15:23 ТАКТИЛЬНЫЙ РОБОТ | |||||||||||||||||||||||||||||
 Тактильный робот - это робот с установленными датчиками касания. На роботе представленном в статье установлено три датчика касания. Два впереди регистрируют столкновение с препятствиями с левой стороны, с правой стороны и по центру. Один датчик расположен сзади для предотвращения столкновений при движении назад.
***
1.ВИДЕОТЕСТЫ.
Через панель навигации видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель навигации доступна после запуска видео, справа внизу значок пиктограммы. Перед запуском каждого видеофрагмента автоматически выводится его название в верхнем левом углу. В нижней части окна проигрывателя слева название плейлиста и количество сгруппированных видеофрагментов.
Видеофрагменты 1-4 ВСЕ РОБОТЫ на канале SERVODROID!!! подпишись и смотри. Переход по ссылке жми!
2.ХАРАКТЕРИСТИКИ И ФУНКЦИОНАЛ РОБОТА
нажимайте фото для просмотра в полном размере
В качестве датчиков столкновения в конструкции используются микропереключатели с металлической лапкой, которые запаяны в горизонтальной ориентации со стороны токоведущих дорожек. Всего в конструкции установлено три датчика/микропереключателя, два впереди и один позади.
Алгоритм работы тактильных датчиков следующий. Столкновение с правым или левым датчиком отдельно вызывает отъезд назад и поворот в сторону. Затем движение вперёд возобновляется. Если робот во время движения задним ходом сталкивается с препятствием, то его движение назад прекращается и он меняет направление на движение вперёд.
Сигнальная система выполнена на двух светодиодах красного цвета свечения. Облегчает настройку или устранение неисправностей, сигнализирует о правильной работе схемы. При включении любого из датчиков расположенных впереди зажигаются оба светодиода. Регулировки угла поворота вправо-влево. Для изменения угла поворота на печатной плате установлено два подстроечных резистора. С их помощью можно независимо изменять угол поворота влево или вправо. Вращение движка (подвижной системы) подстроечного резистора на больший угол вызовет увеличение угла поворота, на меньший уменьшение. Напоминаю, что поворот происходит только после того как робот отъедет назад, то есть во вторую очередь. Следует также учесть, пр установленном малом повороте, робот на больших скоростях выполнит поворот на больший угол. Поэтому установки для углов поворота выполняют после установки скорости передвижения робота. Регулировка скорости передвижения по поверхности выполнена по фазово-импульсному методу. Регулировка выполняется вращением движка (подвижной системы) подстроечного резистора от минимальной, до максимальной. Рекомендуется приблизительно среднее положение. Стоит учитывать, что скорость передвижения будет напрямую зависеть от "свежести" установленных батареек!
Электрическая схема приведена на рис.1. После включения питания выключателем SA1 через защитный диод VD9 на микросхемы DD1,DA1,DA2 поступает питающее напряжение, около 6 вольт. Диод VD9 защищает микросхемы от неправильного (обратного) подключения источника питания. Так как диод VD9 Шоттки, то падение напряжения в прямом направлении минимально. 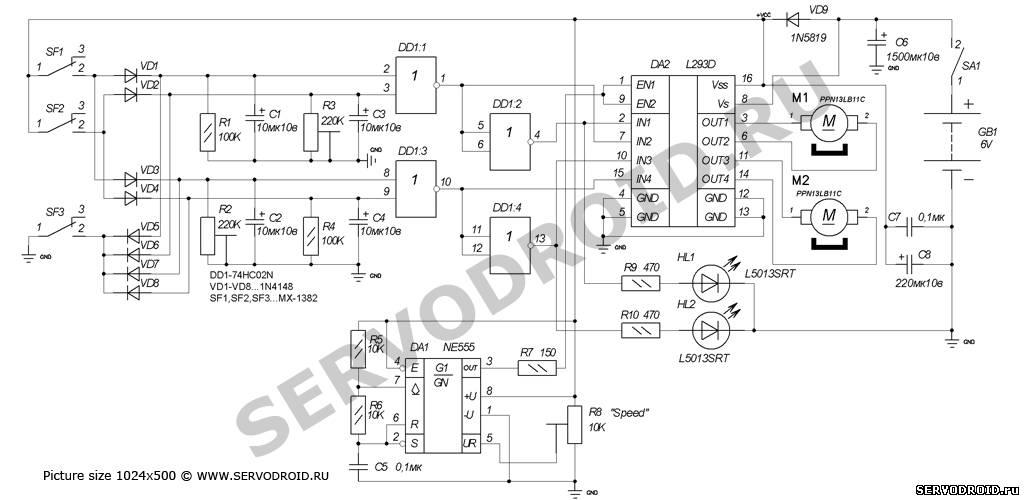 рис.1. Электрическая схема нажать для увеличения.
Левый по схеме вывод 1 микропереключателя SF1, подключен к положительному потенциалу источника питания GB1. Вывод 2 того же микропереключателя подключен через диод VD1 к входу 2 DD1.1 и через диод VD3 к входу 8 DD1.3. В момент когда микропереключатель SF1 сработает, его контакты 1 и 2 замкнуться. Через диоды VD1,VD3 положительный потенциал поступит на верхние по схеме обкладки конденсаторов C1,C2 и быстро зарядит их. Скорость зарядки этих конденсаторов определяется прямым сопротивлением диодов VD1,VD3, чем оно меньше , тем быстрее будут заряжаться конденсаторы.
Как только конденсаторы C1,C2 зарядятся, до напряжения чуть ниже напряжения питания на входе 2 элемента DD1.1, и входе 8 DD1.3 установиться высокий логический уровень. согласно логике работы элементов на их выходах 1 и 10 высокий логический уровень смениться на низкий. Элемент DD1.2 инвертирует этот входной сигнал и на его выходе окажется уже высокий логический уровень. Иначе говоря произошла смена логических уровней на выходах элементов DD1.1,DD1.2 на противоположные.
К выходам элементов DD1.2, DD1.4 через токоограничительные резисторы R9,R10 анодами подключены светодиоды HL1,HL2. Как только срабатывает любой из датчиков SF1,SF2 через светодиоды начинает протекать ток и они зажигаются. Они светятся пока заряд в одном из конденсаторов C1-C4 сохраняется. То есть пока выполняется алгоритм поворота.
Соответственно изменяться логические уровни на входах In1,In2 микросхемы-драйвера L293D. Направление вращения вала мотора M1 измениться на противоположное. Но время в течении которого будет присутствовать такое изменение непродолжительно. Потому что параллельно конденсатору C1 и C2 установлены резисторы R1,R2. Через эти резисторы конденсаторы будут разряжаться. Обратите внимание, на то, что один из резисторов R2 подстроечный, и его сопротивление можно изменять. Следовательно можно управлять временем разрядки конденсатора C2 и менять длительность в течении которого мотор M2 будет вращаться в противоположном направлении. Для мотора M1 при срабатывании только микропереключателя SF1 длительность работы будет определяться только парой из конденсатора C1 и резистора R1.
Но если при столкновении с препятствием переключиться SF2, то для мотора M1 можно установить длительность обратного вращения вала мотора с помощью подстроечного резистора R3. А для мотора M2 длительность обратного (реверсивного) вращения вала будет определяться парой из конденсатора C4 и резистора R4. Такая схема включения позволяет получать повороты в разные стороны при срабатывании датчиков SF1,SF2. Не трудно заметить, что срабатывание датчика SF3 приведёт к полной разрядке всех конденсаторов C1-C4 одновременно. Это равносильно исходному состоянию входных уровней для микросхемы DD1 при включении питания. Поэтому робот поедет вперёд. Для регулировки скорости передвижения задействованы специальные входы управления 1 и 9 микросхемы-драйвера L293D (DA2). На эти входы подаётся фазоимпульсный сигнал с выхода 3 микросхемы NE555 (DA1). Микросхема NE555 включена в режиме низкочастотного генератора с фазоимпульсной модуляцией. Изменение модулирующего напряжения на управляющем входе 5 осуществляется с помощью подстроечного резистора R8. При изменении модулирующего напряжения изменяется временное положение выходного импульса поступающего с выхода 3 микросхемы DA1 на входы управления 1 и 9 микросхемы DA2.
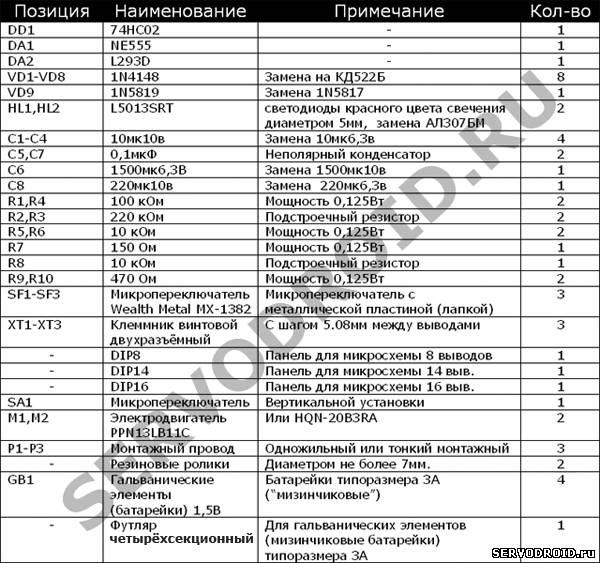
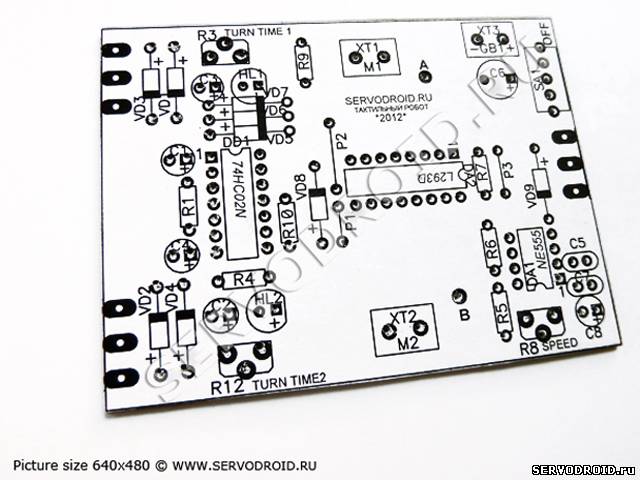
Печатная плата изготовлена из односторонне фольгированного листа стеклотекстолита толщиной 1-1,5мм. Размеры печатной платы 80х60мм. Ссылка на архив с чертежами и разводкой под ЛУТ генератора размещена в конце статьи. Список радиокомпонентов приведён в таблице.1.
Таблица.1.Список радиокомпонентов. Примечание.1. При замене импортных диодов 1N4148 на отечественные диоды КД521 или КД522 учитывайте, что у отечественных диодов чёрная полоска на корпусе -это анод(+). Тогда как у импортных чёрная полоска на корпусе катод(-). Поэтому в случае установки отечественных диодов их придётся запаивать наоборот!
Для правильной сборки придерживайтесь инструкций по сборке. Редактировать, масштабировать чертежи в архиве нельзя, так как все чертежи архива в точных размерах.
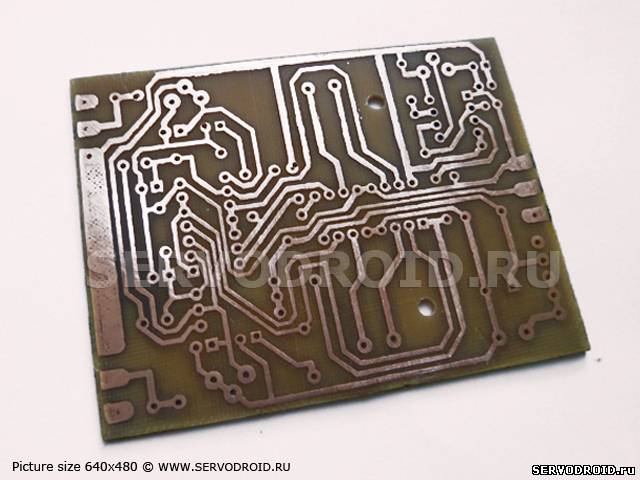
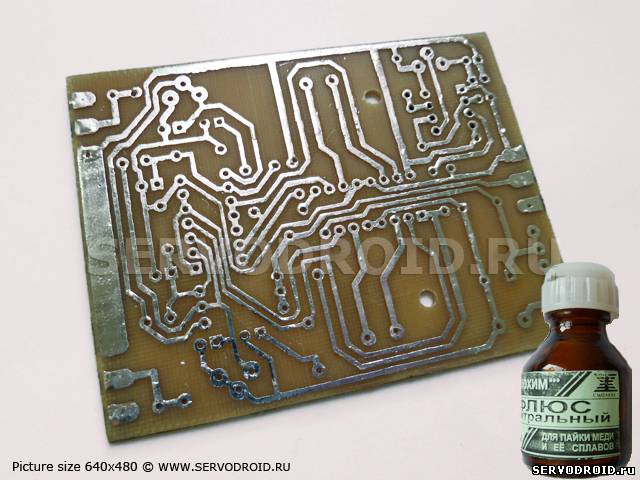
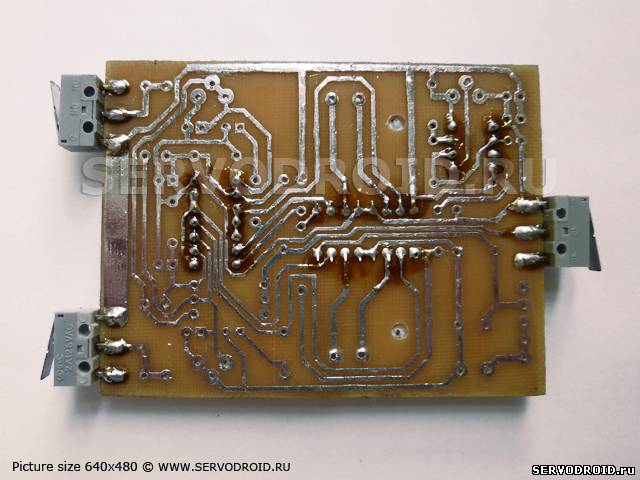
Подготовьте односторонний лист стеклотекстолита размерами 70x80мм. Предварительно зачистите фольгированную поверхность стеклотекстолита, промойте и высушите. Выполняйте перевод по известной методике ЛУТ, рисунка токоведущих дорожек. После изготовления печатной платы (фото.4) проверьте токоведущие дорожки на возможные замыкания. Затем проведите лужение токоведущих дорожек с целью улучшения проводимости и предотвращения коррозии (фото.5). Чтобы провести лужение быстро и без проблем покройте токоведущие дорожки нейтральным флюсом с помощью кисточки(фото.5).
нажимайте фото для просмотра в полном размере
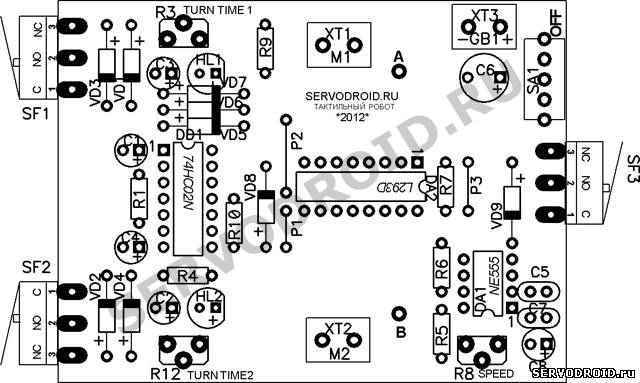
Распечатайте сборочный (монтажный) чертёж из архива и вырезайте ножницами по контуру (фото.6). Аккуратно проделайте отверстия на позициях всех радиокомпонентов. Наклейте на поверхность изготовленной печатной платы используя сухой клеевой карандаш так чтобы отверстия чертежа полностью совместились с отверстиями на печатной плате (фото.7).
нажимайте фото для просмотра в полном размере
Монтаж рекомендуется проводить в следующем порядке: панели под микросхемы, микропереключатели, резисторы, диоды, конденсаторы, светодиоды, выключатели питания, моторы, элементы крепежа и фурнитура. Обратите внимание на то, что некоторые из диодов устанавливают при монтаже на печатной плате в вертикальном положении. нажимайте фото для просмотра в полном размере
ПЕРЕМЫЧКИ. На монтажном чертеже показаны P1,P2,P3 - это перемычки. В качестве перемычек удобно использовать выводы от ненужных резисторов, конденсаторов.
На фото.10 показан полный монтаж всех радиокомпонентов. Обратите внимание на установку конденсатора C6 большой ёмкости. Его необходимо установить с некоторым запасом по длине выводов, для того чтобы согнуть выводы под углом 90° расположив корпус горизонтально.
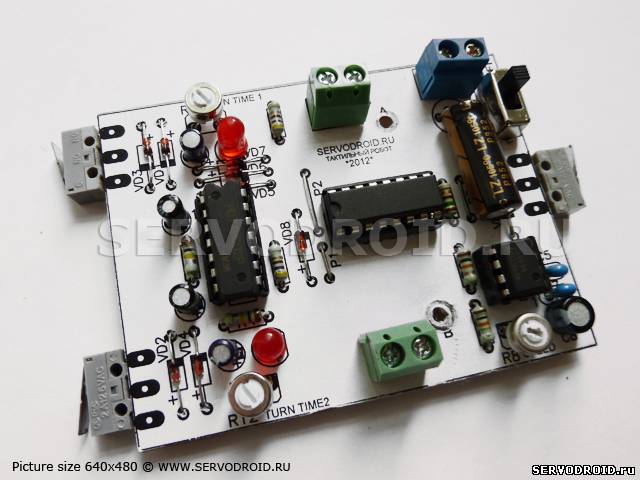 фото.10.Нажмите фото для просмотра в полном размере
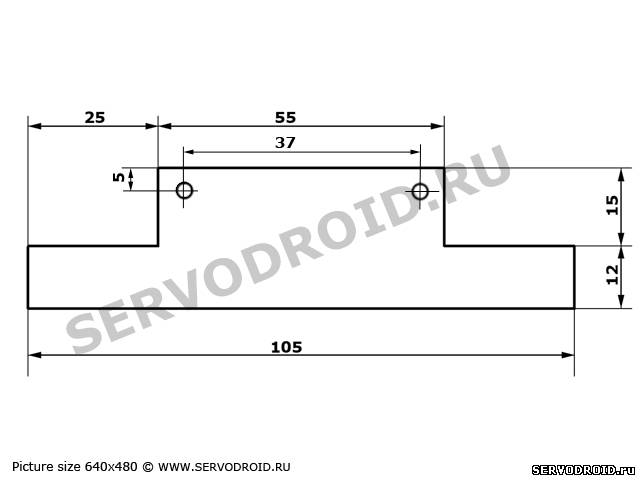
Для установки и крепежа моторов необходимо изготовить силовую раму. В качестве материала используется прозрачная пластиковая линейка с нанесёнными делениями до 20см и шириной 26мм. Переведите чертёж показанный на рис.2 на поверхность линейки, отрежьте лишние части с помощью ножовки по металлу. Просверлите два отверстия диаметром не менее 3мм. Расстояние между отверстиями должно быть равно расстоянию между отверстиями в батарейном отсеке.
нажимайте фото для просмотра в полном размере
Теперь необходимо согнуть "крылья" (фото.12). Сделать это можно над жалом разогретого паяльника. Область сгиба показана пунктиром (фото.12). Приблизьте к жалу паяльника указанные пунктиром участки, на расстояние не более 2-3мм. Постарайтесь не касаться жала паяльника иначе произойдёт мгновенное плавление линейки. Плавно сгибайте "крылья" по мере разогрева указанных участков. Доведите угол сгиба до 45° (фото.13).
нажимайте фото для просмотра в полном размере
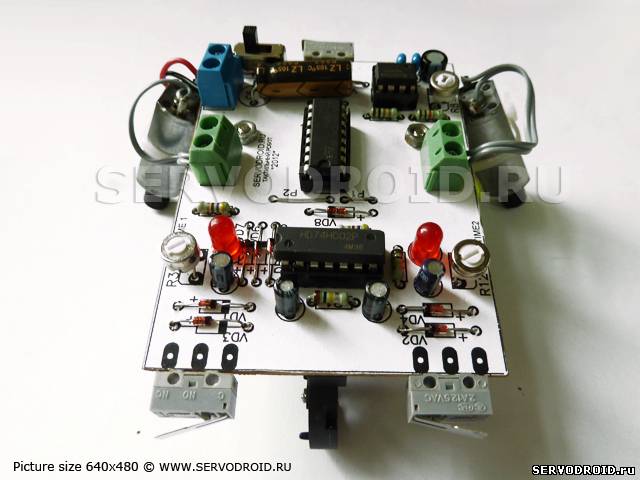
Подготовьте два мотора PPN13LB11C и резиновые ролики диаметром 7мм (фото.14). Установите ролики на валы обоих моторов. Ролики диаметром более 7мм устанавливать не рекомендуется, возрастёт нагрузка на вал мотора, сложнее будет подстроить минимальную скорость передвижения.
Перед тем как устанавливать моторы на силовую раму прикрепите полоски двустороннего скотча для устранения проскальзывания моторов. Установите мотора как на фото.15 и закрепите их с помощью нейлоновых стяжек. Нейлоновые стяжки и двусторонний скотч можно приобрести в магазинах торгующих ремонтно-строительными материалами.
нажимайте фото для просмотра в полном размере
Подготовьте две крепёжных металлических стойки (фото.16). Их можно взять от элемента крепежа старых материнских плат. Вам также потребуются: два винта с плоской головкой, две гайки и две шайбы. Установите стойки как показано на фото.17, фото.18 и зафиксируйте их винтами со стороны батарейного отсека.
нажимайте фото для просмотра в полном размере
нажимайте фото для просмотра в полном размере
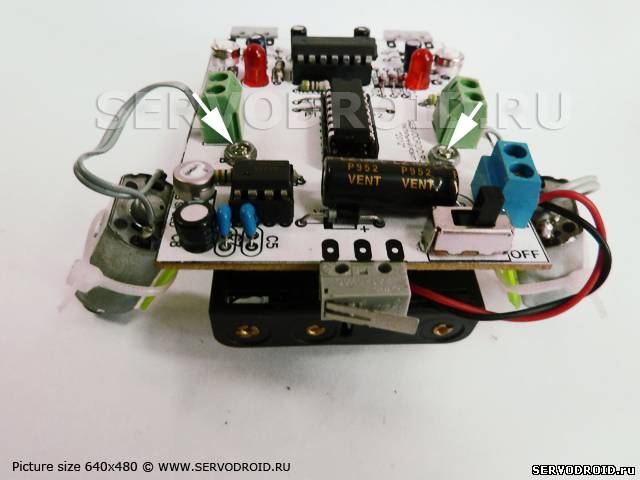
Установите футляр и силовую раму с моторами со стороны токоведущих дорожек печатной платы (под днищем робота), так чтобы футляр открытой частью был обращён вниз (фото.21). Закрутите гайки с противоположной стороны, со стороны радиокомпонентов (фото.22, фото23). На фото.23 белые стрелки указывают на гайки с помощью которых фиксируется футляр и силовая рама с моторами. Установка футляра для батареек открытой частью вниз позволяет легко провести замену батареек после того как их ресурс будет исчерпан.
нажимайте фото для просмотра в полном размере
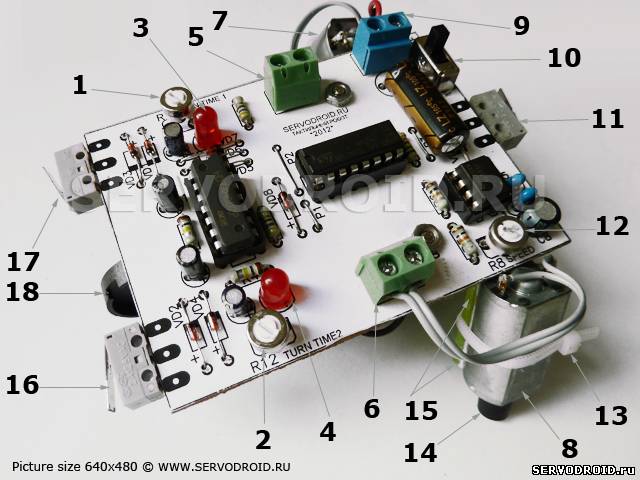
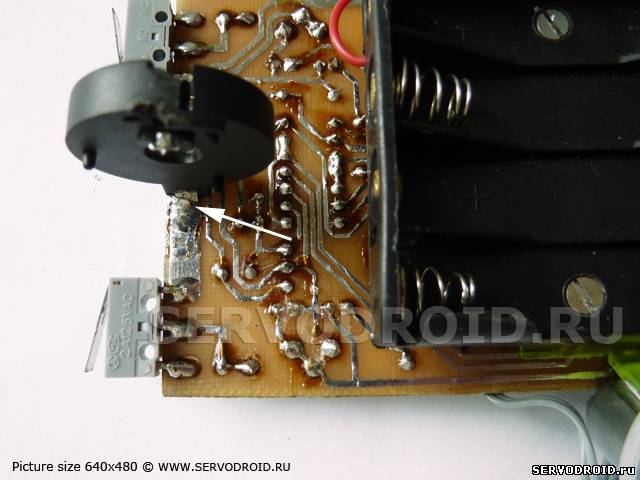
Передняя опора выполнена из футляра для литиевых батареек CR2032 (фото.24). Возьмите футляр для CR2032 горизонтальной установки (1), отогните одну из контактных пластин как на фото.24. Отогнутая контактная пластина футляра (2) с одной стороны и короткая контактная часть будет использоваться для пайки к поверхности печатной платы. Установите футляр со стороны токоведущих дорожек в продольном направлении в передней части печатной платы на широкую металлизированную область (фото.25). Припаяйте футляр-колесо за широкую контактную пластину большим количеством припоя (фото.25). Будьте внимательны при пайке, рядом расположена токоведущая дорожка, постарайтесь не сделать замыканий.
Установите четыре батарейки ("типоразмер 3A") в футляр (фото.26).
нажимайте фото для просмотра в полном размере
 фото.27.нажимайте фото для увеличения.
Проведите предварительную настройку робота, которая поможет избежать стандартных ошибок при первом включении.
ИСТОЧНИК ПИТАНИЯ. Установленные батарейки должны быть "свежими" ! Если необходимо проведите проверку их напряжения с помощью цифрового мультиметра. РЕГУЛИРОВКИ ПОВОРОТА. Установите ручки регулировок подстроечных резисторов R3,R12 в среднее положение. Учитывайте в дальнейшем, что позиционно подстроечные резисторы R3,R12 расположены зеркально. Это означает, что вращение ручки по часовой стрелке для одного подстроечного резистора будет увеличивать длительность поворота для мотора, допустим M1. А для другого подстроечного резистора вращение по часовой стрелке будет уменьшать длительность поворота для мотора M2. РЕГУЛИРОВКА СКОРОСТИ. Установите ручку регулировок подстроечного резистора R8 в среднее положение. Вращение ручки этого резистора по часовой стрелке будет увеличивать скорость передвижения робота, а вращение против часовой стрелки -уменьшать. Включите робота проведите проверку регулировки скорости по вышеприведённой методике. ТАКТИЛЬНЫЕ ДАТЧИКИ. Проверьте работу тактильных датчиков расположенных в передней части печатной платы. Нажимайте любой из микропереключателей SF1,SF2 попеременно. При нажатии любого из микропереключателей SF1,SF2 некоторое время должны светиться сразу два светодиода HL1,HL2, робот отъедет назад и повернёт вправо или влево. Если во время свечения светодиодов HL1,HL2 нажать на полоску микропереключателя SF3, то оба светодиода погаснуть и робот поедет вперёд. Проверка работы тактильных датчиков SF1,SF2,SF3 по вышеприведённой методике означает, что схема работает правильно. Сборка окончена!
В архиве к тактильному роботу: в папке чертёж термоклише в точных размерах. Преобразовывать и редактировать чертежи нельзя! После скачивания распечатайте чертежи на лазерном принтере. Распечатайте термоклише на глянцевой бумаге и используйте для перевода рисунка на стеклотекстолит по методу ЛУТ.
Скачать архив Архив к тактильному роботу с чертежами. Размер архива 418kb
Пароль к архиву mux100Авторство на статью принадлежит © [url=http://www.servodroid.ru]SERVODROI.RU -Робототехника для начинающих своими руками[/url]. Если Вы читаете это сообщение пожалуйста, [url=http://www.servodroid.ru]сообщите нам[/url].
Пароль к архиву mux100.Авторство на статью принадлежит © [url=http://www.servodroid.ru]SERVODROI.RU -Робототехника для начинающих своими руками[/url]. Если Вы читаете это сообщение пожалуйста, [url=http://www.servodroid.ru]сообщите нам[/url].
Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим!
| |||||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||||
















| Всего комментариев: 7 | |

| |



 , которые установлены в футляре для батареек. Полное напряжение питания составляет 6 вольт. Не желательно использовать больше 6 вольт так как схзема может начать работать не так как надо, или же сгореть.
, которые установлены в футляре для батареек. Полное напряжение питания составляет 6 вольт. Не желательно использовать больше 6 вольт так как схзема может начать работать не так как надо, или же сгореть.