20:35 ПУЛЬТОИД | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 ПУЛЬТОИД - это простой робот, которым можно управлять с помощью любого пульта дистанционного управления, например от телевизора. Нередко от начинающих робототехников поступают просьбы по размещению на сайте простых в сборке роботов. Идя навстречу пожелания публикуем робота "Пультоид". Для его сборки не требуется изготовление печатной платы, монтаж предельно простой и выполняется на картонке. Схема робота выполнена из четырёх радиокомпонентов: одном транзисторе, диоде, конденсаторе и распространённом фотоприёмнике. В конструкции использованы доступные материалы, например в качестве корпуса использован компакт диск. ***
На видео.1 показано управление с помощью пульта ДУ. Робот выполняет поворот при нажатии любой кнопки на пульте. Чем дольше удерживается кнопка, тем продолжительней поворот и робот повернёт на больший угол.
Видеофрагмент 1
ВСЕ РОБОТЫ на канале SERVODROID !!! подпишись и смотри. Переход по ссылке жми!
нажимайте фото для просмотра в полном размере.
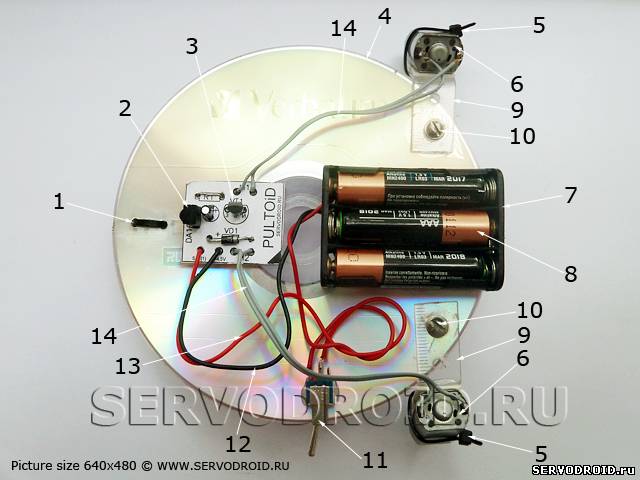
КОНСТРУКЦИЯ. В качестве корпуса и основания для монтажа использован компакт диск. Крепёж силовых частей(шасси) выполнен с помощью винтов M2. Крепёж платы с радиокомпонентами и футляра для батареек выполнен с помощью двустороннего скотча. Передняя опора выполнена нестандартно и представляет собой петлю из нейлоновой стяжки. В дополнению к своей прямой функции, петля даёт ещё и амортизационный эффект.
МОТОРЫ. Моторы расположены под углом к поверхности корпуса. Моторы закреплены на силовых рамах выполненных из школьной линейки. В конструкции робота осуществляется прямая передача момента вращения с вала мотора на поверхность передвижения. Для увеличения коэффициента трения с поверхностью на валы моторов надеты протекторы из резины. ИСТОЧНИК ПИТАНИЯ. Питание осуществляется от трёх гальванических элементов "3A" ("мизинчиковые") установленные в трёхсекционном футляре для батареек. В сумме источник питания даёт напряжение 4, 5 вольт. ФОТОДЕТЕКТОРЫ. На плате расположен всего один фотоприёмник типа TSOP, который принимает модулированные сигналы от ПДУ (пульт дистанционного управления). Управление роботом осуществляется с помощью ПДУ, нажатием на любую выбранную кнопку. После кратковременного нажатия кнопки робот поворачивает на небольшой угол. Удержание кнопки приводит к повороту на больший угол.
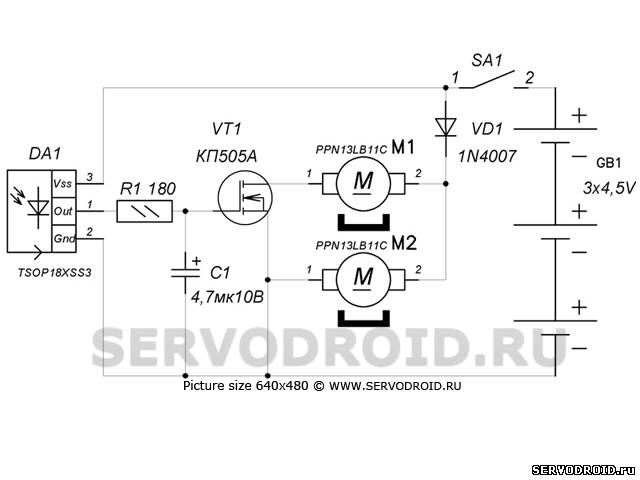
Электрическая схема робота представлена на рис.1. Электрическая схема Состоит из фотоприёмника TSOP принимающего инфракрасный сигнал на резонансной частоте, цепочки из резистора и конденсатор, полевого транзистора управляющего мотором и диодом.
После включения питания электрическая цепь через диод VD1 оказывается замкнутой для мотора M2 и его вал начинает вращаться. Одновременно поступает питание +4,5В на фотоприёмник DA1. При отсутствии инфракрасного сигнала на выходе 1 фотоприёмника DA1 устанавливается положительный потенциал. Подключенный через резистор R1 конденсатор C1 быстро заряжается и на его верхней (по схеме) обкладке устанавливается тоже положительный потенциал. Так как верхняя (по схеме) положительно заряженная обкладка конденсатора подключена к затвору полевого транзистора VT1, то такой же потенциал (положительный) устанавливается и на его затворе. При достижении потенциала равного примерно 2 вольта, в следствии зарядки конденсатора, сопротивление канала полевого транзистора резко падает. Через канал сток исток полевого транзистора, диод VD1 и мотор M1 начинает протекать ток. Вал мотора M1 начинает вращаться. Все вышеописанные процессы приводят к включению обоих моторов, робот начинает двигаться вперёд.
Печатная плата изготовлена из односторонне фольгированного листа стеклотекстолита толщиной 1-1,5мм. Размеры печатной платы 30х25мм. Список радиокомпонентов приведён в таблице.1. Ссылка на архив с чертежами и разводкой под ЛУТ размещена в конце статьи! Всё чертежи в архиве в точных размерах. Не редактировать, не масштабировать!
Скачайте архив в конце статьи. Распечатайте лицевую(монтажный чертёж) и обратную сторону (bottom) на листе белой офисной бумаги формата А4. Печатная плата изготавливается из трёх слоёв и представляет собой наклеенные с двух сторон листы бумаги на гофрокартон (фото.4). Подготовьте лист тонкого гофрокартона размерами больше, чертежей в архиве. На фото.4 в правом нижнем углу показан гофрокартон в разрезе. Вырезайте монтажный чертёж(1) и чертёж bottom(2) по контурам. Наклейте чертежи с двух сторон на гофрокартон так, чтобы совпали отверстия. Чтобы облегчить задачу совмещения воспользуйтесь чёрными треугольниками(3) на углах чертежей плат. После склеивания чёрные треугольники должны быть на одном угле. Склеивание рекомендуется проводить сухим клеевым карандашом. Для желающих изготовить печатную плату по лут-методу из стеклотекстолита в архиве присутствует чертёж в точных размерах термоклише.
нажимайте фото для просмотра в полном размере.
Монтаж на картонную основу имеет свои особенности. Главное правило при таком монтаже: не обрезать выводов радиокомпонентов после их установки на посадочные места! Это необходимо для того, чтобы после установки деталей загнуть их выводы и соединить между собой. После пайки в местах соединений рекомендуется выполнять обрезку выводов радиокомпонентов лишней длины.
И так приступим. Установите все указанные в таблице 1 радиокомпоненты на свои позиции, согните выводы по направлениям "токоведущих" линий, выполните пайку в местах соединений (фото.5). Для правильной установки фотоприёмника TSOP1836 (DA1) на фото.5 в нижнем правом углу приведена нумерация выводов. Вместо резистора R1 установите перемычку из любого провода.
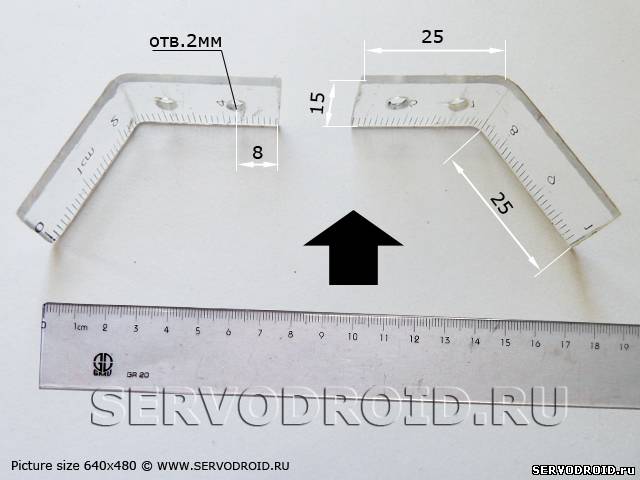
Моторы устанавливают на силовой раме, которую вам потребуется изготовить. В качестве материала для силовой рамы возьмите школьную пластиковую линейку. Разрежьте её пополам выгните с размерами указанными на фото.6. Для того чтобы согнуть линейку приблизьте её к жалу разогретого паяльника на расстояние 2-3мм. Если есть горячий монтажный фен, то выполнить сгиб линейки будет ещё проще. Несильно надавливая на края начинайте постепенно сгибать линейку до тех пор пока не согнёте под углом примерно 30-35 градусов. После того как силовая рама будет готова переходим к корпусу. Выберите любой компакт диск(1) и винты с гайками(2) диаметром 2мм (фото.7).
нажимайте фото для просмотра в полном размере.
Возьмите компакт диск и просверлите отверстия диаметром не менее 2мм для крепежа силовой рамы. Смонтируйте силовую раму так как показано на фото.8. На боковые поверхности прикрепите полоски двустороннего скотча (фото.9). Эти полоски в дальнейшем устранят проскальзывание моторов после крепежа и обеспечат фиксацию на позициях.
нажимайте фото для просмотра в полном размере.
Подготовим всё необходимое для установки и крепежа передней опоры. В передней части диска просверлите два отверстия (фото.10). Возьмите нейлоновую стяжку чёрного цвета размерами 3х150мм (длина 150мм, ширина 3мм)(фото.11). Нейлоновая стяжка имеет на конце замок. Проденьте нейлоновую стяжку через отверстия так, чтобы замочек был впереди (фото.12, фото.13). После установки стяжки получиться петля размер которой должен быть по высоте клиренса (отступ от поверхности диска) равен высоте нижней кромки силовой рамы. Установленная петля-опора обладает высокими амортизирующими и скользящими свойствами.
нажимайте фото для просмотра в полном размере.
Перед установкой на позиции на вал каждого мотора необходимо надеть протекторы. Они обеспечат устранение проскальзывания и повышенное сцепление с поверхностью при движении. Где взять протекторы? Очень просто, купите два однотипных гелиевых стержня и снимите с них защитные резиновые колпачки. Эти колпачки и будут протекторами (фото.14).
Колпачок может иметь больший диаметр отверстия и следовательно проскальзывать на валу мотора. Чтобы колпачки не проскальзывали на валу моторов, можно предварительно намотать изоленту 3-4 слоя. Изоленту рекомендуется взять импортного производства, так как она обладает повышенными клеевыми свойствами и обеспечит надёжное сцепление с валом. Если есть термопластичная трубка(2) малого диаметра, то её тоже можно использовать для устранения проскальзывания колпачка-протектора(1) (фото.15). Перед установкой моторов снимите защитную поверхность с двустороннего скотча. Установите моторы на позиции и прижмите для того, чтобы скотч сцепился с поверхностью мотора. Закрепите каждый из моторов нейлоновой стяжкой(3) на поверхности силовой рамы, отрежьте лишнюю длину стяжки (фото.15, фото.16).
нажимайте фото для просмотра в полном размере.
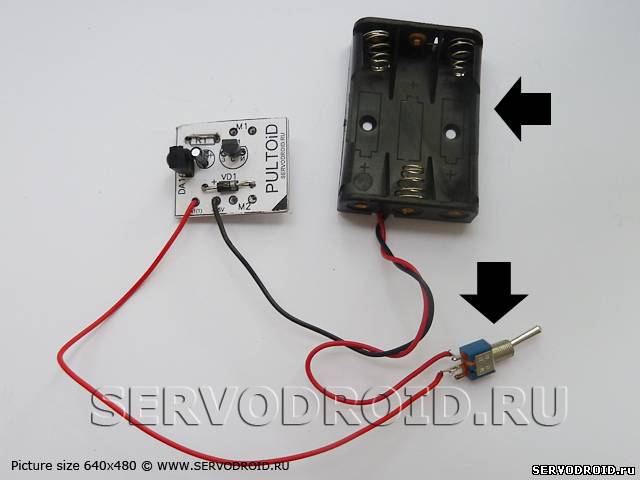
После установки и крепежа моторов (фото.16) приступайте к подключению источника питания (футляра) и выключателя питания. В конструкции можно использовать любой источник питания с напряжением не превышающим 5 вольт! В моём варианте установлен трёхсекционный футляр с батарейками типоразмера "AAA" ("мизинчиковые"). Функции выключателя питания выполняет перекидной малогабаритный выключатель с двумя фиксируемыми положениями тумблерного типа. Выключатель питания необходимо подключить в разрыв плюсового провода(красного) идущего от источника питания (фото.17). Второй провод(красный) идущий от выключателя к плате необходимо подсоединить через отверстие SA1(1). Минусовой(чёрный) провод идущий от источника питания(футляр) подключите к плате через отверстие -4,5V.
нажимайте фото для просмотра в полном размере.
Найдите на плате отверстия для подключения моторов. Они обозначены как M1 и M2. Выполните соединения моторов с отверстиями на плате с помощью тонких монтажных проводов. Удобнее всего взять монтажный проводок от компьютерного шлейфа, отщепите сразу по два проводка (фото.18). Для наглядности на фото.19 показан вид платы со стороны соединений.
нажимайте фото для просмотра в полном размере.
К плате со стороны соединений приклейте полоску двустороннего скотча (фото.20). К днищу футляра для батареек тоже приклейте полоску двустороннего скотча. Прикрепите на скотче в передней части диска плату с радиокомпонентами, а рядом с моторами футляр для батареек. Чтобы выключать питания не болтался прикрепите его к поверхности компакт диска термоплавким клеем (фото.21).
нажимайте фото для просмотра в полном размере.
В архиве: монтажный чертёж печатной платы, bottom-чертёж, термокопия для лут-перевода печатной платы.
Архив к статье Пультоид пароль не требуется. Все чертежи в точных размерах, не изменять, не редактировать! Размер архива 119,5Kb Скачать архив
Автор Алексей Высоковольтный www.servodroid.ru
©Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований. Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


















| Всего комментариев: 43 | |



Ответ: фотоприёмники дествительно схожи и по подключению выводов и по характеристикам, поэтому дело не в них. -Если работает мотор M2, то не правильно подключен транзистор КП505. Перепутаны выводы затвора, стока и истока. Пересмотрите схему подключения выводов транзистора на фото и рисунках. -Вероятен также обрыв соединения по выводам транзистора, нужно их пропаять.-Обратите внимание на выводы резистора R1, возможно при пайке оторван вывод или не пропаян.
| |













