21:27 БИБОТ-2 | ||||||||||||||||||||||||||||||||||
 БИБОТ-2 - это новый усовершенствованный робот, который выполнен на основе схемы робота БИбот-1. Теперь робот поддерживает три функции: управление с ик-пульта (любого), бег по трассе, движение за источником света. Важным отличием от предыдущей модели робота (бибот-1) является статичность фототранзисторов, не нужно менять их положение при переходе на другой режим работы. Переключение режимов осуществляют с помощью пин-переключателей. Предусмотрено отключение ик-светодиодов с регулировкой яркости свечения.
В режиме управления от ПДУ, робот поворачивает в одну сторону при нажатии кнопки пульта (от любой аппаратуры). С помощью установок можно изменить вектор поворота на поворот в другую. Бибот-2 имеет независимые регуляторы скорости моторов, с большей стабильностью. Как и в предыдущей модели эти регуляторы одновременно влияют на чувствительность к источнику света. Но при движении по трассе, есть возможность дополнительно изменять степень реакции на отражённый свет с помощью регулятора яркости ик-светодиодов. В режиме движения за источником света (управление светом фонарика) можно значительно усилить реакцию фототранзисторов на свет нестандартным способом. Этот приём будет подробно описан в данной статье. В конце статьи будет предложен апгрейд, сборка дополнительного модуля. Чувствительность к источнику света возрастёт до максимума! После установки модуля робот будет передвигаться по трассе без подсветки и бежать за световым пятном на тёмной поверхности! ***
На приведённых видеофрагментах (плейлист в проигрывателе) последовательно показаны все режимы работы робота до и после установки дополнительного модуля. Через панель навигации видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель навигации доступна после запуска видео, справа внизу значок пиктограммы. Перед запуском каждого видеофрагмента автоматически выводится его название в верхнем левом углу. В нижней части окна проигрывателя слева название плейлиста и количество сгруппированных видеофрагментов.
2.ХАРАКТЕРИСТИКИ И ФУНКЦИОНАЛ.
нажимайте фото для просмотра в полном размере.
1.КОНСТРУКЦИЯ.
Робот собран по гибридной модульной технологии. Корпус выполнен из бумаги (картона) на распечатанном шаблоне. Модуль с установленными радиокомпонентами из стеклотекстолита, закреплён на корпусе. Дополнительные компоненты также смонтированы непосредственно на корпусе. Для усиления конструкции в наиболее нагруженных частях установлены рёбра жёсткости.
2.МОТОРЫ.
В конструкции установлены два мотора, которые расположены под углом относительно поверхности печатной платы. Моторы крепятся на усиленной ребрами жёсткости поверхности крыльев. В конструкции робота осуществляется прямая передача момента вращения с вала мотора на поверхность передвижения. Для увеличения коэффициента с поверхностью на валы моторов надеты протекторы (резиновые ролики).
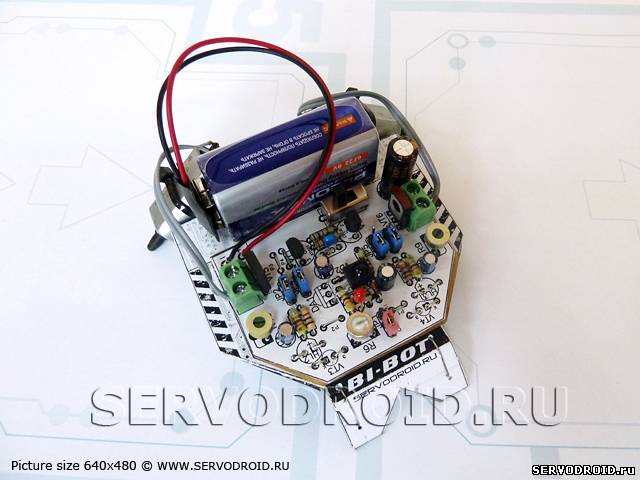
3.ИСТОЧНИК ПИТАНИЯ.
Источник питания батарея типоразмера 6F22 напряжением 9 вольт. Батарея расположена вертикально рядом с моторами и закреплена двусторонним скотчем. Простой и лёгкий доступ позволяет осуществить быструю замену. Включение-выключение питания осуществляется с помощью расположенного на печатной плате микровыключателя.
4.РЕГУЛИРОВКИ СКОРОСТИ И ЧУВСТВИТЕЛЬНОСТИ К СВЕТУ.
В конструкции робота предусмотрена независимая установка скорости вращения моторов и чувствительности к свету. Для этого, на печатной плате по бокам, размещены два подстроечных резистора (R9,R10). Вращая подвижные контакты подстроечных резисторов можно установить скорость передвижения по трассе или чувствительность при движении за источником света. При настройки необходимо помнить, что усиление чувствительности к свету приведёт к увеличению скорости и наоборот.
5.РЕГУЛИРОВКА ЯРКОСТИ СВЕЧЕНИЯ ИНФРАКРАСНЫХ СВЕТОДИОДОВ И ПИН-ВЫКЛЮЧАТЕЛЬ.
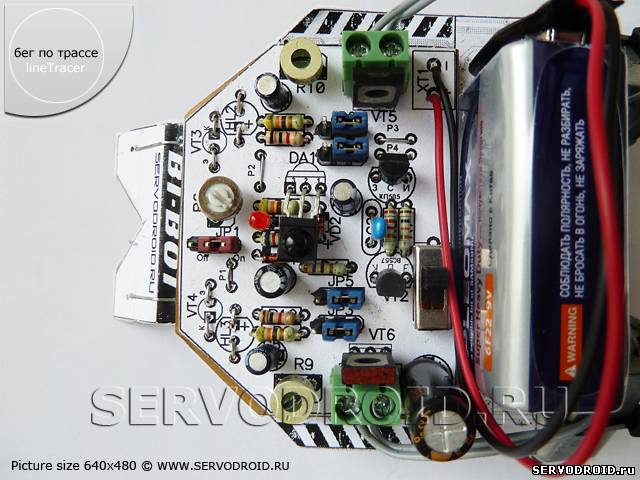
Для установки оптимального уровня яркости инфракрасных светодиодов (ик-светодиодов) подсветки предусмотрена регулировка яркости свечения. Регулировка осуществляется с помощью установленного в передней части платы подстроечного резистора (R6). С помощью регулировки можно более точно подстроить реакцию на отражённый свет при движении робота по трассе. ПИН-выключатель включает-отключает цепь питания двух ик-светодиодов. ПИН-выключатель используется при переходе на режим управления ПДУ для отключения ик-светодиодов в целях экономии энергии источника питания. Пин-выключатель установлен в передней части платы рядом с регулятором яркости свечения. 6.ДВИЖЕНИЕ РОБОТА ПО ТРАССЕ. В этом режиме робот движется по несложной трассе. Трасса не должна иметь крутых близко расположенных поворотов. Режим устанавливается с помощью пяти джамперов (JP1,JP2,JP3,JP4,JP5). Трасса подсвечивается инфракрасным излучением от двух светодиодов (HL2,HL3). Интенсивность излучения инфракрасных светодиодов устанавливают с помощью подстроечного резистора R6 расположенного в передней части печатной платы. Положение джамперов для режима "движение по трассе" показано на фото.4.
7.ДВИЖЕНИЕ ЗА ИСТОЧНИКОМ СВЕТА. В этом режиме робот движется за световым пятном от луча фонарика. В новом варианте нет необходимости передвигать фототранзисторы. Их расположение вертикальное и ориентировано вниз. Из-за такого расположения чувствительность данной модели робота к источнику света ниже, чем у первой модели Бибот-1. Чтобы компенсировать недостаточную чувствительность не усложняя схему необходимо включить ик-светодиоды. Включение ик-светодиодов выполните установкой перемычки джампера JP1 в положение "on" (включено). Подсветка ик-излучением увеличивает ток через фототранзисторы и соответственно увеличивает их чувствительность к любому источнику света. Дополнительно (см. видео.2) собирается поле из 3х3 листов (архив в конце статьи). Поле собранное из белых листов обладает высоким коэффициентом отражения и облегчает управление роботом. Аналогично будет эффективна любая светлая поверхность. Положение джамперов для режима "движения за источником света" показано на фото.5. 8.ДИСТАНЦИОННОЕ УПРАВЛЕНИЕ ИК-ПУЛЬТОМ. В этом режиме робот движется самостоятельно, но при нажатии кнопки на пульте дистанционного управления поворачивает. Чем дольше удерживается кнопка на пульте, тем на больший угол поворачивает робот. Таким образом можно задавать любое направление для движения робота. Во время нажатия кнопки на пульте ДУ, при удачном приёме команды на плате робота вспыхивает светодиод красного цвета свечения. Это обусловлено серией отрицательных импульсов сформированных на выходе фотоприёмника при приёме ик-команды пульта. Пульт управления может быть от любой бытовой аппаратуры, например от телевизора. Положение джамперов подробно приведено ниже в таблицах. Джампер JP1 должен находиться в выключенном положении "off". Джамперы JP4,JP5 задают направление поворота (вправо или влево). Положение джамперов для режима "дистанционное управление" показано на фото.6. 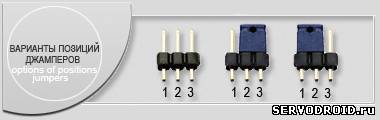 Фото.3.Варианты установки и пин-нумерация джамперов.
Компоненты конструкции робота представлены на фото.6, положение джамперов произвольное. На фотографии не видны протекторы установленные на валах моторов.
Электрическая схема робота представлена на рис.1. Электрическая схема содержит два параллельных электронных регулятора на транзисторах VT5,VT6 и фотоприёмник со схемой питания и коммутации, подсветку трассы на ик-светодиодах. Работа такого регулятора подробно описана в статье Бибот-1 раздел3 принцип работы (ссылка).
Базовые выводы транзисторов VT5,VT6 через простой переключатель выполненый на джамперах JP4,JP5, подключены к коллекторам фототранзисторов. Таким образом переключение джамперов изменяет порядок коммутации фототранзисторов. Например в исходном по схеме положении фототранзистор VT3 подключен через джампер JP4 к транзистору VT6, а фототранзистор VT4 подключен через джампер JP5 к транзистору VT5. Такая позиция (замкнуты выводы 1 и 2 джамперов) соответствует режиму "движение за светом". Изменение положения перемычек джамперов JP4,JP5 (замыкание 2 и 3) приведёт к переключению базовых выводов транзисторов VT5,VT6 и соответственно изменению режима работы на "бег по трассе". В новом варианте схемы (рис.1) для каждого ик-светодиода введены токоограничительные резисторы R1,R2. Эти резисторы выравнивают яркость свечения светодиодов HL2,HL3, и не допускают падения яркости свечения при взаимном влиянии параллельно включенных светодиодов. Последовательно ик-светодиодам HL2,HL3 подключен подстроечный резистор R6, с помощью которого можно изменять ток через светодиоды и следовательно менять их яркость свечения. С помощью джампера JP1 можно прерывать ток через светодиоды HL2,HL3 одновременно, то есть включать-выключать их. Выключение ик-светодиодов необходимо при работе в режиме от ПДУ, чтобы не расходовать энергию батареи. Приём ик-сигналов от пульта управления организован на резонансном фотомодуле DA1 (TSOP1836). Питание фотомодуля DA1 осуществляется через стабилизатор выполненный на резисторе R4 и стабилитроне VD1. Резистор R4 ограничивает ток стабилитрона и ток нагрузки на выходе стабилизатора. Стабилитрон рассчитан на напряжение 5,1 вольт при напряжении большем указанного через него начинает протекать ток удерживая таким образом потенциал 5,1 вольт на выводах. На катоде стабилитрона VD1 выделяется положительное напряжение +5 вольт, которое поступает на вывод 3 фотомодуля. Положительное напряжение +5 вольт также поступает через резистор R5 на конденсатор (плюсовую обкладку) C3 и быстро заряжает его до +5 вольт. Положительная обкладка конденсатора C3 соединена с затвором полевого транзистора VT1. Поэтому при достижении потенциала приблизительно от 0,8 вольт на положительной обкладке конденсатора C3 начнёт протекать ток через канал полевого транзистора VT1 в следствии его открытия. С увеличение потенциала до 3 вольт на затворе полевого транзистора произойдёт лавинообразное падение сопротивления канала. Потенциал стока станет равным нулю и база транзистора VT2 окажется подключенной через резистор R8 к минусу источника питания. Транзистор VT2 откроется в следствии инжекции электронов в базовом выводе и через переход эмиттер-коллектор потечёт ток. На коллекторе транзистора VT2 появится положительный потенциал, который будет приложен к верхнему по схеме выводу подстроечного резистора R9. Иначе говоря подстроечный резситор R9 окажется включенным в режиме регулятора тока. На среднем выводе подстроечного резистора R9 вращением подвижного контакта можно будет установить рабочую точку (потенциал) для фототранзистора VT4. Во время поступления ик-сигнала от пульта ДУ, на выходе 1 фотоприёмника DA1 формируются последовательности из отрицательных импульсов. Эти импульсы поступают через токоограничительный резистор R3 на светодиод HL1, который вспыхивает в такт с поступающими импульсами. Светодиод HL1 предназначен для визуальной сигнализации приходящих импульсов, то есть подтверждения приёма ик-сигнала. Одновременно последовательность отрицательных импульсов с выхода 1 фотомодуля DA1 пройдёт через катод диода VD2 и поступит на положительную обкладку конденсатора C3. Конденсатор начнёт быстро разряжаться приходящими отрицательными импульсами до тех пор пока на его обкладке не окажется нулевой потенциал. Этот потенциал будет удерживаться через открытый катод диода VD2 и транзистор расположенный в корпусе фотоприёмника DA1. Отрицательный потенциал на положительной обкладке конденсатора C3 вызовет запирание полевого транзистора VT1. Канал плевого транзистора увеличит сопротивление до максимального и на его сток через резистор R7 поступит положительный потенциал. Этот потенциал через резистор R8 поступит на базу транзистора VT2 и закроет его. Ток через переход эмиттер-коллектор транзистора VT2 упадёт до нуля и потенциал на его коллекторе упадёт до нуля. На среднем выводе подстроечного резистора R9 окажется отрицательный потенциал, который вызовет закрытие коммутируемого в данный момент (например VT5) транзистора и следовательно обесточивание обмотки мотора M1. Вал мотора M1 остановиться робот начнёт поворачивать в сторону. Если ик-сигнал от пульта ДУ прекратиться, то импульсная последовательность на выходе 1 фотоприёмника смениться положительным потенциалом. Это вызовет запирание диода VD2, так как положительный потенциал поступает на катод диода. Через резистор R5 конденсатор C3 быстро зарядится до напряжения +5 вольт и последовательно откроются транзисторы VT1,VT2. Схема вернётся в исходное состояние, будут работать оба мотора, робот поедет вперёд. Чтобы фототранзисторы VT3,VT4 не влияли при работе в режиме дистанционного управления их шунтируют параллельным подключением резисторов сопротивлением 1 кОм. Подключение выполняют с помощью джамперов JP2,JP3.
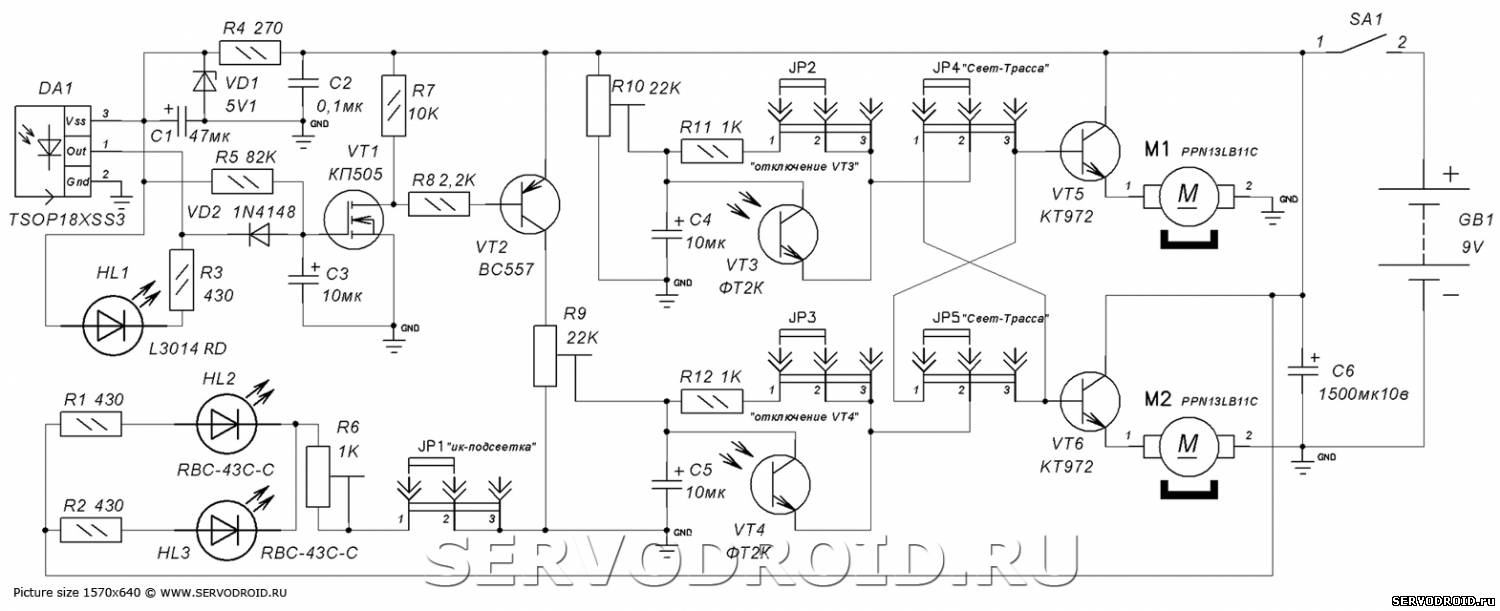 Рис.1. нажмите для просмотра в полном размере.
Примечание. Диод 1N4148 можно заменить на отечественные аналоги КД521 или КД522. Но при монтаже учитывайте тот факт, что метка-кольцо на импортном диоде 1N4148 расположена рядом с катодом, а на отечественном КД522 кольцо расположено рядом с выводом анода. Поэтому при замене импортного диода на отечественный аналог необходимо напаивать его наоборот.
Скачайте архив размещённый в конце статьи. Используйте термоклише для изготовления печатной платы методом ЛУТ. Предварительно зачистите фольгированную поверхность стеклотекстолита, промойте и высушите. Выполняйте перевод по известной методике ЛУТ, рисунка токоведущих дорожек. Проведите травление в растворе. Промойте печатную плату холодной водой, высушите. Проведите лужение с помощью флюса (фото.8). После изготовления печатной платы проведите проверку токоведущих дорожек мультиметром на предмет коротких замыканий (фото.9).
нажимайте фото для просмотра в полном размере.
 Фото.8  Фото.9
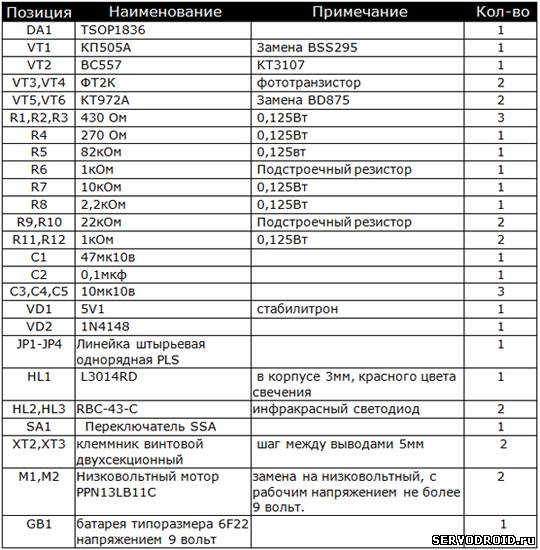
2.Монтаж радиокомпонентов. Из архива распечатайте сборочный (монтажный) чертёж на офисном (обычном) листе формата А4. Вырежьте монтажный чертёж по контуру и приклейте к поверхности изготовленной печатной платы. Обратите внимание, на то, что отверстия на чертеже должны быть точно совмещены с отверстиями на печатной плате (фото.10). Выполните монтаж радиокомпонентов с помощью таблицы 1. Джамперы изготавливают из штыревых линеек и замыкающих пластиковых контактов (фото.11). Фотоприёмник TSOP1836 установите на среднюю длину выводов, которые затем загните под прямым углом так, чтобы фотоприёмник был ориентирован вверх (фото.12). На плату необходимо установить и запаять перемычки на позициях P1,P2,P3,P4. Их удобно брать от отрезанных выводов резисторов или других деталей, или использовать одножильный тонкий провод. Монтаж фототранзисторов VT3,VT4 и светодиодов HL2,HL3 инфракрасного диапазона выполняется следующим образом. Ик-светодиоды (HL2,HL3) установите со стороны токоведущих дорожек в соответствии с указанной на монтажном чертеже полярностью. Выводы ик-светодиодов должны быть продеты через отверстия на позиции для светодиодов. Загните продетые выводы светодиодов и с помощью монтажных пласткогубцев протяните их через расположенные рядом с позицией отверстиями обратно. Запаивайте выводы ик-светодиодов со стороны токоведущих дорожек (фото.13). Аналогично выполните монтаж фототранзисторов. Если фототранзисторы в металлическом корпусе, рекомендуется выполнять монтаж так, чтобы корпус не касался токоведущих дорожек.
нажимайте фото для просмотра в полном размере.
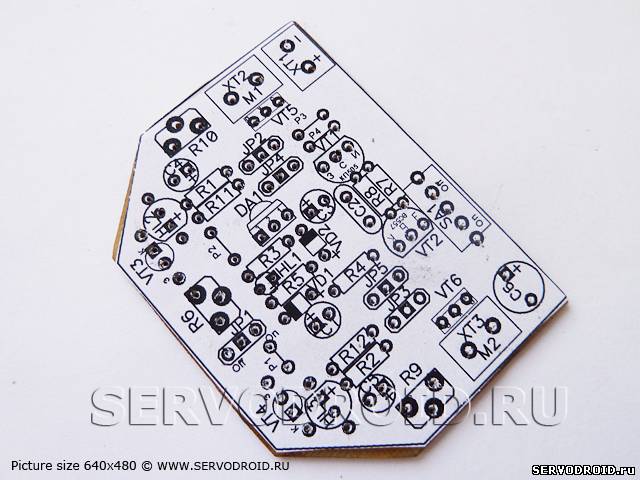 Фото.10
 Фото.11
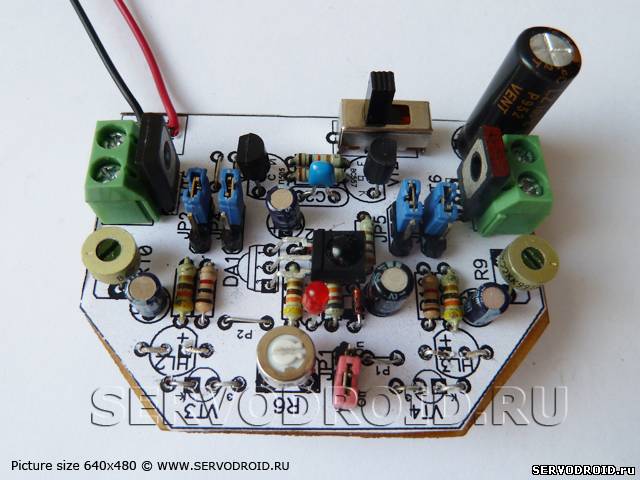 Фото.12
Фото.13
Извлеките из архива чертёж корпуса. Распечатайте его на листе белой офисной бумаги формата А4. Подготовьте лист тонкого гофрокартона. На фото. в правом нижнем углу показан гофрокартон с торцевой части. Гофрокартон состоит из трёх частей: два ровных поверхностных слоя и промежуточного гофрированного слоя. Наклейте чертёж корпуса на тонкий гофрокартон. Вырезайте ножницами корпус по периметру (внешнему краю). Инструкции по сборке корпуса хорошо проиллюстрированы на странице для Бибот-1, поэтому повторять их в фотографиях нет смысла. Инструкции по сборке корпуса для Бибот-2 и Бибот-1 одинаковы. Воспользуйтесь приведённой ссылкой для изучения (ссылка).
4.Монтаж моторов. Чтобы обеспечить сцепление вала мотора с поверхностью во время движения робота, используйте протектор. Для этого приобретите два гелиевых стержня. Снимите с гелиевого стержня закрывающий резиновый колпачок. Оденьте колпачки на на валы обоих моторов (фото.15, фото.16). Если колпачки свободно проворачиваются, то на валы моторов необходимо одеть тонкие трубочки-кембрики. Припаяйте к контактам моторов монтажный провод или провод от компьютерного шлейфа.
Для крепежа моторов используйте нейлоновые стяжки (фото.17). Установите моторы на позиции и закрепите с помощью нейлоновых стяжек (1) фото.18. На позицию для установки батарейки необходимо прикрепить двусторонний скотч (2) фото.18.
нажимайте фото для просмотра в полном размере
 Фото.15 Фото.16  Фото.17
Фото.18
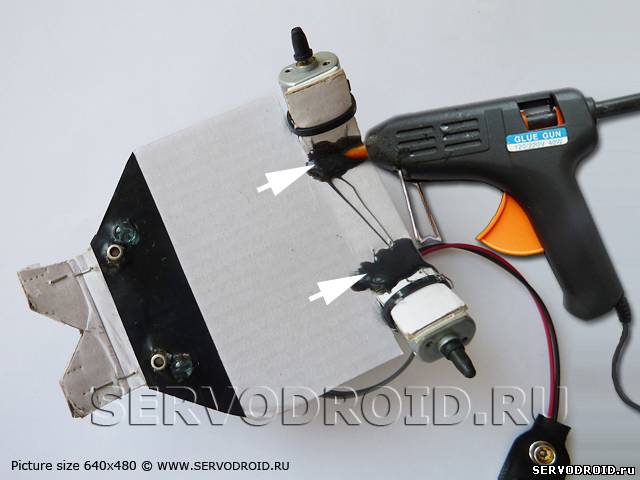
Аккуратно обработайте края отверстий, которые обозначены белыми стрелками, так чтобы они были ровными без рваных краёв. На поверхность корпуса установите печатную плату так, чтобы фототранзисторы и светодиоды точно попали в отверстия на корпусе (фото.19). На поверхности корпуса в разметкой "BAT 9V" должен быть приклеен прямоугольник из двустороннего скотча. После установки печатной платы, разместите источник питания (батарейку 9В) на поверхности двухстороннего скотча (область разметки "BAT 9V") и прижмите.
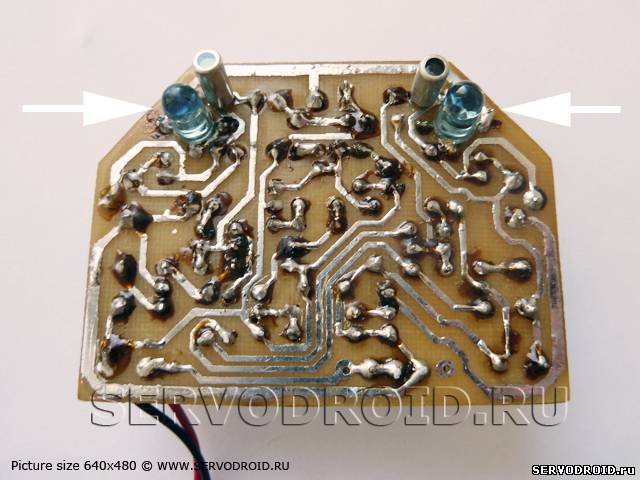
Подключите выводы моторов к расположенным рядом разъёмам (фото.19). Возьмите клеевой пистолет и залейте термопластичным клеем области крепежа мотора с тыльной стороны (фото.20).
нажимайте фото для просмотра в полном размере
 Фото.19
Фото.20
6.НАСТРОЙКА. До проведения настройки робота проверьте напряжение источника питания! Батарейка должна быть "свежей"! Проведите проверку в режиме движение по трассе. Для это выполните установку джамперов по фото.4. Поставьте робота на белый лист бумаги формата А4. Подстроечным резистором R6 установите яркость свечения инфракрасных светодиодов HL2,HL3. С помощью подстроечных резисторов R9,R10 отрегулируйте оптимальную скорость передвижения по трассе. Если робот "вылетает" с трассы, то необходимо уменьшить скорость передвижения по трассе и яркость свечения инфракрасных светодиодов. Проведите проверку в режиме движение за источником света. Для это выполните установку джамперов по фото.5. Соберите трассу из архива или поставьте робота на белый лист бумаги формата А4. Для повышения чувствительности необходимо подстроечным резистором R6 установить небольшую яркость свечения для инфракрасных светодиодов HL2,HL3. С помощью подстроечных резисторов R9,R10 отрегулируйте скорость передвижения робота. Не забывайте, что подстроечные резисторы R9,R10 одновременно изменяют чувствительность к источнику света. Рекомендуется использовать в качестве источника света фонарики с яркими лампам накаливания. Проведите проверку в режиме дистанционного управления. Для это выполните установку джамперов по фото.6. Установите робота на ровную поверхность и с помощью подстроечных резисторов R9,R10 выставьте малую скорость передвижения. Для управления используйте любой пульт дистанционного управления, например от телевизора. Выберите любую кнопку и нажмите. В момент нажатия робот должен повернуть. Чем дольше вами удерживается кнопка, тем на больший угол повернёт робот. Таким образом его можно развернуть на 360 градусов. Сборка окончена!
 7.АПГРЕЙД, СБОРКА И УСТАНОВКА МОДУЛЯ УСИЛИТЕЛЯ. С помощью модуля усилителя можно значительно повысить чувствительность схемы робота к источнику света. В этом случае появляются два неоспоримых преимущества: движение по трассе без подсветки трассы ик-светодиодами (видео.4) и передвижение за светом по тёмной поверхности (видео.5). Чертежи модуля размещены в архиве. Все чертежи в точных размерах! ВНИМАНИЕ! При использовании в конструкции робота (на основной печатной плате) отечественных фототранзисторов ФТ2К, возможна неустойчивая работа модуля. Это связано с тем, что фототранзисторы ФТ2К имеют значительный разброс по характеристикам. В результате может оказаться, что наибольший ток будет только с одним фототранзистором. При освещении фонариком робот будет быстро поворачивать в одну сторону и плохо в другую. 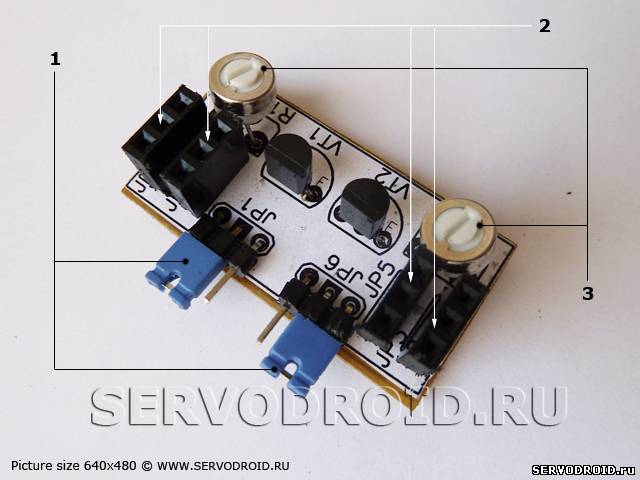 Модуль состоит и двух транзисторов обратной проводимости включенных в режиме усилителя тока. Ввиду простоты схема не приводится. Базовые выводы транзисторов подключены через подстроечные резисторы. С помощью этих подстроечных резисторов можно управлять базовым током и соответственно регулировать эмиттерный ток транзисторов. После изготовления печатной платы модуля наклейте на её поверхность монтажный чертёж модуля (из архива). После установки модуля на плату робота будет доступно только переключение между двумя режимами: движение по трассе и бег за светом. Управление с пульта будет недоступно, поэтому для дистанционного управления придётся снять модуль. Переключение между режимами осуществляют с помощью джамперов JP1,JP6 (1) установленных на плате модуля усилителя (фото.22). Через разъёмы (2) осуществляется подключение модуля к основной плате робота (фото.22). Подстроечными резисторами R1,R2 (3) расположенными на модуле регулируется чувствительность усилителя для каждого из моторов. Табл.2 Список радиокомпонентов модуля усилителя.
нажимайте фото для просмотра в полном размере
 Фото.23
Фото.24
нажимайте фото для просмотра в полном размере
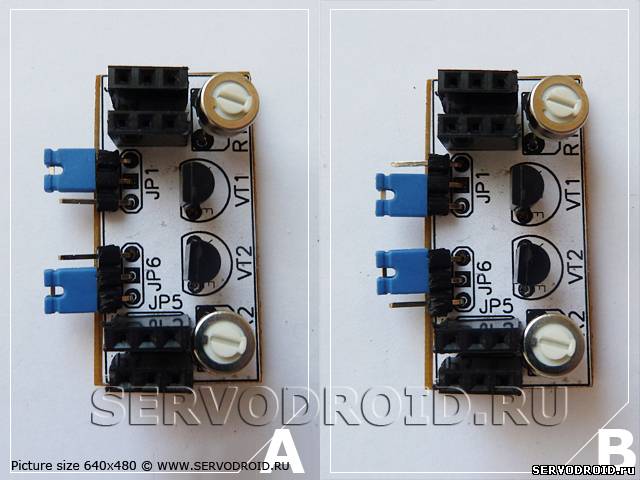
Фото.25
 Фото.26 В архиве: монтажный чертёж печатной платы, термокопия для перевода печатной платы, чертёж корпуса, две однолистовых трассы, метод лут-перевода.
Архив к статье Бибот-1 пароль не требуется. Все чертежи в точных размерах, не изменять, не редактировать! Размер архива 2,82Mb Скачать архив
автор Алексей Высоковольтный www.servodroid.ru
© Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено! Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований. Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;) | ||||||||||||||||||||||||||||||||||
|
| ||||||||||||||||||||||||||||||||||










| Всего комментариев: 14 | |


| |
 ъ
ъ 


