13:24 Датчик – Лазерный прицел | ||
 Изначально я строил этот датчик, чтобы осуществлять навигацию. Мне нужно было найти способ определения расстояния до 3х целей от некой точки отчёта, поэтому лазерная указка идеально подходила. Теперь мне нужно было обнаруживать отраженный свет. Сначала я подумал об интегральных схемах, используемых по принципу инфракрасных приемников дистанционного управления, но эти устройства продаются только с объединяющим чувствительным элементом IR и фильтром, устраняющий видимый свет. Мне не везло: недорогие лазерные указки светят красным, а длина волны красного цвета выходила за пределы той, которую мог распознать мой датчик. Я тогда нашел Plessey SL486 -это старый чип приемника дистанционного управления, в схеме которого не было ни фотодиода, ни фильтра, поэтому он мог улавливать диапазон красного цвета. Но к сожалению этот чип слишком стар: его больше не выпускают, и его трудно найти, да и цена отражает его недостатки! Поэтому я продолжил искать идеальную интегральную схему, и, наконец, наткнулся на ряд фоточувствительных устройств, сделанных Хамамацу. Некоторые из них не имели внешнего светового фильтра, и включали фотодиод с синхронным демодулятором. Прекрасно! То что надо! Здорово ... почти. Продукты Хамамацу не доступны через дистрибьюторов электроники (по крайней мере во Франции). Первая цель для того, чтобы Еще не время строить лазерный датчик еще не выполнена... сложная задача с программным обеспечением, я еще его не написал. Как я часто говорю : мой любимый язык программирования – это паяние ! Но у этого датчика есть и много других применений, типа для Робота собирающего бочки и т.п.
Описание схемы
 Благодаря S6986,плата очень проста и не требует многих компонентов. D2, D3, D5 и D6 формируют ректификатор моста, позволяющий включить кубик соединителя датчика в любом направлении . C1 фильтрует электропитание, он должен находиться близко к IC1, чтобы защитить его должным образом. IC1 - Хамамацу датчик S6986, "сердце" этого датчика. LED продукция ведет лазер с 1/16 цикла, включенный фотодиод собирает отраженный свет. Внутренняя схема обработки коррелирует полученный свет к испускаемому свету, это позволяет очень точно обнаруживать предметы даже если свет лазера сильно рассеян.
Когда S6986 получает достаточно отраженного света, информация идет в нижний уровень (R1 ограничивает ток), и полярность датчика RCX становится "верной". Точное расстояние находится. Подбор комплектующих
Используемые диоды – главный критерий маленький размер, тип диода - 1N4148. C1 - 10µF 10В конденсатор. D7 - лазерный диод, его я взял из обычной лазерной указки, купленной за несколько евро, и убрал все внутренности "шелуху". Я уже объяснил выбор S6986, вот - его спецификация. Отметьте, что модель S4282-51 тоже можно использовать.
Цели
Легкая часть... Я использовал части 40мм трубы поливинилхлорида, покрытые отражающей пленкой, обычно используемой на спецодежде, шлемах мотоциклистов...
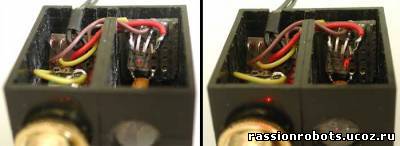
 Эти фотографии показывают эффект отражения: левый, сфотографированный при рассеянным освещение, выглядит нормальным, в то время как правый (с плёнкой) кажется пылает, потому что свет вспышки отражается прямо в фотоаппарат. Отметьте, что датчик может обнаружить другие отражающие поверхности (зеркала, металлические трубы ...), но отражатели кошачьего глаза намного более надежны. Зеркала должны быть перпендикулярны к лазерному лучу.
Изготовление лазерного датчика - Лазерный прицел
Эта диаграмма показывает главные компоненты датчика, и как они механически расположены. Электроника проста, но сборка сложна!
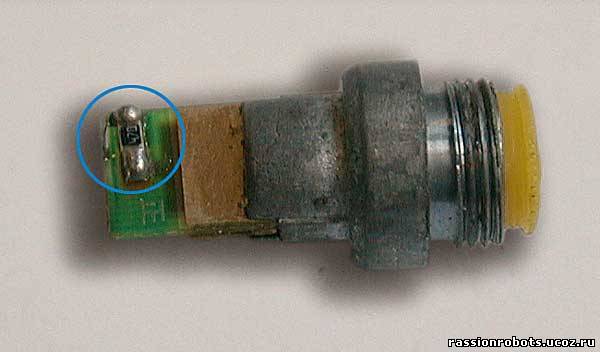
 Я использовал дешёвую лазерную указку.
 Лазерный модуль извлечен из неё.
 Я отрезал выключатель и контакт батареи, чтобы уменьшить размер. Резистор на 47 Ом, установленный последовательно с лазерным диодом был заменен на 68 Ом, как показано в схеме выше (R2), что компенсирует более высокое напряжение от RCX (8V вместо 4.5V).
Предостережение: Хотя Хамамацу, S6986 включает 50 мА генератор постоянного тока для лазера, НО, не удаляйте R2 ! Я сделал это в своём первом опыте и спалил лазер за 1 минуту!!!
 Целый датчик умещается в коробке, сделанной из четырёх кубиков LEGO 2x4.
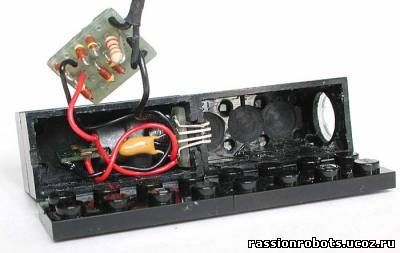 Перед склеиванием лазерного модуля в месте, Вы должны тщательно выровнять луч. Я поставил здесь стенку для этого. Стенку можно удалять или приближать, но точка лазера должна оставаться на том же месте
 Во 2м отделении находится S6986 и C1 – конденсатор.
 Лазерный луч должен быть так близко к S6986 насколько возможно. Тут он размещен над лазерным отверстием.
Линза перед датчиком собирает свет и концентрирует его на чувствительной области Хамамацу. Без линзы рабочий диапазон был бы менее 1 метра, в то время как с ней -5 - 10 метров. Я использовал пластмассовую линзу, взятую из одноразовой камеры. Ее фокусное расстояние - 30мм 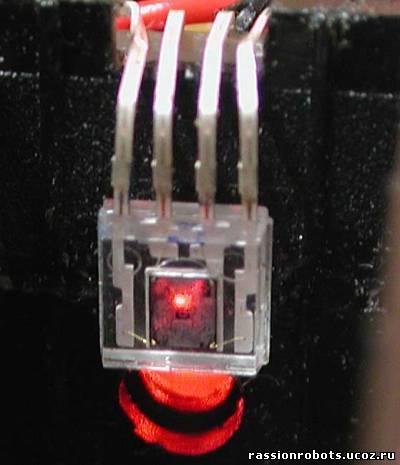 Вам нужно чтобы отраженный луч вернулся на интегральную схему в чувствительную область. Поместите цель 1 или на расстоянии в 2 метра, нацельтесь на неё лазерным лучом датчика и отрегулируйте положение S6986.
Анализ ошибок...
 В первой версии этой модели, лазер и уловитель были далеко друг от друга.
 Кирпичная стена отделяет датчик от лазера, чтобы не было попадания света от лазера на улавливающую поверхность. К сожалению, оптические оси слишком отдаленны: отраженный луч не попадал на приёмник, если расстояние менее 50cm. Т.е. аппарат получился дальнозорким, что не плохо для опыта(но не годится для практики) - т.к. он мог определять цели дальше чем 10м.
Этот датчик не нуждается не в какой испытательной программе. Он используется как световой сенсор, он работает на 100 % если луч отразился от цели.
Оригинал статьи http://www.mindstorms.su/sensors_1_text_08.html
Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований. Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;) | ||
|
| ||

| Всего комментариев: 3 | |
|
| |


