23:10 Методические рекомендации к проведению олимпиады по Arduino | ||
 В конце января, текущего года в школах Санкт-Петербурга, и должно быть в других школах по всей России проводятся олимпиады по направлению "технология", в рамках которой также проводится направление "Робототехника: Arduino", где ребятам предлагают принять участие и заработать дополнительные (полезные) баллы по обучению, которые в дальнейшем помогут им с вступлением в ведущие ВУЗы по соответствующим направлениям.
(Видео: олимпиада по робототехнике Arduino)
Как и предыдущие олимпиады, а точнее: олимпиада по Arduino на международном фестивале РобоФинист и районная олимпиада, проходившая в 2018 году, так и эта региональная олимпиада - проводилась и готовилась нами - то мы можем поподробнее о ней Вам рассказать. А чуть позднее разработаем специальную методическую рекомендацию, в которой отобразим все этапы подготовки школы к таким олимпиадам и подробно расскажем о всех подводных камнях, и способах их обойти. И так, 31 января на базе Центра робототехники Санкт-Петербургского Президентского физико-математического лицея №239 мы организовали и провели практическую олимпиаду по Arduino. К участию в олимпиаде было допущено 8 участников, которые смогли полностью подготовить всю необходимую информацию, - разработать презентации своих проектов, рассказать о них, пройти анкетирование по технологическим (с направлением в робототехнику) вопросам и как итог - собрать по выданному заданию самого робота. Далее мы предоставляем пошаговые рекомендации для организаций и школ, которые хотят проводить подобные мероприятия по Arduino Методические рекомендации, разрабатываемые для проведения олимпиады по технологии, в рамках которой в школах проводятся олимпиады по робототехнике. Данные рекомендации разработаны с целью обеспечения равных условий участников, которые будут участвовать в мероприятиях по всей России. Данные методические рекомендации разработаны Москвой и согласованы с нами в части материально-технического обеспечения. Сама рекомендация рассылается образовательным учреждениям и пока мы не можем опубликовать ее в открытом виде, но можем точно сказать, что все что указано в рекомендации - переносится в само олимпиадное задание, которое выдается участникам. В данных рекомендация указаны размеры, типы платформ и оборудования, обязательного к выдаче участнику олимпиады.
Давайте разберем что должно входить в методическую рекомендацию: 1. Тип робототехнической платформы, на базе которой должен строиться проект: Arduino UNO. Данная платформа выбрано по причине максимальной популярности и себестоимости. Есть много различных робототехнических платформ, таких как LEGO EV3, TRIX, и прочих, благодаря которым можно собирать роботов. Но самая популярная несомненно Arduino. Сами платы Arduino есть в различных исполнениях (UNO, NANO, PRO) и можно найти очень дешевые варианты (от 200 рублей) - что позволяет привлечь к этому направлению максимальное количество учащихся. Ну и конечно Arduino более технологичная, чем другие конструкторы, ведь тут нужно понимать как схемотехнику, так и программирование с конструированием.
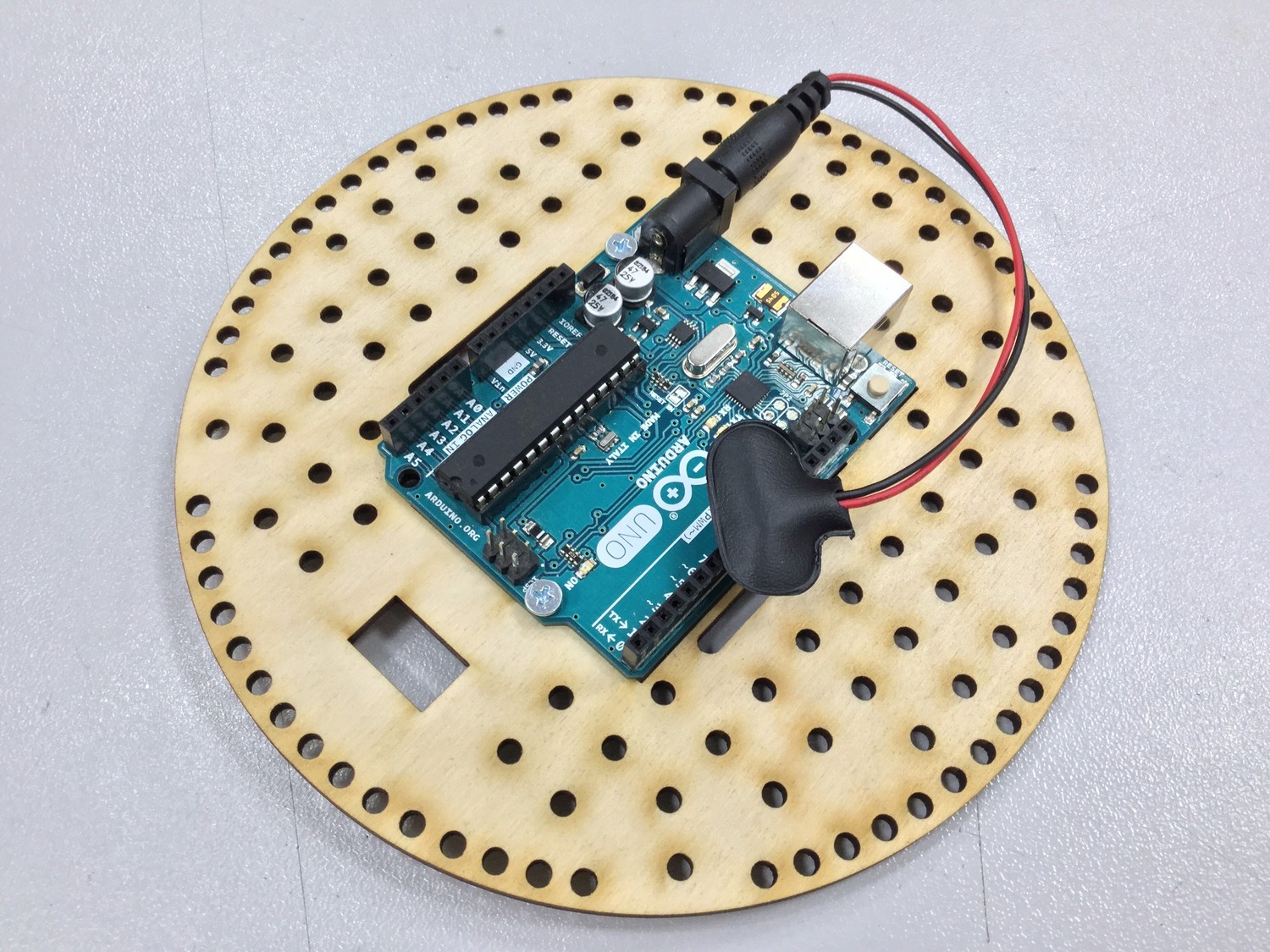
2. Подвижная платформа/шасси робота: в данном пункте предполагается использование некой универсальной платформы, на базе которой можно закреплять все исполнительные узлы, датчики, контроллеры, моторы и все остальное. В качестве типовой платформы выбрана круглая платформа, размерами не менее 122 мм и не более 145 мм в диаметре. Платформа должна быть двухуровневой, предполагая размещение механики и электроники в разных отсеках. Нижняя часть платформы должна позволять подключать два мотора, с их центральным расположением, а также места для установки двух дополнительных опорных волокуш или роликов, которые придадут круглой двухколесной платформе устойчивость. В платформе должны быть множество отверстий под болты М3, позволяющие закреплять датчики линии, платы Arduino, платы драйвера-двигателей, и прочие элементы конструкции.
3. Моторы: это очень важный момент! Олимпиада по робототехнике не предполагает выполнение задания на скорость. Тут важный момент - правильность сборки робота, за которые начисляются баллы, и 100% выполнение поставленного задания. Так вот, по нашим оценкам - самый оптимальный тип мотора должен иметь передаточное отношение от 120:1 до 150:1. Ранее мы использовали моторы с передаточным отношением 48:1, которые вы можете найти в каждом магазине робототехники. Это такие пластиковые желтые моторы, на которые насаживаются большие колеса. Обычно такие моторы идут уже комплектом с платформой. Моторы с передаточным отношением 48:1 неудобно использовать, так как замедлять робота достаточно не просто для участника, а чем робот едет медленнее - тем качественнее участник выполнит поставленную задачу. Таким образом оптимальный вариант указан выше. Советуем следовать ему. Самые популярные моторы с таким передаточным отношением: мотор-редуктор Gekko MR12-100 turbo (ссылка на магазин). Все моторы должны быть распаянными - к контактам моторов должны быть припаяны провода с выходом "папа", чтобы участник мог их подключать и зажимать винтами.
4. Драйвер двигателей: перебрав множество примеров готовых плат управления двигателей, которые совместимы с платой Arduino, мы решили указать на самый главный момент - драйвер двигателей должен быть максимально простым, чтобы его настройка проводилась без использования сторонних библиотек. Таким образом, если брать самый популярный вариант драйвера моторов - схему L293D, то и плата должна быть на его базе (или на базе его аналогов). Самый популярный и дешевый китайский драйвер двигателей, который мы использовали во всех олимпиадах - это L298N (ссылка на магазин). Данный драйвер прост в подключении и его схема проста и понятна для участников. Другие платы имеют дополнительные пины расширения, которые могут сбить с толку участников, запутать их, так как время у участников ограничено и организатору нужно максимально упростить процесс знакомства и подключения электроники. Драйвер двигателей должен иметь разъемы для подключения моторов и управляющих пинов контроллера беспаечным способом, то есть драйвер должен позволять подключать провода "папа-мама". Провода от моторов должны затягиваться на винтовые соединения.
(Фото драйвера двигателей L298N)
5. Датчики линии: для навигации робота на полигоне, в большинстве случаев обязательно использование датчиков линии. Самый хорошо зарекомендовавший себя вариант датчиков - аналоговый датчик. Благодаря использованию аналоговых датчиков участники могут проводить калибровку датчиков. Очень актуально это в том случае, когда вы закупаете датчики одного типа, но из-за особенностей сборки на производстве, зачастую эти датчики не показывают одинаковые значения при одинаковых внешних условиях - есть отличия. При работе с аналоговыми датчиками такие погрешности легко вычисляются и решаются программно. Самый популярный тип датчика линии - на базе оптопары TCRT5000. Такие датчики бывают двух вариантов - аналоговые, или цифровые+ аналоговые. Лучше приобрести сдвоенный тип датчика, чтобы участники могла выбрать удобный для себя вариант - цифровой или аналоговый. Датчики линии должны иметь разъемы для подключения проводов "мама-папа".
(Фото датчика линии TCRT5000 аналогового и цифрового)
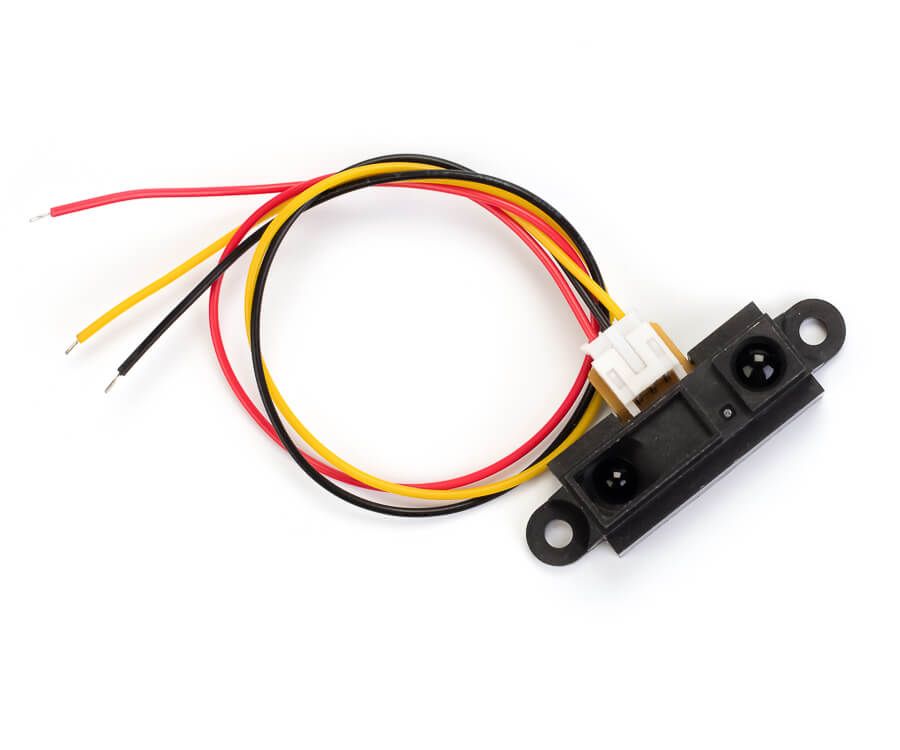
6. Дальномер: для определения препятствий роботом можно использовать утро-звуковые датчики. Но в рекомендация мы советуем использовать исключительно инфра-красные дальномеры. Дальномеры, также как и датчики линии - должны быть аналоговыми. Чтобы исключить использование библиотек. Дальномеры, которые мы рекомендуем, это: Sharp 2Y0A21 GP2Y0A21YK0F GP2D12. Данный датчик видит на дистанцию от 10 до 80 см, что достаточно для выполнения разрабатываемых заданий для олимпиады. Дальномер должен иметь распаянные выходы, например к нему можно припаять провода с разъемом "папа".
(Фото: Инфракрасный датчик расстояния Sharp 2Y0A21 GP2Y0A21YK0F GP2D12)
7. Провода: для подключения всей электроники и механики участникам должны быть предоставлены различные варианты проводов для прототипирования, которые используются в макетных платах. Эти провода имеют разные типы: папа-папа, мама-мама, папа-мама. А также длину и цвет. Выбирать провода лучше длинные, от 20 см, до 40. Длинные провода участник всегда сможет скрутить уменьшив их размер. Провода должны быть изолированными и не поврежденными, дабы избежать коротких замыканий.
8. Питание: для обеспечения питания роботом необходимо использовать исключительно аккумуляторные батареи, способные выдавать в сумме напряжение от 6 до 10 вольт. Таким образом к роботу можно подключать аккумуляторные батареи типа "Крона", но наша практика показывает, что эти батареи подходят не так хорошо, так как имеют малые объемы и в связи с этим быстро разряжаются. если предполагается использование аккумуляторных батарей, то вам придется закупить их в двойном количестве, предоставив участнику как минимум 2 батарейки и зарядную станцию. Стоит учитывать, что большинство умных зарядных станций сперва разряжают батарейку - и только после этого начинают ее заряжать, - а это время, которое участнику лучше не терять. По этому самый оптимальный вариант использования батареек - это аккумуляторные батарейки "Орбита", имеющие типоразмер: 18650 и напряжение: 3.7В. Это достаточно емкостные батареи, которые отлично подходят для выполнения задания и очень медленно разряжаются. Двух батареек может хватить на все время выполнения задания. ЛУчше иметь 4 аккумуляторных батарейки, дву из которых подключаются к роботу. Для подключения данных типов батареек стоит заранее приготовить разъемы для подключения.
9. Стабилизатор питания: для цифровой техники очень важно использовать стабильные источники питания. Так как контроллеры имеют свойство перезагружаться при значительной просадке питания, например при старте мощных сервомоторов или моторов у робота, то контроллер необходимо обезопасить и также дополнительно обеспечить возможность установки необходимого напряжения на драйвер двигателей. В большинстве случаев моторы выдают заданные обороты при определенных напряжениях, обычно 6В. Таким образом стабилизатор питания позволяет подать на драйвер двигателей стабильные 6 вольт, независимо от того стартует робот или стоит в ожидании. Стабилизатор должен быть понижающим, позволяя подключать питание от 6 до 40 вольт, и настраивать выходной диапазон напряжения от 1.5 до 12 воль (из всего диапазона обычно используется либо 5 либо 6 вольт).
10. Сервомотор: для выполнения заданий настоятельно не рекомендуется использовать дешевые пластиковые серво-моторы "Tower Pro SG90". Используйте сервомоторы с металлическим редуктором. Это позволит избежать быстрой его поломки на соревновании, так как пластиковые сервы очень легко сломать, даже программным способом.
(Фото сервомоторов)
11. Винты и гайки, стойки: для монтажа всех плат управления, датчиков и моторов участнику необходимо предоставить набор различных болтов и гаек, разных длин, а также стоек. Стойки желательно использовать только пластиковые, чтобы избежать возможных коротких замыканий. Так как стойки есть не у всех поставщиков в необходимом количестве - оптимальным решением будет заменить их на длинные винты.
(Фото винты, гайки, стойки)
12. Стяжки: в процессе монтажа у участника получается платформа с кучей проводов. Данные провода и некоторые механические злы робота необходимо надежно фиксировать, чтобы избежать их расшатывание, или, в случае с датчиками - дребезг контактов. Также стяжки помогают фиксировать провода и не давать им замыкать от другие электропроводящие поверхности робота, что очень часто происходит по невнимательности у участников. Также стяжки позволяют закрепить платы робота, не используя винты и стойки, что может облегчить платформу.
(Фото стяжек)
13. Металлический конструктор: для монтажа некоторых узлов робота, таких как дальномер, могут потребоваться некоторые дополнительные крепежные элементы, позволяющие вынести датчики в торону за платформу. Такими элементами становятся детали металлического конструктора. Они имеют разный профиль и отверстия по крепеж. Также в наборы можно добавить обычные палочки и картон, благодаря которому участники могут доработать конструкцию робота.
(Фото металлического конструктора)
14. Макетная плата: зачастую при использовании множества различных датчиков, у участника появляется проблема - все пины питания (+5В, +3.3В, GND) уже заняты для подключения другими модулями и есть датчики, которым не хватает ножек Arduino. Эту проблему легко решить включением в набор платы прототипирования «Breadboard»(макетной платы Arduino ) в которую втыкаются провода папа-мама, папа-папа. Таким образом участник может без пайки дополнительно организовать подключение датчиков.
Подводя черту о выше сказанным техническим рекомендациям, у вас должен получиться данный макет робота, который позволяет выполнять Олимпиадные задания по Arduino
Далее в рекомендации рассматривается:
Разработчик методической рекомендации: Мельников Сергей Алексеевич, педагог робототехники «Центр робототехники Президентского физико-математического лицея №239 г. Санкт-Петербург» Контакты: E-mail: melnik1412@yandex.ru Web: servodroid.ru Tel: +7 (999) 217-61-91 Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований. Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;) | ||
|
| ||









































| Всего комментариев: 0 | |