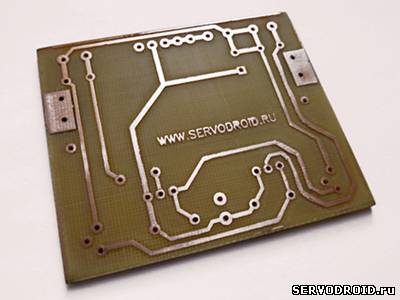
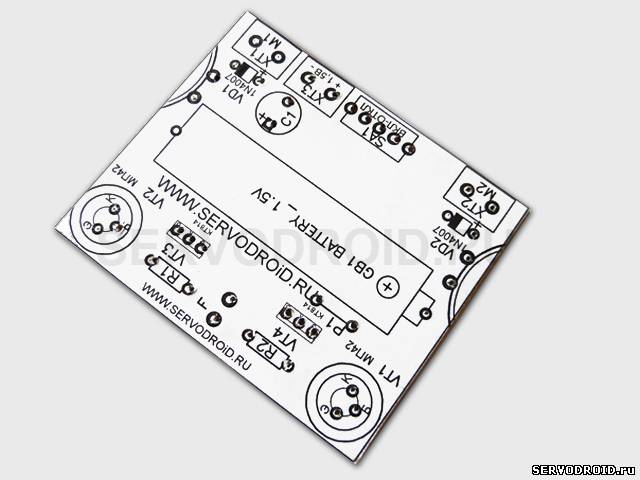
 4.ИНСТРУКЦИЯ ПО СБОРКЕ РОБОТА. Для правильной сборки придерживайтесь инструкций по сборке. Редактировать, масштабировать чертежи в архиве нельзя, так как все чертежи архива в точных размерах. 1.Изготовление печатной платы. Печатная плата (фото.4) выполняет функцию корпуса и основания для монтажа радиокомпонентов. Термоклише из архива, распечатайте на глянцевой бумаге. Изготовьте печатную плату по методу ЛУТ (лазерно-утюжный). После изготовления печатной платы выполните лужение токоведущих дорожек. Распечатайте сборочный (монтажный) чертёж (рис.2). Вырезайте его по контуру и наклейте используя сухой клеевой карандаш на поверхность изготовленной печатной платы, со стороны установки радиокомпонентов. На фото.5. показана печатная плата с наклеенным на поверхность чертежом монтажной платы. нажимайте фото для просмотра в полном размере
2.Монтаж радиокомпонентов.
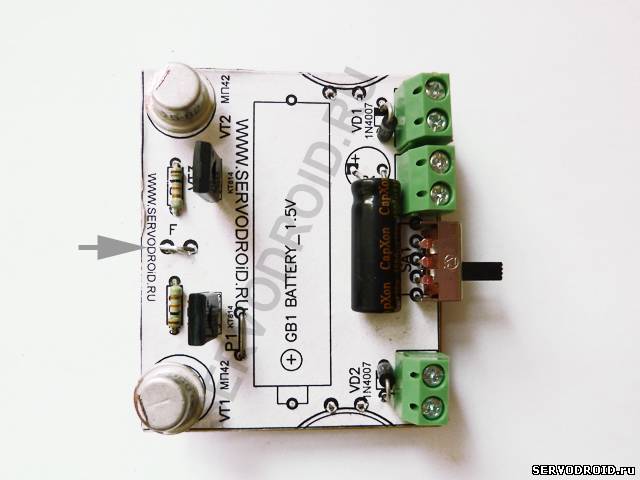
Выполните монтаж всех радиокомпонентов (фото.6) в соответствии с чертежом монтажной платы (рис.2) и списком радиокомпонентов в табл.1. Диоды VD1,VD2 устанавливайте на печатную плату вертикально. При отсутствии разъёмов (винтовых клеммников) их можно не напаивать. Но в этом случае вам придётся припаивать выводы от моторов и футляра батарейки непосредственно к печатной плате.  Фото.6.Нажимайте фото для увеличения.
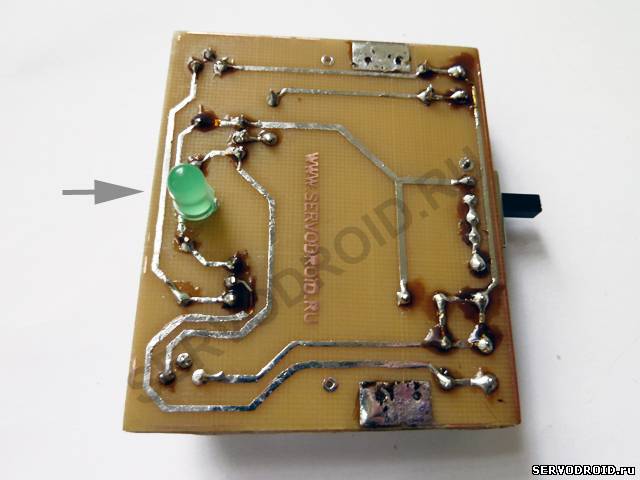
3.Монтаж передней опоры. В качестве передней опоры в конструкции робота установлен светодиод в корпусе диаметром 3мм. Корпус светодиода обладает достаточным скольжением. Его цвет свечения не имеет значения, так же не имеет значения исправен он или нет. Установите светодиод со стороны токоведущих дорожек (фото.7). Серая стрелка указывает на позицию светодиода. Корпус светодиода должен плотно прилегать к поверхности печатной платы. С противоположной стороны отрежьте и загните выводы светодиода, затем спаяйте их вместе (фото.8). нажимайте фото для просмотра в полном размере
4.Монтаж двигателей.
Крепление двигателей к поверхности печатной платы осуществляется через силовую раму. Для установки двух моторов вам потребуется изготовить две силовые рамы. Изготовьте силовую раму из двусторонне-фольгированного стеклотекстолита в форме прямоугольника(3) размером 10х25мм. Залудите прямоугольник из стеклотекстолита с одной стороны. Крепления для силовой рамы изготовьте из металлической канцелярской скрепки (фото.9). Разогните скрепку(1) и отрежьте её концы так, что бы получилась фигура в форме буквы "П"(2). Залудите концы скрепки удерживая её монтажными плоскогубцами. Припаяйте верхнюю часть скрепки к силовой раме(4) (фото.9). К поверхности силовой рамы прикрепите полоску двустороннего скотча. Это предотвратит проскальзывание корпуса мотора и будет его надёжно удерживать на позиции. Полоску скотча прикрепляют со стороны противоположной месте пайки скрепки, помечено серыми стрелками на фото.10. нажимайте фото для просмотра в полном размере
Установите собранную силовую раму с креплениями на позиции крепежа моторов (на фото.11 указывают серые стрелки). Для этого проденьте концы крепёжной скрепки в отверстия на печатной плате. Силовая рама должна быть установлена двусторонним скотчем вниз. Примотайте мотор изоляционной лентой к силовой раме. При намотке на каждом витке, в месте для вала проделывайте отверстие (фото.12). На фото.12 чёрная стрелка указывает на обмотку изоляционной лентой мотора, а светлая стрелка на место пайки силовой рамы к печатной плате. нажимайте фото для просмотра в полном размере
Сильными нажатиями прижимайте изоляционную ленту к корпусу мотора. Обрежьте область изоляционной ленты расположенную рядом с валом мотора (фото.13). Такой способ обмотки изоляционной лентой будет держать мотор, но для большей надёжности можно по цилиндрическому периметру корпуса мотора зафиксировать изоляционную ленту проволокой или другим способом. Для того чтобы робот передвигался быстрее (иначе будет очень медленно) на валы обоих моторов наденьте пластмассовые втулки (фото.14). Размеры и тип втулок придётся подобрать экспериментально. Но одевать большие колёса или ролики больших размеров при напряжении источника питания 1,5 вольта не рекомендую, робот не сдвинется с места! Так как усилие на валу мотора будет недостаточным для вращения. нажимайте фото для просмотра в полном размере
Если робот собран из исправных деталей и нет ошибок в монтаже, то при освещении ярким источником света фототранзисторов, робот придёт в движение (фото.15, фото.16). нажимайте фото для просмотра в полном размере
5.Модернизация робота. При разработке данного робота ставилась задача показать, возможность сборка робота из простых доступных радиокомпонентов. Поэтому его технические характеристики, например скорость передвижения или чувствительность к источнику света не лучшие. Повысить скорость передвижения и чувствительность одновременно, можно простым увеличением напряжения источника питания до 3 вольт. Для такой модернизации установите ребром двухсекционный футляр на позицию. Закрепите футляр строительным двусторонним скотчем. Батарейки рекомендуется брать с меньшим весом, например типоразмера "AAA" ("мизинчиковые") 1,5 в. Футляр для батареек должен иметь соответствующие габариты. Если вы установили две батареи с общим напряжением 3 вольта, то у вас появляться возможность произвести ещё одно небольшое улучшение конструкции. Вы сможете добавить световой эффект! В качестве опорного светодиода установите мигающий красного цвета свечения. В корпусе мигающего светодиода по цепи питания встроен токоограничительный резистор, поэтому его можно смело подключать монтажным проводом напрямую к батарейкам (3В). Сборка окончена!
В архиве: чертеж в точных размерах теромоклише и монтажный (сборочный) чертёж. Преобразовывать и редактировать чертежи нельзя! После скачивания распечатайте чертежи на лазерном принтере. Термоклише распечатайте на глянцевой бумаге. Используйте термоклише для перевода рисунка на стеклотекстолит по методу ЛУТ. Пароль не требуется. Скачать архив
Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим! автор Алексей Высоковольтный www.servodroid.ru © Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
| |||||||||||||||||||
|
| |||||||||||||||||||










| Всего комментариев: 8 | |
|
| |



