00:08 МУЛЬТИБОТ |
 МУЛЬТИБОТ - это робот с несколькими режимами работы и множеством настроек. В
статье приводится описание робота способного передвигаться как автономно, так и
с внешним управлением от ПДУ. В автономном режиме робот способен обнаруживать и
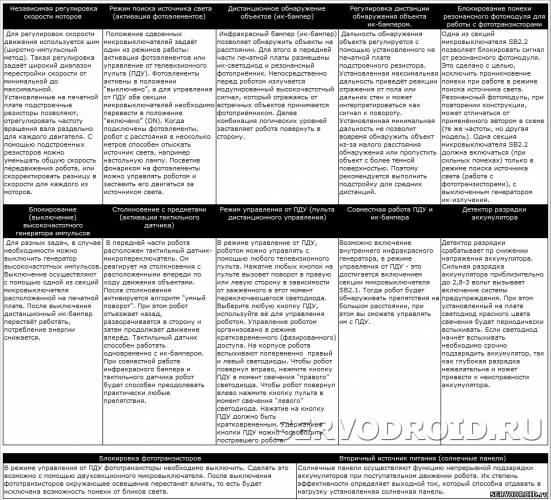
преодолевать препятствия с помощью контактного сенсора или дистанционного ик-датчика (ик-бампера). Возможно подключение солнечных панелей для подзарядки. При обнаружении препятствия с помощью ик-бампера робот сразу поворачивает. Дальность обнаружения препятствий регулируется. Фотоэлементы расположенные в передней части позволяют точно отслеживать источник света с большого (несколько метров) расстояния. Чувствительность и качество наведения таково, что робот способен найти и точно подъехать к включенному фонарику с расстояния в несколько метров! На корпусе робота расположен переключатель режимов работы фото-ИК управление. В режиме ик-управление роботом можно управлять с любого пульта ДУ от телевизора. Доступно две команды: поворот вправо и поворот влево. Независимая регулировка скорости моторов с помощью установленных подстроечных резисторов. При разрядке батареи включается система предупреждения глубокой разрядки и начинает работать сигнальный светодиод. |
***
1.ВИДЕОТЕСТЫ.
Через панель навигации
видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель
навигации доступна после запуска видео, справа внизу значок
пиктограммы. Перед запуском каждого видеофрагмента автоматически
выводится его название в верхнем левом углу. В нижней части окна
проигрывателя слева название плейлиста и количество сгруппированных
видеофрагментов.
В
представленных видеофрагментах продемонстрированы основные режимы
работы мультибота. Солнечные панели не установлены, питание от
аккумулятора. На видео.1
робот обходит препятствия используя дистанционный ик-бампер и
контактный датчик (микропереключатель). При столкновении с объектом
робот отъезжает назад, затем поворачивает. При обнаружении объекта с
помомощью ик-бампера робот сразу поворачивает. На видео.2
робот движется за лучом фонарика. Плавность поворотов и точное
следование за лучом света обеспечивается схемотехническим решением. На видео.3
робот точно находит источник света (фонарик) и подъезжает. Источник
света должен находиться в прямой видимости, но может быть расположен и
под углом к роботу. На видео.4
дистанционное управление роботом с помощью ик-пульта от телевизора. В
этом режиме доступны две команды: поворот вправо и влево, пульт может
быть любой модели. |
Видеофрагменты 1-4
ВСЕ РОБОТЫ на канале DROID1020 !!! подпишись и смотри. Переход по ссылке жми!
ALL ROBOTS on the DROID1020 channel! ! ! be signed and look. Transition according to the link
ВСЕ РОБОТЫ на канале DROID1020 !!! подпишись и смотри. Переход по ссылке жми!
ALL ROBOTS on the DROID1020 channel! ! ! be signed and look. Transition according to the link
2.ОСНОВНЫЕ ХАРАКТЕРИСТИКИ.
На фото.1 и фото.2 показан робот с разных ракурсов в сборке .
нажимайте фото для просмотра в полном размере
 фото.1 |  фото.2 |
Конструкция.
Робот выполнен на печатной плате из одностороннего стеклотекстолита
размерами 100х115мм, толщиной 1-1,5мм. Монтажная плата стеклотекстолита,
одновременно выполняет функции корпуса. Все основные силовые узлы и
элементы тоже выполнены из стеклотекстолита. Дополнительные элементы и
шасси крепятся непосредственно к корпусу, через технологические
отверстия, кронштейны.
Моторы, ходовая часть.
В конструкции робота осуществляется прямая передача вращающегося
момента с вала мотора на поверхность. Моторы физически расположены под
углом к поверхности печатной платы. Для увеличения коэффициента
сцепления с поверхностью на валы моторов надеты протекторы (резиновые
ролики).
Источник питания. Источник питания литий-ионная аккумуляторная батарея от сотового телефона напряжением 3,7 вольт. Аккумуляторная батарея размещена и закреплена под поверхностью печатной платы. Максимальная продолжительность работы робота определяется ёмкостью литий-ионного аккумулятора. Чем больше его ёмкость, тем дольше будет функционировать робот. Подзарядка аккумулятора осуществляется без отсоединения через установленный на плате робота разъём.
Источник питания. Источник питания литий-ионная аккумуляторная батарея от сотового телефона напряжением 3,7 вольт. Аккумуляторная батарея размещена и закреплена под поверхностью печатной платы. Максимальная продолжительность работы робота определяется ёмкостью литий-ионного аккумулятора. Чем больше его ёмкость, тем дольше будет функционировать робот. Подзарядка аккумулятора осуществляется без отсоединения через установленный на плате робота разъём.
Выключатель питания.
Выключатель питания выполняет сдвоенную функцию. В одном положении
питание поступает на схему робота. В другом положении схема
переключается на зарядку аккумулятора! Во время зарядки схема робота
обесточена, выключена логическая часть и не поступает питание на моторы.
3.ФУНКЦИОНАЛ РОБОТА.Функционал
робота включает несколько режимов работы и регулировок. Режимы
устанавливают с помощью микровыключателей расположенных на поверхности
печатной платы.
нажимайте для просмотра в полном размере.
нажимайте для просмотра в полном размере.
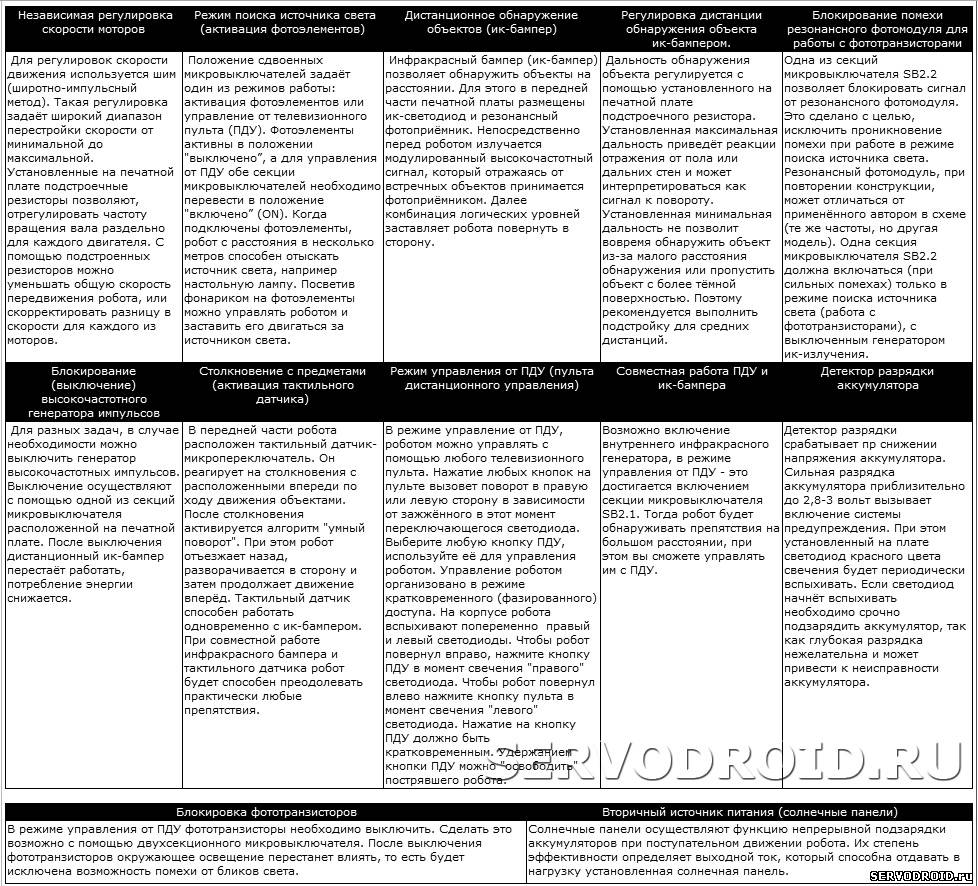
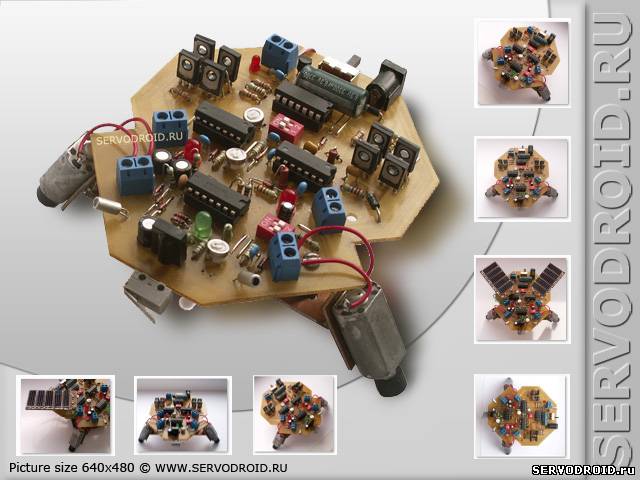 фото.3 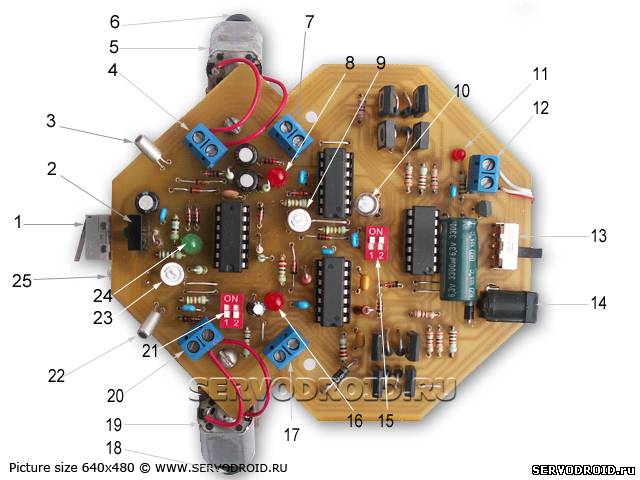 фото.4 | На фото.3 показан робот "мульбот" без
установленных солнечных панелей в сборке. На мелких фотографиях показан
"мультибот" в разных ракурсах. Фото.1 и фото.2 кликабельны, нажимайте для просмотра в полном размере! КОМПОНЕНТЫ КОНСТРУКЦИИ РОБОТА 1. Тактильный датчик (микропереключатель). 2. Приёмник ик-бампера (резонансный фотомодуль). 3. Фототранзистор (правый). 4. Клеммник винтовой (подключение прав. мотора). 5. "Правый" мотор. 6. Протектор-колесо (ролик) 7. Клеммник винтовой (подключение прав. солн. панели). 8. Сигнальный светодиод красного цвета свечения. 9. Регулятор скорости правого мотора. 10.Регулятор скорости левого мотора. 11.Индикатор разрядки аккумулятора (светодиод). 12.Клеммник винтовой подключения источника питания. 13.Выключатель питания. 14.Гнездо-разъём подзарядки аккумулятора. 15.Блокировка фототранзисторов (двухсекционный выключатель). 16.Сигнальный светодиод красного цвета свечения. 17.Клеммник винтовой (подключение лев. солн. панели). 18.Протектор-колесо (ролик) 19."Левый" мотор. 20.Клеммник винтовой (подключение лев. мотора). 21.Блокировка ик-генератора, фотомодуля (двухсекц. микровыключатель). 22.Фототранзистор (левый). 23.Регулятор дистанции обнаружения ик-бампера. 24.Сигнальный светодиод принятого ик-сигнала (зелёного цвета). 25.Излучатель ик-бампера (инфракрасный светодиод). Примечание.1. Инфракрасный светодиод генератора ик-бампера расположен со стороны токоведущих дорожек. Примечание.2. Протекторы (резиновые ролики) предназначены для увеличения сцепления с поверхностью и одновременно выполняют функцию колеса. Примечание.3. Монтаж винтовых клеммников-разъёмов можно не выполнять, в этом случае выводы моторов, источника питания и солнечных панелей соединяют с точками подключения монтажным проводом напрямую. Примечание.4. Разъём для подзарядки аккумулятора должен соответствовать штекеру зарядного устройства. В случае несоответствия поменяйте штекер на зарядном устройстве. Примечание.5. Источник питания необходимо разместить под поверхностью печатной платы (снизу), например на силовой раме. |
4.ПРИНЦИП РАБОТЫ.
Принципиальная электрическая схема показана на рис.1. Конструкция робота имеет в своём составе следующие основные блоки: четыре независимых генератора, два из которых управляемые по шим-методу, схемы сравнения DD1.3,DD1.4, синхронного детектора DD2.3, два драйвера моторов на транзисторах VT1-VT8, приёмного ик-модуля DA1, детектора падения напряжения DA2.
Рассмотрим работу схемы в режиме управления от ПДУ. В этом режиме обе секции микровыключателя SB1 должны находиться в положении включено (ON). А фиксируемая кнопка SB2 в положении "отжато”. Нажатие на кнопку ПДУ приводит к появлению отрицательных импульсов на выводе 3 ик-модуля DA1. Сам модуль питается через развязку VD1C1. Её задача стабилизация и защита от импульсного сигнала помехи. Без данной цепочки ик-модуль работать не будет, так как индуктивная нагрузка подключенных двигателей будет вызывать значительные всплески напряжения по цепи питания. Конденсатор C7 в исходном состоянии разряжен. На входе элемента DD2.4 высокий логический уровень, а на его выходе 3 низкий логический уровень. Поэтому сигнальный светодиод HL5 не светится. Вообще назначение светодиода HL5 сигнализировать о получении ик-импульсов при нажатии кнопки на ПДУ. Это облегчает управление роботом или настройку схемы. Беспрепятственно проходя через диод VD4, отрицательные импульсы быстро заряжают конденсатор C7 до нулевого потенциала. Элемент DD2.4 переключается и на его выходе 3 устанавливается высокий логический уровень. Светодиод HL5 зажигается, и высокий уровень поступает на выводы 5 и 12 элементов DD1.3,DD1.4. Элементы DD1.3, DD1.4 проверяют появление сигналов высокого уровня на своих входах и если таковые присутствуют, то на их выходах устанавливается низкий логический уровень. Но низкий уровень на выходах элементов DD1.3,DD1.4 не может появиться одновременно, так как их включение производится попеременно симметричными импульсами с выходов низкочастотного генератора DD1.1,DD1.2.
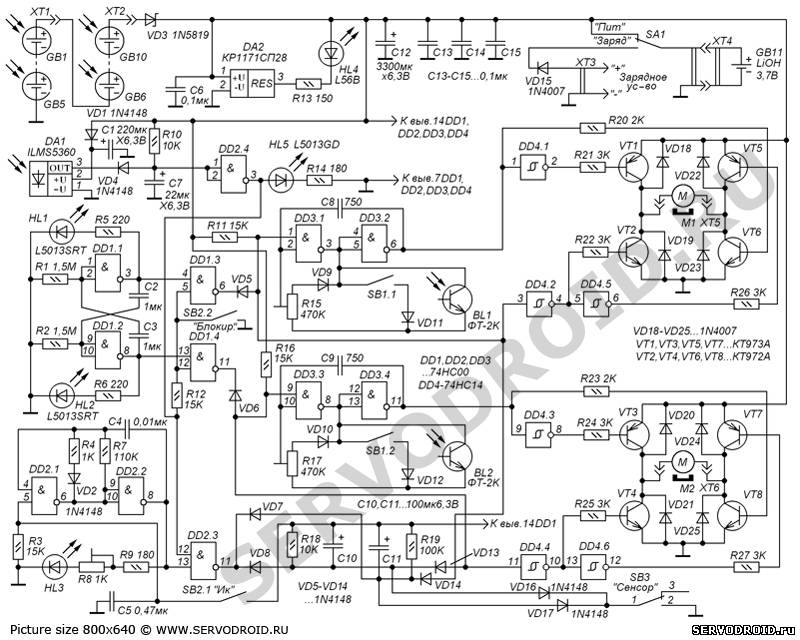 рис.1.нажимайте для просмотра в полном размере. | На элементах микросхемы DD1.1, DD1.2 выполнен низкочастотный генератор
симметричных импульсов. Этот генератор разрешает кратковременный доступ к
управлению роботом через ПДУ. Разрешённые интервалы доступа
подсвечиваются светодиодами HL1 и HL2. Если при зажженном
светодиоде HL1 нажать кнопку ПДУ, то робот повернёт влево, а при
зажженном светодиоде HL2, робот повернёт вправо. Чтобы модель робота
правильно среагировала на команду нажатие должно быть
кратковременным. При работе генератора на его выходах 3 и 8 попеременно
появляются единичные уровни, вспыхивает подключенный в данный момент
светодиод. Высокие логические уровни, поступают на входы элементов
сравнения DD1.3,DD1.4. Если в этот момент на одном из входов любого из
элементов присутствует два высоких уровня, то элемент переключиться и на
его выходе установится низкий логический уровень. Этот уровень,
проходя, допустим через диод VD5, поступит на вход управляемого
шим-генератора DD.31,DD3.2. шим-генератор будет немедленно заторможен и
на его выходе также установится низкий логический уровень. Два шим-генератора имеют идентичную структуру, первый генератор выполнен
на элементах DD3.1,DD3.2, а второй на элементах DD3.3,DD3.4. Для
пояснения работы схемы будем рассматривать только один из них, допустим
это генератор на элементах DD3.1,DD3.2. Ширина импульсов на выходе
такого генератора изменяется под действием внешних условий. Это свойство
очень удобно для управления скоростью вращения электродвигателя.
Генератор управляется по входу 1, секцией выключателя SB1.1 или
фототранзистором BL1. |
Секцией выключателя SB1.1 переключают режим работы управление от ПДУ или от фототранзистора. При замкнутом положении SB1.1 можно управлять шим-генератором от ПДУ по входу 1. Нажатие кнопки ПДУ будет вызывать, при совпадении сигналов с генератора DD1.1,DD1.2 низкого уровня, который остановит шим-генератор на элементах DD3.1,DD3.2. Подстроечный резистор R15 позволяет в ручную регулировать ширину импульса на выходе генератора, и, следовательно, скорость вращения вала электродвигателя M1. При разомкнутом положении SB1.1 ширина положительных импульсов на выходе генератора DD3.1,DD3.2 будет изменяться, от минимальной до максимальной, в зависимости от освещенности корпуса фототранзистора BL1. При минимальной освещенности ширина импульсов будет незначительна, и вал двигателя вращаться не будет. С ростом уровня освещённости в помещении сопротивление фототранзистора будет уменьшаться, а ширина импульсов на выходе генератора DD3.1,DD3.2 будет пропорционально увеличиваться. Это приведёт к увеличению частоты вращения вала электродвигателя. Аналогично работает шим-генератор на элементах DD3.3,DD3.4, но управляет он уже двигателем M2.
Логические элементы DD4.1,DD4.2,DD4.5 и транзисторы VT1,VT2,VT5,VT6 образуют драйвер управления двигателем M1. С помощью логических сигналов можно переключать направление вращения вала двигателя или управлять его скоростью. В исходном состоянии положительные импульсы с выходов 6 и 11 генераторов DD3.1,DD3.2 и DD3.3,DD3.4 открывают транзисторы VT1,VT6 двигатель M1 вращается в одном направлении и модель робота движется вперёд.
Когда генератор на элементах DD3.1,DD3.2 заторможен, низкий логический уровень с его выхода поступает на базу транзистора VT6 и закрывает последний. Одновременно низкий логический уровень поступает на вход элемента DD4.1 вызывая переключение элемента в противоположное состояние. На выходе элемента DD4.1 появляется высокий логический уровень, который поступает на базу транзистора VT1 и так же закрывает его. Произойдёт остановка вала двигателя M1. А поступающий через диод VD5 такой же низкий логический уровень вызовет переключение элемента DD4.2. С его выхода высокий логический уровень откроет составной транзистор VT2 и инвертированный элементом DD4.5 откроет транзистор VT5. Вал двигателя M1 начнёт вращаться в противоположном направлении и робот повернёт.
Элементы микросхемы DD2.1,DD2.2 генерируют высокочастотный сигнал с фиксированной частотой около 36кГц. Диод VD2 введён в схему для получения короткого импульса. Генератор позволяет роботу обнаруживать перед собой предметы на расстоянии. Для того чтобы излучаемый ИК-сигнал был не слишком мощным излучающий светодиод HL3 подключен непосредственно к выходу элемента DD2.2. Последовательно светодиоду HL3 подключен подстроечный резистор R8 с его помощью, можно установить ток через светодиод, следовательно, и дистанцию до объекта на которую будет реагировать модель робота. Приёмником отражённого излучения является резонансный модуль DA1. Он выполняет две функции принимает ик-излучение от ПДУ или отражённое излучаемое от встроенного генератора. Эти режимы устанавливают секцией микровыключателя SB2.1 и микровыключателем SB1. Когда резонансный модуль DA1 получит отражённый сигнал элемент DD2.4 сформирует из него высокий логический уровень, который поступит на вход 12 элемента DD2.3. На вход 13 в этот момент поступит высокий логический уровень с выхода генератора DD2.1,DD2.2. Элемент DD2.3 работая в режиме синхронного детектора, переключится и на его выходе 11 установится низкий логический уровень. Пройдя через диоды VD7,VD8 низкий логический уровень зарядит конденсатора C10,C11. Одновременно он заблокирует генераторы DD3.1,DD3.2 и DD3.3,DD3.4, и переключит элементы DD4.2,DD4.4 в противоположное состояние. Это в свою очередь приведёт к открытию транзисторов VT2,VT5 и VT4,VT7. И двигатели M1,M2 начнут одновременно вращаться в противоположном направлении. Так как сопротивление резисторов R17,R18 шунтирующих конденсаторы C10,C11 различно, то время разрядки конденсаторов будет также неодинаковым. Следовательно, время действующего напряжения на элементы DD4.2,DD4.4 тоже будет различно. Модель робота поедет назад с разворотом. Когда конденсаторы C10,C11 разрядятся элементы DD4.2,DD4.4 вернутся в исходное состояние. Робот сначала остановится и затем снова поедет вперёд, но вектор движения уже будет другой.
Ик-генератор на элементах DD2.1,DD2.2 включается-выключается кнопкой SB2. Если кнопка не нажата, то генератор заблокирован минусовым потенциалом, поступающим через резистор R3 на вывод 5 элемента DD2.1. Когда кнопка SB2 нажата на вывод 5 элемента DD2.1 поступит высокий потенциал и включит генератор.
Микропереключатель SB3 играет роль тактильного сенсора, который детектирует столкновение с предметами. Это схемотехническое решение выбрано не случайно. Дело в том, что обнаружение предметов при помощи только ик-детектора затруднительно, так как объект может оказаться тёмного цвета. Тогда фотоприёмник вообще не увидит объект, и робот с ним столкнётся. Кроме того, излучение от внутреннего генератора, который используется для дистанционного обнаружения объектов, может являться помехой при управлении с ПДУ. Поэтому в конструкцию было решено ввести тактильный датчик функцию которого выполняет микропереключатель с металлической полоской. Он установлен в передней части модели робота. При столкновении с предметами срабатывание датчика SB3 подключает конденсаторы C10,C11 к минусу источника питания через диоды VD16,VD17. Конденсаторы C10,C11 заряжаются и далее происходят уже описанные выше процессы, что и при появлении низкого логического уровня на выходе элемента DD2.3. В результате этих процессов модель робота отъедет назад с разворотом.
На транзисторах VT1-VT8 выполнены два идентичных драйвера для управления двигателями M1,M2. Чтобы защитить двигатели от эдс самоиндукции, в схему введены мощные диоды VD18-VD25 включенные в обратном направлении. Элементы микросхемы DD4 инвертируют входной сигнал управления и распределяют потенциалы для правильного включения транзисторов VT1-VT8. Разберём работу драйвера выполненного на элементах DD4.1,DD4.2 и транзисторах VT1-VT6. Когда на вход элемента DD4.1 поступит высокий уровень, транзисторы VT1,VT6 откроются, а транзисторы VT2,VT5 будут заперты. Вал двигателя M1 будет вращаться в одном направлении. А когда на вход элемента DD4.1 поступит низкий логический уровень, транзисторы VT1,VT6 закроются, транзисторы VT2,VT5 откроются. При этом вал двигателя M1 будет вращаться в противоположном направлении. Аналогично работает второй драйвер на элементах DD4.3,DD4.4 и транзисторах VT3-VT8.
Питается конструкция робота от литий-ионного аккумулятора GB11 с номинальным напряжением 3,7 вольта. Конденсатор C12 играет роль стабилизатора цепи питания при значительных токах потребления, например подключении двигателей. Для уменьшения влияний пульсаций в непосредственной близости от микросхем DD1-DD3 по цепи питания установлены блокировочные конденсаторы C13-C15 ёмкостью 0,1мкФ. Напряжение на аккумуляторе непрерывно контролируется с помощью детектора DA2. Когда напряжение на аккумуляторе GB11 упадёт до 2,8-3 вольт микросхема DA2 подключит нижний по схеме вывод светодиода HL4 к минусу источника питания. Светодиод начнёт вспыхивать, это означает, что пора подзарядить аккумулятор. Чтобы не усложнять конструкцию, светодиод HL5 выбран мигающим, его прерывистые вспышки более заметны. Для подзарядки аккумулятора необходимо перевести выключатель питания SA1 в положение "заряд”. При этом аккумулятор будет отключен от основной схемы. К гнезду XT3 подключить зарядное устройство от старого сотового телефона, тогда напряжение поступит через диод VD15 к аккумулятору. Диод VD15 защищает от неправильного подключения зарядного устройства.
Две присоединяемые солнечные панели генерируют дополнительное напряжение, которое непрерывно подзаряжает аккумулятор. Напряжение, вырабатываемое солнечными панелями, проходит через диод VD3 и подзаряжает конденсатор C12. А с обкладок конденсатора C12 напряжение поступает на аккумулятор. На каждой из панелей размещено по пять солнечных элементов. Каждый из элементов выдаёт по паспорту ЭДС, который составляет около 0,6 вольт при прямом ярком солнечном свете. Солнечные элементы собранные установленные на печатные платы суммарно генерируют от 3 до 6 вольт в зависимости от уровня освещенности помещения и расположения по отношению к источнику света.
5.ДЕТАЛИ И МАТЕРИАЛЫ.
Печатная плата изготовлена из
односторонне фольгированного листа стеклотекстолита толщиной 1-1,5мм. Размеры
печатной платы 100х115мм. Ссылка на архив с чертежами и разводкой под ЛУТ размещена в конце статьи. Список радиокомпонентов размещён в архиве!
Для правильной сборки придерживайтесь инструкций по сборке.
Редактировать, масштабировать чертежи в архиве нельзя, все чертежи
архива в точных размерах.
1.Изготовление печатной платы.
Предварительно зачистите фольгированную поверхность
стеклотекстолита, промойте и высушите. Выполняйте перевод по известной методике
ЛУТ, рисунка токоведущих дорожек. Проведите травление в растворе. Все инструкции по изготовлению печатной платы находятся в архиве.
ВНИМАНИЕ! После изготовления печатной платы обязательно проведите двухкратную проверку мультиметром всей поверхности на предмет коротких замыканий.
Рисунок токоведущих дорожек сложный, поэтому проверка является необходимым условием. Пропускать этот этап не рекомендуется! После проверки проведите лужение всей поверхности токоведущих дорожек флюсом нейтральным беспромывочным. Категорически не рекомендуется применять кислотные флюсы так как это может привести к множеству замыканий на печатной плате, и следовательно к её непригодности для монтажа.
ВНИМАНИЕ! После изготовления печатной платы обязательно проведите двухкратную проверку мультиметром всей поверхности на предмет коротких замыканий.
Рисунок токоведущих дорожек сложный, поэтому проверка является необходимым условием. Пропускать этот этап не рекомендуется! После проверки проведите лужение всей поверхности токоведущих дорожек флюсом нейтральным беспромывочным. Категорически не рекомендуется применять кислотные флюсы так как это может привести к множеству замыканий на печатной плате, и следовательно к её непригодности для монтажа.
2.Монтаж радиокомпонентов.
Разархивируйте архив в конце статьи. Воспользуйтесь монтажным чертежом, таблицей радиокомпонентов и выполните монтаж радиокомпонентов. На монтажном чертеже позиции P4-P8 перемычки из тонкого одножильного провода. Все резисторы отечественного или импортного производства мощностью 0,125Вт. В качестве фотоэлементов установлены отечественные фототранзисторы ФТ2К, допустима замена на любые импортные (подобрать экспериментально).
Обратите внимание на монтаж микровыключателя питания (позиция SA1). Микровыключатель должен иметь пять контактов, из них три контакта на переключение и два контакта идущие непосредственно от корпуса. При монтаже тщательно пропаяйте все пять контактов. В схеме корпус микровыключателя (два крайних контакта) используется как дополнительный проводник, учитывайте это в случае его замены на идентичные.
На фото.5 (вид со стороны токоведущих дорожек) показан монтаж микропереключателя и инфракрасного светодиода. Микропереключатель (1 на фото.3) нажимной с металлической полоской (позиция SB3 на монтажном чертеже) припаивают горизонтально, со стороны токоведущих дорожек.
Инфракрасный светодиод (2 на фото.5) (позиция HL3 на монтажном чертеже) паяют со стороны токоведущих дорожек с соблюдением полярности подключения. Этот способ монтажа исключает прямую засветку резонансного фотомодуля (DA1) и возникновение помех.

фото.5.нажимайте для просмотра в полном размере
3.Монтаж и установка моторов.
В конструкции робота использованы моторы от старого CD-ROM проигрывателя типа PPN13LB11C, можно устанавливать и другие с низким рабочим напряжением. К печатной плате моторы крепятся с помощью подвески собранной из трёх пластин стеклотекстолита. Подвеска собирается по чертежу, приведённому на рис.2. Для её изготовления возьмите двухсторонний фольгированный стеклотекстолит толщиной около 1,5-2мм. Вырежьте основную опорную планку размерами 90х15мм. Затем просверлите в ней два отверстия на расстоянии 65мм друг от друга. Изготовьте две одинаковых боковых пластины размерами 25х15мм. На пластинах будут закреплены электродвигатели. Соберите изготовленные пластины, соединив их припоем ориентируясь по чертежу рис.2 и фото.4 показано чёрными стрелками.
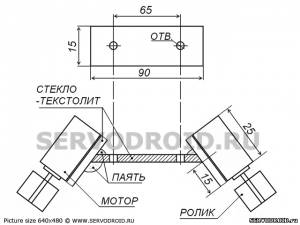
рис.2
4.Источник питания.
В качестве источника питания используется LIOH (литий-ионный) аккумулятор от старого сотового телефона с напряжением 3,6в или 3,7в. После зарядки на аккумуляторе будет напряжение около 4,15-4,25 вольта, что вполне достаточно для работы схемы. Зарядка выполняется с помощью зарядного устройства от сотового телефона. Для зарядки аккумулятора штеккер зарядного устройства необходимо подключить к гнезду XT3. Если полярность подключения окажется неверной, то защитный диод окажется запертым напряжение неправильной полярности на аккумулятор не поступит. Подзарядка аккумулятора осуществляется после установки выключателя SA1 в положении "зарядка". Основная схема будет отключена от аккумулятора, а зарядное устройство будет подключено. В схеме не предусмотрен контроль уровня заряда, поэтому степень зарядки придётся контролировать мультиметром. Аккумулятор крепят под днищем робота на подвеске для моторов. В качестве связующего материала можно применить двусторонний скотч или нейлоновые стяжки.
5.Солнечные панели.
В авторском варианте солнечные панели были собраны из отдельных солнечных элементов и показали низкий КПД, неэффективность. Поэтому в статье не приводятся чертежи для сборки солнечных панелей. Но для робота такого типа, с непрерывным потреблением напряжения, рекомендуется устанавливать заводские солнечные панели с большим выходным током. Подключение солнечных панелей осуществляется через разъёмы XT1,XT2 (фото.8). Монтаж к основной плате выполняют на стойках выполненных например из старой авторучки. Крепление осуществляется винтами M3. Как было сказано выше, установка солнечных панелей не обязательна и не оказывает влияния на поведение робота.

7.НАСТРОЙКА РОБОТА.
В архиве к роботу: монтажный чертёж, термокопия для перевода, список радиокомпонентов, инструкция по ЛУТ-переводу. Все чертежи в точных размерах! Чертёж термокопия готов к переводу, не зеркалить, не редактировать! Архив к статье "мультибот", пароль не требуется. Размер архива 1003,2kb Скачать архив Обратите внимание на монтаж микровыключателя питания (позиция SA1). Микровыключатель должен иметь пять контактов, из них три контакта на переключение и два контакта идущие непосредственно от корпуса. При монтаже тщательно пропаяйте все пять контактов. В схеме корпус микровыключателя (два крайних контакта) используется как дополнительный проводник, учитывайте это в случае его замены на идентичные.
На фото.5 (вид со стороны токоведущих дорожек) показан монтаж микропереключателя и инфракрасного светодиода. Микропереключатель (1 на фото.3) нажимной с металлической полоской (позиция SB3 на монтажном чертеже) припаивают горизонтально, со стороны токоведущих дорожек.
Инфракрасный светодиод (2 на фото.5) (позиция HL3 на монтажном чертеже) паяют со стороны токоведущих дорожек с соблюдением полярности подключения. Этот способ монтажа исключает прямую засветку резонансного фотомодуля (DA1) и возникновение помех.

фото.5.нажимайте для просмотра в полном размере
3.Монтаж и установка моторов.
В конструкции робота использованы моторы от старого CD-ROM проигрывателя типа PPN13LB11C, можно устанавливать и другие с низким рабочим напряжением. К печатной плате моторы крепятся с помощью подвески собранной из трёх пластин стеклотекстолита. Подвеска собирается по чертежу, приведённому на рис.2. Для её изготовления возьмите двухсторонний фольгированный стеклотекстолит толщиной около 1,5-2мм. Вырежьте основную опорную планку размерами 90х15мм. Затем просверлите в ней два отверстия на расстоянии 65мм друг от друга. Изготовьте две одинаковых боковых пластины размерами 25х15мм. На пластинах будут закреплены электродвигатели. Соберите изготовленные пластины, соединив их припоем ориентируясь по чертежу рис.2 и фото.4 показано чёрными стрелками.
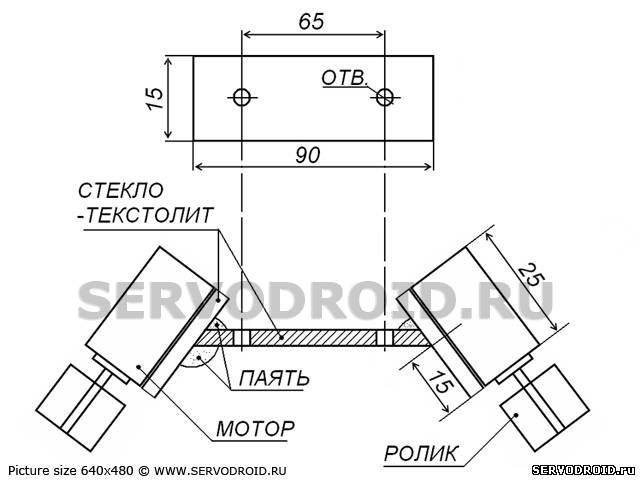
рис.2
Подвеску для моторов через стойки прикрепите винтами к основной печатной плате-корпусу робота. Установите моторы под углом приблизительно 300-450 к
поверхности платы (фото.6). Совместите моторы с пластинами и приклейте их
сильным клеем. На валы обоих двигателей наденьте резиновые ролики для
нормального сцепления с поверхностью (фото.6).
Валы моторов обеспечивают две точки опоры, а третьей является заднее шасси (фото.7 помечено белой стрелкой). Изготовьте его из большой канцелярской скрепки. При монтаже опоры подберите высоту и угол наклона. В месте прикрепления к печатной плате проденьте скрепку через отверстия "A”и "B”, затем запаяйте на квадратной площадке. Для качественного сцепления и облегчения пайки рекомендуется воспользоваться жидким нейтральным беспромывочным флюсом.
Валы моторов обеспечивают две точки опоры, а третьей является заднее шасси (фото.7 помечено белой стрелкой). Изготовьте его из большой канцелярской скрепки. При монтаже опоры подберите высоту и угол наклона. В месте прикрепления к печатной плате проденьте скрепку через отверстия "A”и "B”, затем запаяйте на квадратной площадке. Для качественного сцепления и облегчения пайки рекомендуется воспользоваться жидким нейтральным беспромывочным флюсом.
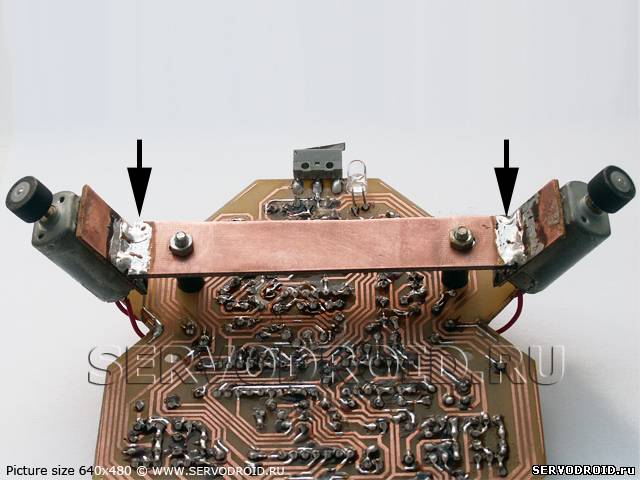 фото.6 | 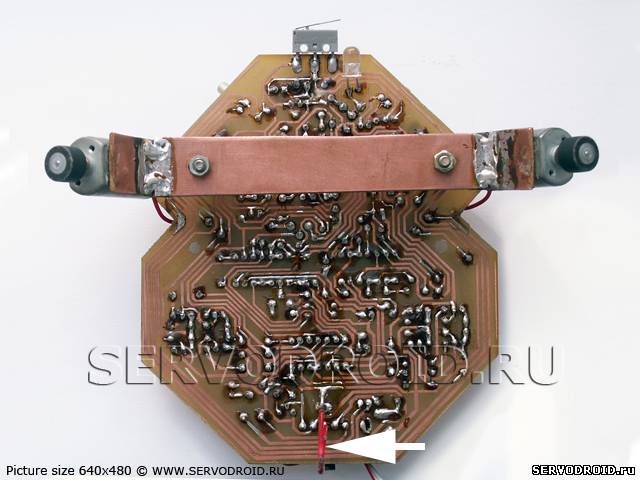 |
В качестве источника питания используется LIOH (литий-ионный) аккумулятор от старого сотового телефона с напряжением 3,6в или 3,7в. После зарядки на аккумуляторе будет напряжение около 4,15-4,25 вольта, что вполне достаточно для работы схемы. Зарядка выполняется с помощью зарядного устройства от сотового телефона. Для зарядки аккумулятора штеккер зарядного устройства необходимо подключить к гнезду XT3. Если полярность подключения окажется неверной, то защитный диод окажется запертым напряжение неправильной полярности на аккумулятор не поступит. Подзарядка аккумулятора осуществляется после установки выключателя SA1 в положении "зарядка". Основная схема будет отключена от аккумулятора, а зарядное устройство будет подключено. В схеме не предусмотрен контроль уровня заряда, поэтому степень зарядки придётся контролировать мультиметром. Аккумулятор крепят под днищем робота на подвеске для моторов. В качестве связующего материала можно применить двусторонний скотч или нейлоновые стяжки.
5.Солнечные панели.
В авторском варианте солнечные панели были собраны из отдельных солнечных элементов и показали низкий КПД, неэффективность. Поэтому в статье не приводятся чертежи для сборки солнечных панелей. Но для робота такого типа, с непрерывным потреблением напряжения, рекомендуется устанавливать заводские солнечные панели с большим выходным током. Подключение солнечных панелей осуществляется через разъёмы XT1,XT2 (фото.8). Монтаж к основной плате выполняют на стойках выполненных например из старой авторучки. Крепление осуществляется винтами M3. Как было сказано выше, установка солнечных панелей не обязательна и не оказывает влияния на поведение робота.

фото.8
7.НАСТРОЙКА РОБОТА.
Перед
настройкой убедитесь в том, что аккумулятор полностью заряжен.
1.ПРОВЕРКА ШИМ-ГЕНЕРАТОРОВ. Сначала проверим шим-регулировку, управляя подстроечными резисторами R15,R17 выставьте такую частоту вращения валов двигателей, при которой модель уверенно передвигается по поверхности. Медленную скорость выставлять не рекомендуется, в процессе работы аккумулятор будет разряжаться, и в какой-то момент робот просто остановиться. Нужно учитывать, чем выше выставленная скорость, тем лучше реакция на источник света, поэтому нужно искать такое положение для R15,R17 при котором все выше описанные условия соблюдены.
1.ПРОВЕРКА ШИМ-ГЕНЕРАТОРОВ. Сначала проверим шим-регулировку, управляя подстроечными резисторами R15,R17 выставьте такую частоту вращения валов двигателей, при которой модель уверенно передвигается по поверхности. Медленную скорость выставлять не рекомендуется, в процессе работы аккумулятор будет разряжаться, и в какой-то момент робот просто остановиться. Нужно учитывать, чем выше выставленная скорость, тем лучше реакция на источник света, поэтому нужно искать такое положение для R15,R17 при котором все выше описанные условия соблюдены.
2.ПРОВЕРКА ИК-ФОТОПРИЁМНИКА. Теперь
проверим
приёмник ик-излучения DA1 и отрегулируем
дистанцию обнаружения объектов. Для этого необходимо установить обе
секции
микропереключателя SB2 в положение - включено (ON). При этом секция
микропереключателя SB1.1 включает генератор ик-излучения. А секция SB2.1
блокирует прохождение импульсов управления с
выхода резонансного фотоприёмника DA1. Включите
робота микровыключателем SA1. Удерживайте
робота за боковые части печатной платы правой рукой так, чтобы колёса не
касались поверхности (пола). Приблизьте левую руку на расстояние
приблизительно
10-50см к фотоприёмнику DA1
расположенного в передней части печатной платы. Внимательно наблюдайте
за
светодиодом HL5 зелёного цвета свечения. Если светодиод
загорается во время приближения руки, значит, фотоприёмник DA1 принимает
отражённое ик-излучение. Остаётся
настроить дистанцию обнаружения с помощью подстроечного резистора R8.
Если светодиод HL5 не реагирует на приближение руки, то проверьте
установку всех элементов составляющих высокочастотный генератор на
элементах DD2.1,DD2.2, а также
цепи подключения фотоприёмника DA1.
При настройке не рекомендуется устанавливать минимальным сопротивление подстроечного резистора R8, так как это приведёт к непрерывной засветке фотоприёмника отражённым излучением от пола. Светодиод HL3 должен быть установлен параллельно к печатной плате, и располагаться корпусом под ней, чтобы исключить прямое попадание ик-излучения на фотоприёмник. Не допускается ориентация светодиода HL3 к полу, это приведёт к непрерывной засветке фотоприемника DA1.
После предварительной настройки установите робота на пол, он должен уверенно обнаруживать сплошные массивные объекты (стены, коробки и т.д.), после обнаружения робот поворачивает в сторону.
3.НАСТРОЙКА ТАКТИЛЬНЫХ СЕНСОРОВ. К сожалению, роботу не удаётся обнаружить тонкие ножки стульев тёмного цвета, так как они плохо отражают ик-излучение. Этот недостаток частично компенсируется установленным впереди микропереключателем SB3 с пластиной. Столкновение робота с препятствием и срабатывание микропереключателя SB3 должен вызвать отъезд назад с поворотом. Если этого не происходит проверяйте правильность монтажа диодов VD16,VD17.
При настройке не рекомендуется устанавливать минимальным сопротивление подстроечного резистора R8, так как это приведёт к непрерывной засветке фотоприёмника отражённым излучением от пола. Светодиод HL3 должен быть установлен параллельно к печатной плате, и располагаться корпусом под ней, чтобы исключить прямое попадание ик-излучения на фотоприёмник. Не допускается ориентация светодиода HL3 к полу, это приведёт к непрерывной засветке фотоприемника DA1.
После предварительной настройки установите робота на пол, он должен уверенно обнаруживать сплошные массивные объекты (стены, коробки и т.д.), после обнаружения робот поворачивает в сторону.
3.НАСТРОЙКА ТАКТИЛЬНЫХ СЕНСОРОВ. К сожалению, роботу не удаётся обнаружить тонкие ножки стульев тёмного цвета, так как они плохо отражают ик-излучение. Этот недостаток частично компенсируется установленным впереди микропереключателем SB3 с пластиной. Столкновение робота с препятствием и срабатывание микропереключателя SB3 должен вызвать отъезд назад с поворотом. Если этого не происходит проверяйте правильность монтажа диодов VD16,VD17.
4.НАСТРОЙКА ФОТОСЕНСОРОВ. Переведите
секцию
SB2.1 в выключенное состояние. При этом высокочастотный
генератор 36кГц будет остановлен. Секция микровыключателя SB2.2 должна
быть в положении включено (ON). Обе секции микровыключателя SB1.1 и
SB1.2 в
положении выключено. Посветите фонариком на фотоэлементы BL1,BL2 или
установите робота боком по отношению к источнику яркого света, например
настольной лампе. Если монтаж радиокомпонентов выполнен без ошибок, то
робот
развернется, и будет двигаться по направлению к источнику света. Если
робот
"бежит” от источника света поменяйте полярность подключения выводов у
двигателей M1,M2.
5.НАСТРОЙКА УПРАВЛЕНИЯ ПДУ. Управление
роботом
с помощью пульта ДУ осуществляется, когда обе секции SB2 находятся в
положении выключено, а обе секции SB1 в положении включено (ON). Если вы
хотите, чтобы робот ещё и обнаруживал дистанционно
препятствия в режиме ДУ, то переведите секцию микровыключателя SB2.1 в
положение включено (ON). Но при этом измениться стиль поворота робот
будет просто
отъезжать назад при каждом нажатии на кнопку ПДУ. Сборка окончена!
 фото.9 |  фото.10 |
Пароль к архиву mux100Авторство на статью принадлежит ©
[url=http://www.servodroid.ru]SERVODROI.RU -Робототехника для
начинающих своими руками[/url]. Если Вы читаете это сообщение
пожалуйста, [url=http://www.servodroid.ru]сообщите нам[/url].
Пароль к архиву mux100.Авторство на статью принадлежит ©
[url=http://www.servodroid.ru]SERVODROI.RU -Робототехника для
начинающих своими руками[/url]. Если Вы читаете это сообщение
пожалуйста, [url=http://www.servodroid.ru]сообщите нам[/url].
Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим!
автор Алексей
Высоковольтный
www.servodroid.ru
| Всего комментариев: 13 | |


| |




