13:38 SUMO ДЛЯ НАЧИНАЮЩИХ | |||||||||||||||||||||||||||||||
 SUMO ДЛЯ НАЧИНАЮЩИХ - простой робот выполненный из доступных материалов. Роботизированные соревнования Sumo приобретают всё большую популярность в нашей стране. Для подготовленных и профессионалов процесс создания собственного робота как правило не вызывает затруднения. Но для начинающих, сборка робота для соревнований может стать непреодолимым препятствием.
Видеофрагменты 1-3
2.ХАРАКТЕРИСТИКИ И ФУНКЦИОНАЛЬНОСТЬ.
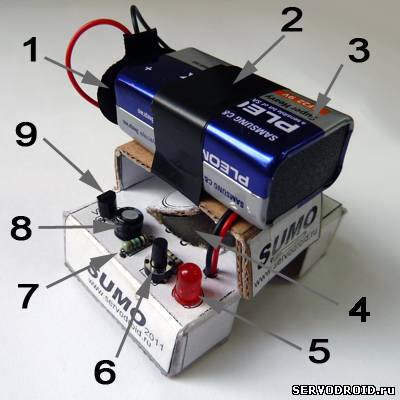
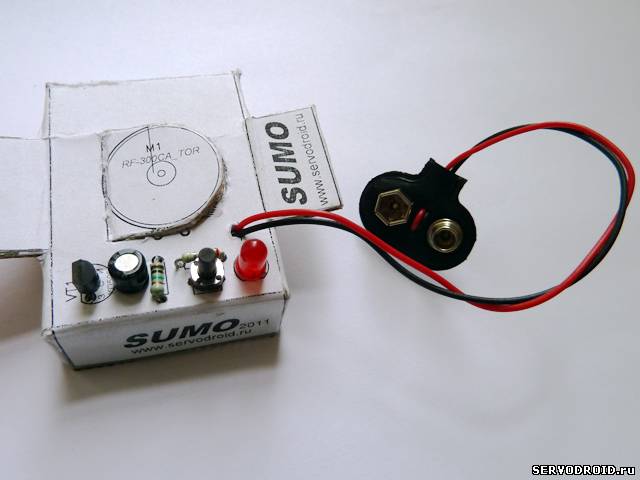
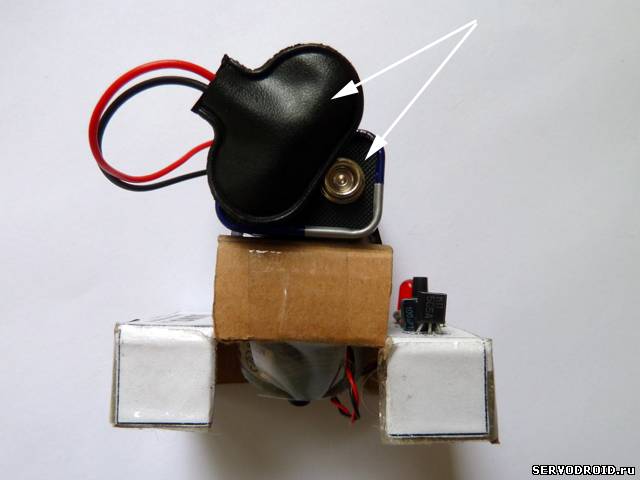
На фото.1, фото.2 показан робот Sumo в сборке.
3.ПРАВИЛА СОРЕВНОВАНИЙ.
Для робота Sumo изготовленного по приведённой технологии правила борьбы будут отличаться от общепринятых. Введение своих правил продиктовано конструктивными особенностями робота. Длительность поединка определяется в 20 секунд. По прошествии этого времени робот автоматически выключится и поединок нужно начинать снова. Перед поединком роботы устанавливают точно напротив друг друга на близкой дистанции. Активацию робота проводят коротким нажатием на кнопку. Победителем в поединке считается тот кто полностью вытолкнет соперника из круга. Если робот находится в круге любой частью, то он не считается побеждённым! Если оба робота вышли за пределы круга (полностью), то это ничья.
4.ПРИНЦИП РАБОТЫ.
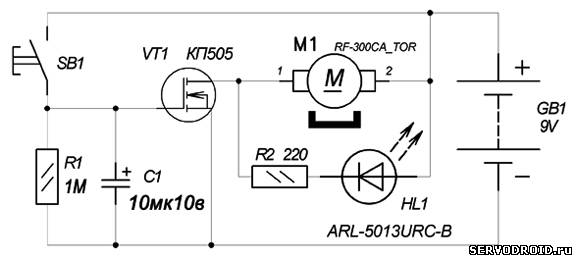
Электрическая схема представлена на рис.1. После включения источника питания робот находится в неподвижном состоянии. Отрицательный потенциал через резистор R1 поступает на затвор полевого транзистора VT1 и закрывает его. В закрытом состоянии сопротивление канала транзистора исток-сток бесконечно. Питание на левый (по схеме) вывод мотора M1 не поступает, вал мотора не вращается.
Если кратковременно нажать кнопку SB1 конденсатор C1 окажется подключенным к источнику питания и быстро зарядится до напряжения питания. Так как положительная обкладка конденсатора подключена непосредственно к затвору полевого транзистора, то при достижении порогового уровня включения полевой транзистор VT1 откроется. Сопротивление его канала сток-исток резко упадёт. Левый (по схеме) вывод мотора окажется подключенным через канал полевого транзистора к минусу источника питания. Так как правый (по схеме) вывод мотора M1 соединён непосредственно с плюсовым выводом источника питания цепь замкнётся. Через мотор потечёт ток и его вал начнёт вращаться. Робот придёт в движение. Одновременно питание поступит на светодиод HL1 через резистор R2. Этот резистор ограничивает допустимый ток через светодиод HL1 защищая от выхода из строя.
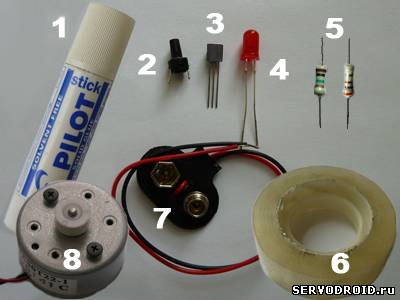
5.ДЕТАЛИ И МАТЕРИАЛЫ. Конструктивно робот полностью выполнен из картона. Прочность корпуса робота возрастает за счёт элементов крепежа. Все радиокомпоненты установлены на картоне и соединены с помощью своих выводов. В качестве ринга используется двухслойный диск из картона и плотной чёрной бумаги. Инструкция по сборке робота и ринга приводятся далее. На фото.4. показаны компоненты используемые для сборки робота Sumo.
6.ПОШАГОВАЯ ИНСТРУКЦИЯ СБОРКИ РОБОТА.
Для успешной сборки точно следуйте инструкциям. Сборка робота выполняется по шаблону, который нужно распечатать на принтере, о чём будет сказано далее..
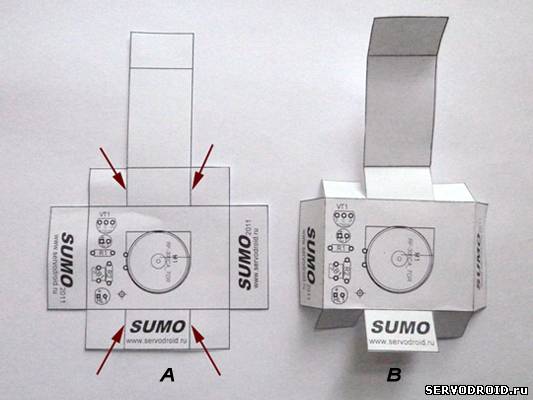
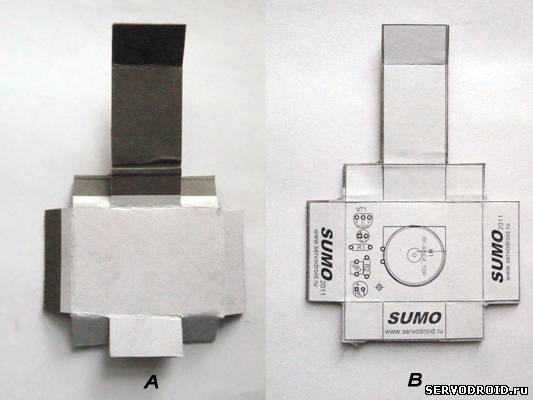
Скачайте шаблон, размещённый в конце страницы в виде архивного файла Шаблон выполнен в точных натуральных размерах. Распечатайте шаблон на листе офисной бумаги формата А4. Вырежьте шаблон по толстым линиям (фото.5,A). Выполните предварительные сгибы также ориентируясь по фото.5,B.
Шаг.1.Изготовление корпуса.
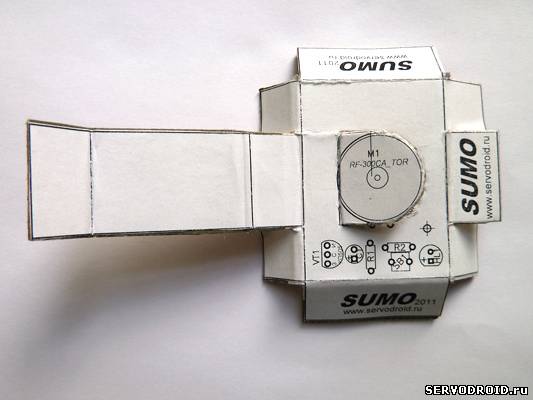
Для изготовления корпуса возьмите гофрокартон и с шаблона переведите контур карандашом. Вырезайте контур из картона ножницами. На фото.6,A показан корпус из гофрокартона вырезанный по шаблону (архив в конце статьи). Сухим клеем наклейте шаблон на картон фото.6,B.
нажимайте фото для просмотра в полном размере
После того, как шаблон приклеиться отогните боковые поверхности как показано на фото.7. В центре в месте отмеченном для установки мотора аккуратно вырезайте полукруг (фото.7,фото.8). Затем отогните его немного вверх.
нажимайте фото для просмотра в полном размере
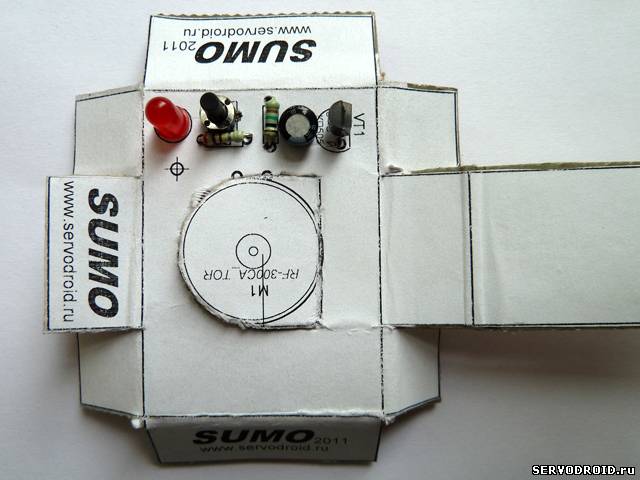
Шаг.2.Монтаж радиокомпонентов. На этом этапе необходимо выполнить установку всех радиокомпонентов на отмеченные позиции ориентируйтесь по фото.9 и фото.10. Для каждого радиокомпонента проделайте отверстия шилом точно по круглым отметкам. Чтобы радиокомпоненты не выпадали немного подогните их выводы. Ни в коем случае не укорачивайте выводы деталей, соединения между ними будут выполняться за счёт пайки этих выводов! Самое крупное отверстие необходимо проделать рядом со светодиодом обозначенное "прицелом". Через это отверстие будет проходить провод клипсы-разъёма.
нажимайте фото для просмотра в полном размере
Переверните тыльной стороной корпус робота (детали со стороны выводов) и начинайте выполнять соединения между выводами. Для этого воспользуйтесь фото.11 и фото.12. Позиции радиокомпонентов на фото.12 закрашены для облегчения монтажа. Дополнительно используйте электрическую схему на рис.1.
Отогните вывод затвора (З) транзистора VT1 (КП505) в сторону минусового вывода конденсатора. Припаяйте вывод затвора транзистора к минусовому выводу конденсатора С1. Так же к минусовому выводу конденсатора припаяйте один вывод резистора R1 (1Мом) и один вывод кнопки SB1. Ориентируйтесь по фото.12.
Далее, запаяйте вместе вывод истока (И) транзистора, плюсовой вывод конденсатора С1 и второй вывод резистора R1. Минусовой вывод мигающего светодиода HL1 припаивайте ко второму выводу кнопки SB1. А плюсовой вывод светодиода HL1 к рядом расположенному выводу резистора R2 (270 Ом).
Соединяем и запаиваем оставшиеся выводы. Вывод стока (С) транзистора VT1 соединяйте с левым выводом резистора R2 как на фото.13. Не лишним будет, если эти выводы вы изолируете изоляционной лентой.
нажимайте фото для просмотра в полном размере
нажимайте фото для просмотра в полном размере
нажимайте фото для просмотра в полном размере
Чтобы робот передвигался по прямой, необходимо соблюсти два условия: во-первых мотор необходимо установить под углом, во-вторых вал мотора не должен быть ниже нижней границы боковых поверхностей. Иначе говоря при установке робота на ровную поверхность он должен стоять на картонных боковых частях. А вал мотора с протектором должен соприкасаться с поверхностью.
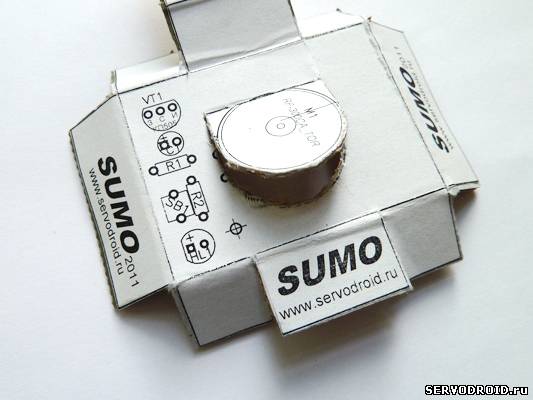
Для создания тяговых усилий вал мотора должен иметь хорошее сцепление с поверхностью для этих целей на вал необходимо одеть протектор. В качестве протектора используйте резиновый фиксатор от нового гелиевого стержня (им закрывают стержень со стороны пишущего узла чтобы не вытек). Стрелкой на фото.20 помечен протектор. Смажьте клеем полукруглую поверхность показанную белой стрелкой на фото.21. Для склеивания рекомендуется обыкновенный клей. Перед установкой двигателя необходимо выждать некоторое время. Подождите пока клей загустеет и станет кашеобразным. Если прислонить мотор сразу, то жидкий клей может проникнуть внутрь мотора, что приведёт к его порче!
нажимайте фото для просмотра в полном размере
нажимайте фото для просмотра в полном размере
 Фото.26. нажимайте фото для увеличения.. Шаг.6.Установка и подключение батарейки. Батарейка устанавливается на П-образную раму. Для крепежа батарейки на раме воспользуйтесь изоляционной лентой (фото.27). Робот конструктивно продуман так, что рама в центральной части снизу подпирается мотором и является одновременно для него амортизатором.
нажимайте фото для просмотра в полном размере
Шаг.7.Изготовление ринга. Для проведения соревнований-поединков изготовьте ринг. Ринг должен быть двухслойным, толщиной не менее 3мм. Если это условие не будет соблюдено робот не остановиться на краю ринга. Диаметр ринга 250мм. Первый нижний слой тонкий гофрокартон, второй верхний слой чёрный тонкий картон. Оба слоя склеивают при помощи клея и дают высохнуть. Когда ринг будет готов можно приступать к соревнованиям. СБОРКА ОКОНЧЕНА! Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим! автор Алексей Высоковольтный www.servodroid.ru © Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
| |||||||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||||||



















| Всего комментариев: 37 | |

| |













