22:42 ПРОСТОЙ ВИБРОБОТ | ||||||||||||||||||
 ВИБРОБОТ - это робот, который передвигается за счёт направленных волн вибрации. Слово вибрация произошло от латинского Vibration - колебания, дрожание. Вибрация представляет собой циклические механические колебания. Робот передвигается за счёт быстрых колебаний мелких щетинок на зубной щётке используемой в качестве движителя.
В качестве эксперимента было собрано два варианта вибробота с разными источниками питания и моторами разных типов. Инструкция по сборке стандартная, поэтому по одной инструкции, в зависимости от наличия у вас тех или иных моторов можно собрать любой из вариантов. ***
1.ВИДЕОТЕСТЫ
Через панель навигации видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель навигации доступна после запуска видео, справа внизу значок пиктограммы. Перед запуском каждого видеофрагмента автоматически выводится его название в верхнем левом углу. В нижней части окна проигрывателя слева название плейлиста и количество сгруппированных видеофрагментов.
В представленных видео показаны два варианта исполнения робота с разным типа моторов и источников питания.
по поверхности в ограниченном препятствиями пространстве.
В настоящей статье приводится описание первого варианта. Сборка второго варианта аналогична первому с использованием тех же инструкций и чертежей. На фото.1, показан вибробот-1 с питанием от батареи 9 вольт. На фото.2, показан вибробот-2 с питанием от батареи 3 вольта.
нажимайте фото для просмотра в полном размере
3.ИНСТРУКЦИЯ ПО СБОРКЕ.
Для правильной сборки придерживайтесь инструкций по сборке. Редактировать, масштабировать чертежи в архиве нельзя, так как все чертежи архива в точных размерах. Скачайте архив размещённый в конце статьи!
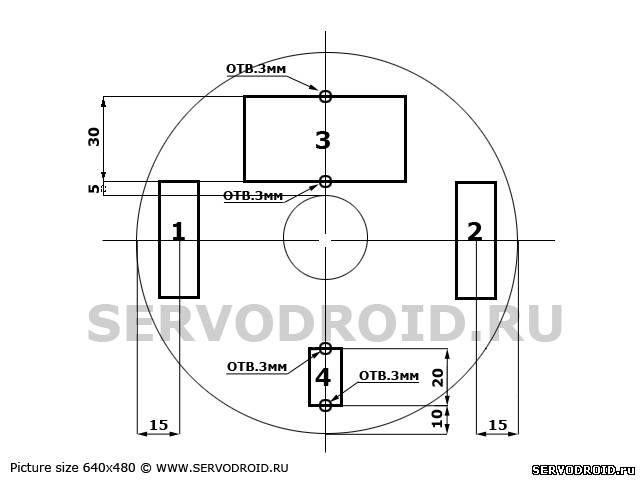
В качестве основы для монтажа всех компонентов возьмите CD или DVD диск. На чертеже рис.1 показано размещение отверстий с разметкой позиций под компоненты. Все отверстия необходимо отсверлить сверлом диаметром 3мм. Отверстия рассчитаны из учёта использования в качестве крепежа нейлоновых стяжек. Если предполагается иной способ крепления, то отверстия могут иметь любой диаметр. Разметка на рис.1 подходит под оба варианта сборки роботов с установкой как батареи 9V так и футляра.
На рис.1: 1,2-щётки, 3-батарея 9V, 4-мотор 5,9V.
2.ИЗГОТОВЛЕНИЕ И МОНТАЖ ДВИЖИТЕЛЕЙ.
Движители приводят в движение робота. Для изготовления движителей вам потребуется две зубных щётки. Лучше если они будут иметь одинаковую поверхность щетины. Если поверхность щетины одной щётки отличается от другой аккуратно подравняйте её ножницами (фото.5). Придайте щетине направление (фото.6). Для этого Возьмите прозрачный скотч или изоленту и придав наклон щетине обмотайте щётку в области щетины в несколько слоёв. Теперь необходимо подождать около 40-60 минут для того чтобы щетина зафиксировалась в наклонном положении. Серая стрелка на фото.6 показывает направление в котором необходимо придавать наклонное положение щетины. На фото.6: 1-обмотка прозрачным скотчем, 2-щётка, 3-прозрачный скотч.
После того как щетине будет придана наклонная форма разматывайте скотч и отрежьте часть зубной щетки со щетиной. Затем воспользуйтесь клеевым пистолетом (фото.7) для крепежа зубных щёток на диске (фото.8). Позиции, на которые необходимо установить зубные щётки показаны на чертеже рис.1. Приклеивание с помощью термического клея нужно проводить быстро, так как клей быстро остывает. Во время приклеивания постарайтесь, чтобы щетки были установлены параллельно друг другу. ВНИМАНИЕ! щётки приклеивайте так, чтобы их щетина была направлена назад, то есть в сторону установленной батареи 9V! Робот будет двигаться в сторону противоположную направлению щетины. Когда щетина направлена назад, робот будет двигаться вперёд. На фото.8: 1-зубная щётка, 2-термоплавкий клей, 3-отверстия для монтажа мотора, 4-отверстия для монтажа батареи. Белыми стрелками показано правильное направление щетины.
3.ИЗГОТОВЛЕНИЕ ЭКСЦЕНТРИКА. Для создания вибрации на вал мотора одевается эксцентрик. Эксцентрик-это груз со смещением центра тяжести. Изготовьте эксцентрик из новой стёрки отрезав от неё часть. Размеры эксцентрика указаны на фото.9. В указанном месте проделайте отверстие. Отверстие не должно быть большим иначе стёрка-эксцентрик будет слетать с вала мотора при работе. На вал мотора установите через отверстие стёрку-эксцентрик (фото.9).
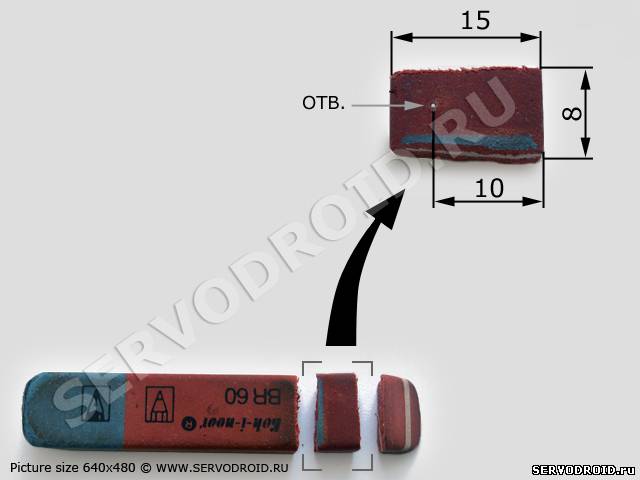 фото.9
4.ИЗГОТОВЛЕНИЕ ЗАЩИТНОГО КОЖУХА. Вибрацию конструкции вызывает стёрка закреплённая на валу двигателя. Сразу при включении стрёрка быстро вращается. Чтобы защитить глаза изготовьте защитный кожух. Он выполнен в виде цилиндра из нескольких слоёв бумаги скреплённый прозрачным скотчем. И так приступим:
-Скачайте архив в конце статьи и распечатайте на обыкновенной или плотной бумаге. -Вырезайте ножницами выбранный чертёж. Обратите внимание для каждого типа мотора подготовлены свои чертежи. -Возьмите лист с клейкой поверхностью, например фотобумагу и приклейте выполненную распечатку. При отсутствии листа с клеющей поверхностью воспользуйтесь сухим клеем или любым другим не коробящим лист (фото.10, фото.11). -Возьмите мотор, который вы будете устанавливать в конструкцию робота и обмотайте распечатанным и склеенным листом вокруг(фото.12,фото13). -Обматывайте прозрачным скотчем поверх бумажного цилиндра для скрепления. Обмотку прозрачным скотчем нужно проводить осторожно, чтобы не покоробить форму цилиндра! Это важно так как внутри будет вращаться стёрка-эксцентрик. на фото.12,фото.13 показаны варианты защитных кожухов для разных типов моторов.
5.МОНТАЖ МОТОРА, ИСТОЧНИКА ПИТАНИЯ И ПОДКЛЮЧЕНИЕ. Установите мотор в кожухе на позицию и продев через отверстия нейлоновую стяжку закрепите (фото.14, фото.15). Нейлоновые стяжки можно приобрести в магазинах торгующих строительными, отделочными материалами. В упаковке нейлоновые стяжки могут иметь разную длину рекомендую приобретать длинные. Нейлоновые стяжки помечены белыми стрелками.
Аналогично закрепите батарею. Обратите внимание на фото.14 (вид сверху) батарея размещена точно по центру. Вы должны знать, что смещение батареи от центра приведёт к изменению траектории передвижения робота (см. видео.4). Таким не хитрым способом можно задавать траекторию передвижения. На фото.14 и фото.15 показаны варианты монтажа для разных типов моторов и батареек.
Выполните соединения мотора и батареи с помощью клипсы-разъёма. Красный провод клипсы-разъёма подсоедините к красному проводу от мотора, а чёрный провод от клипсы-разъёма к чёрному проводу мотора. Соединения в этом варианте можно выполнять как скруткой, так и пайкой. После соединений изолируйте провод и прикрепите его кусочком изоленты или скотча к поверхности диска. На фото.16 показан полный монтаж для первого варианта вибробота. На фото.17 показан полный монтаж для второго варианта вибробота. В этом варианте для включения-выключения необходимо установить микровыключатель питания на поверхности диска рядом с отсеком для батареек. Все соединения выполняйте пайкой. В качестве источника питания установлен футляр с двумя элементами суммарным напряжением 3 вольта. Такое низкое напряжение питания обусловлено использованием мотора от детских игрушек. Мотор от детских игрушек как правило имеет низкое рабочее напряжение питания и больший ток потребления.
6.ВКЛЮЧЕНИЕ РОБОТА. Включение-выключение вибробота собранного по первому варианту выполняют с помощью клипсы-разъёма. Клипса-разъём должна быть одета на разъём батарейки только одним контактом. Чтобы включить-выключить робота поворачивайте клипсу-разъём вокруг своей оси, от момента размыкания до момента замыкания со вторым контактом батареи.
Включение-выключение вибробота собранного по второму варианту выполняют с помощью размещённого на диске микровыключателя. Для получения максимальной скорости передвижения нужно, чтобы вал мотора вращался в определённом направлении. Если использованы моторы указанные в статье, подключены и установлены по инструкции, то указанной выше проблемы не будет. Во всех остальных случаях (использование других моторов и т.д) определить нужное направление вращения вала не сложно. Проведите первый запуск робота, затем поменяйте полярность подключения к мотору и проведите ещё один запуск. Сравните скорости передвижений в первом и во-втором вариантах, выберите наиболее быстрый вариант. Сборка окончена!
Скачать архив Архив к статье "простой вибробот", пароль не требуется. Размер архива 345,8kb Пароль к архиву mux100Авторство на статью принадлежит ©
SERVODROI.RU -Робототехника для начинающих своими руками. Если Вы читаете это сообщение пожалуйста, сообщите нам. Пароль к архиву mux100.Авторство на статью принадлежит ©
SERVODROI.RU -Робототехника для начинающих своими руками. Если Вы читаете это сообщение пожалуйста, сообщите нам.
Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим!
автор Алексей Высоковольтный www.servodroid.ru © Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
| ||||||||||||||||||
|
| ||||||||||||||||||
















| Всего комментариев: 18 | |

| |
 Круто, начинающим самое то !
Круто, начинающим самое то !


 Только я все на клей посадил.
Только я все на клей посадил.





