00:28 МиниСумо на аналоговых элементах | ||
 РОБОТ МИНИСУМО - Как сделать робота-борца без использования микроконтроллеров. Турнир роботов "МиниСумо" могут показать, что этот тип робота более интересное занятие. Для тех, кто работает с аналоговыми элементами, этот робот для них. Желание построить роботов, является желание многих начинающих в области робототехники. Но как только мы собрали первого простейшего робота из нескольких компонентов, появляется желание сделать робота на микроконтроллерах. Это у новичков всегда - спешка. Сборка выполнена по статье из журнала Журнал Electronique_Pratique-304_2006-April, с.30. от автора F. Giamarchi. Статья публикуется с разрешения автора! |

1.ВИДЕОТЕСТЫ
На видео.1 показано тестирование робота Сумо на ринге. На видео.2 соревнования на ринге между тремя роботами сумоистами.
Видео.2
Для робота Сумо есть минимальные требования в регулировках и настройках. Кроме того, размеры 10 см х 10 см и весом не более 500 г, Чтобы быть эффективным, робот должен обнаруживать противника, подойти к нему и вытолкнуть его из круга 77 см. Он должен обнаружить белое поле по кругу, чтобы не выйти за поле, и запускаться только через пять секунд. Поэтому предлагается для удовлетворения этих различных критериев решить это с помощью аналоговых схем.
На фото.1, фото.2 собранный по инструкциям робот минисумо.
 Фото.1 |  Фото.2 |
Механическая часть робота не является целью данной статьи. Мы не сомневаемся, что после того, как сделан это робот, вы захотите улучшить ходовую часть, шины или колеса для увеличения силы сцепления, например, в первую очередь. Механические использует блок из двух двигателей и двух колес. Выбранный дизайн зависит от вашей фантазии и наличия материалов. Не стесняйтесь представить себе различные конструкции.
Буквенные обозначения приведённые в схемах робота зарубежного журнала отличаются от общепринятых. Будьте внимательны!
Для обнаружения противника используются два инфракрасных датчика отражения, но вполне можно использовать более продвинутые датчики типа Sharp GP2D12. Чтобы обнаружить белые границе черного круга, используем два датчика, отражающего инфракрасное излучение.
Первая плата(материнская плата). Она крепится на борту робота. На ней установлены разъемы для остальных плат. Эта последняя плата обеспечивает различные соединения между платами и датчики, двигателями и батарей, и дополнительно содержит стабилизатор с напряжением стабилизации 5 вольт для питания всей схемы.
Третья плата(датчики обнаружения противника) обрабатывает сигналы с датчиков обнаружения противника. Каждый из датчиков будет увеличивать скорость противоположного двигателя, когда он обнаруживает что-то. Задается фиксированная скорость движения робота и величина ускорения.
Четвёртая плата(плата позиционных датчиков). Каждая пара датчиков определяют действие робота. Первый датчики определяют контур круга, который окрашен в белый цвет, в то время как остальная часть круга в черный. Если один или оба датчики обнаруживают край белый, то нужно изменить направление вращения двигателей робота, чтобы вернуть его обратно. Но полная функция позволяет роботу выполнять небольшим поворотом на себя перед движением вперед.
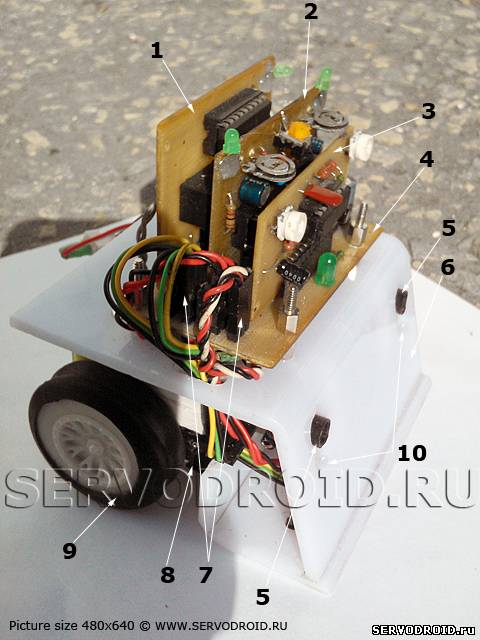 | КОМПОНЕНТЫ КОНСТРУКЦИИ РОБОТА 1.Плата двигателей (драйвер). 2.Плата движения назад и разворота. 3.Плата регулировки скорости. 4.Материнская плата. 5.Фотоприёмник. 6.Корпус. 7.Разъёмы соединения. 8.Привод от игрушки-танка. 9.Колесо. 10.Светодиоды инфракрасного спектра свечения. Примечание 1. Плата датчика обнаружения противника расположена внутри корпуса рядом с ковшом, поэтому не видна на фото.3. Обнаружение осуществляет фотоприёмник с цифровым выходом IS471F. Примечание 2. Обнаружение края ринга осуществляется с помощью аналоговой оптопары SG-2BC. Оптопара крепиться отдельно от печатной платы на днище робота и соединяется через разъёмы с материнской платой. фото.3.нажимайте фото для просмотра в полном размере. |
Эта карта является связующим звеном между всеми элементами робота. Здесь находятся различные разъемы для плат управления и платы питания, датчиков, батарей и двигателей. Четыре разъема для датчиков распределены по два разъема, также подает напряжение питания 5 вольт. Третий разъем для подключения аккумуляторной батареи. Три разъема для плат управления и два для двигателей. Стабилизатор можно использовать любой на 5 вольт. После сборки материнской платы, можно проверить ее, подав напряжения, светодиод должен загореться.
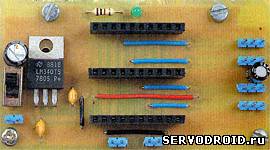
фото.4
Табл.1. Список радиокомпонентов материнской платы.
| Позиция | Наименование | Примечание | Количество |
| R1 | 1кОм | мощность 0,125Вт | 1 |
| C1 | 470мкФ16В | 1 | |
| C2,C3 | 0,1мкФ | 2 | |
| C4 | 22мкФ или 47мкФ16в | 1 | |
| D1 | L3014GD | или аналогичный светодиод в корпусе диаметром 3мм зелёного цвета свечения | 1 |
| CI1 | LM2940-5 | или стабилизатор 7805 | 1 |
| S1 | малогабаритный микровыключатель | подходящий по габаритным размерам | 1 |
| K1 и K3, K7 и K10 | однорядные штыревые линейки 3pin | используется часть от штыревой линейки, только 3 вывода | 4 |
| K4, K5, K6 | однорядные гнездовые линейки 10pin | используется линейка на 10 разъёмов | 3 |
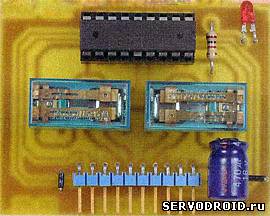
фото.5
Табл.2. Список радиокомпонентов платы драйвера двигателей.
| Позиция | Наименование | Примечание | Количество |
| R1 | 1кОм | мощность 0,125Вт | 1 |
| C1 | 470мкФ16В | 1 | |
| D1 | L3014URD | или аналогичный светодиод в корпусе диаметром 3мм красного цвета свечения | 1 |
| CI1 | ULN2803 | | 1 |
| RE1,RE2 | реле G5V-2-H1 | реле постоянного тока с рабочим напряжением обмотки 5 вольт, имеет две пары переключающих контактов | 2 |
| K1 | однорядные штыревые линейки 10pin | используется штыревая однорядная линейка на 10 разъёмов | 1 |
На этой плате используем микросхему LM324. Нет необходимости в микроконтроллер для этого. На первом элементе задается частота с помощью R5 и С2, примерно 10 кГц (рис. 7). Еще одна особенность этой платы является 22 мкФ конденсатор C1, который будет блокировать запуск двигателей около 5 секунд. На плату приходят аналоговые сигналы от датчиков, такие как Sharp GP2D12. Но на нашей схеме стоят IS471F. Регулировка сводится к установке скорости двигателей на среднем уровне, что бы он медленно двигался вперед.
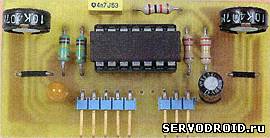
фото.6
Табл.3. Список радиокомпонентов платы регулировки скорости.
| Позиция | Наименование | Примечание | Количество |
| R1,R4 | 330 Ом | мощность 0,125Вт | 2 |
| R2,R3 | 220кОм | мощность 0,125Вт | 2 |
| R5 | 10кОм | мощность 0,125Вт | 1 |
| RV1,RV2 | 10кОм | резисторы переменного сопротивления вертикальной установки | 2 |
| C1 | 22мкФ16в | 1 | |
| C2 | 4,7нФ | 1 | |
| C3 | 33мкФ16В | 1 | |
| CI1 | LM324 | 1 | |
| S1 | малогабаритный микровыключатель | подходящий по габаритным размерам | 1 |
| K1 | однорядные штыревые линейки 10pin | используется штыревая однорядная линейка на 10 разъёмов | 4 |
Это особенно важно потому, что необходимо предотвратить выход робота с поля. На этой плате реализовано два генератора регулируемой частоты на двух микросхемах NE555. При попадании датчиков линии на белое поле, сигнал подается на драйвер двигателя и переключает реле в обратное направление движения двигателей. Один из генераторов задает время движения назад, второй задает поворот робота, отключая один из двигателей.
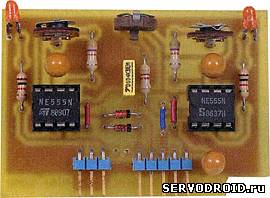
фото.7
| Позиция | Наименование | Примечание | Количество |
| R1 | 4,7кОм | мощность 0,125Вт | 1 |
| R2,R4 | 47кОм | мощность 0,125Вт | 2 |
| R3,R5 | 1кОм | мощность 0,125Вт | 2 |
| RV1 | 47кОм | резисторы переменного сопротивления вертикальной установки | 1 |
| RV2,RV3 | 220кОм | резисторы переменного сопротивления вертикальной установки | 2 |
| C1,C2,C3 | 10мкФ16в | 3 | |
| C4 | 0,1мкФ | 1 | |
| D1,D2 | 1N4148 | замена на КД521 или КД522, но с учётом полярности !!! | 2 |
| D3,D4 | L3014URD | или аналогичный светодиод в корпусе диаметром 3мм красного цвета свечения | 2 |
| CI1,CI2 | NE555 | 2 | |
| K1 | однорядные штыревые линейки 10pin | используется штыревая однорядная линейка на 10 разъёмов | 4 |
Два датчика используются для обнаружения белой линии и два датчика для обнаружения противника. Датчики белой линии подключаются напрямую к материнской плате. Датчики обнаружения противника собираются на небольшой плате. Датчик обнаружения белые линии использует отражающий оптический эффект -SG-2BC содержащий инфракрасный диод и фото транзистор (рис. 13). Для оптимального использования этого компонента, диод включен последовательно с сопротивлением 220 Ом. Обнаружение противника осуществляется с помощью IS471F. Этот компонент является датчиком препятствия с релейным выходом. Он включает в себя сложную электронику, но требует внешнего инфракрасного светодиода.
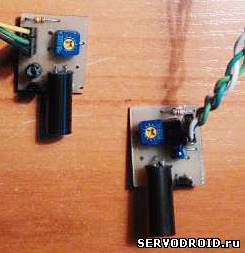 фото.8 |  фото.9 |
На фото.8 показаны датчики в сборке. На фото.9 датчики установлены в передней части робота за ковшом. Белой стрелкой помечена установленная плата датчиков.
Табл.5. Список радиокомпонентов платы датчики.
| Позиция | Наименование | Примечание | Количество |
| R1,R2 | 1кОм | мощность 0,125Вт | 1 |
| R3,R4 | 220 Ом | мощность 0,125Вт | 1 |
| RV1,RV2 | 10кОм | резисторы переменного сопротивления вертикальной установки | 2 |
| C1,C1 | 1мкФ16В | 2 | |
| D1,D2 | LD271 | или любые светодиоды инфракрасного спектра свечения | 2 |
| CI1,CI2 | IS471F | фотоприёмник с модуляцией сигнала | 2 |
| OP1,OP2 | SG-2BC | аналоговая оптопара с открытым каналом | 2 |
8.УСТАНОВКА МОТОРОВ И АККУМУЛЯТОРОВ.
Для проведения состязаний робот миниСумо должен развивать некоторое усилие на колёсах, потому устанавливать моторы необходимо с редуктором. В нашем варианте использован редуктор от игрушечного танка. Разберите игрушку-танк, аккуратно извлеките редуктор, разберите его и распилите корпус редуктора ровно пополам. Установите шестерёнки на свои места. Далее используйте каждую из половинок корпуса редуктора для двух моторов (правого и левого). Собранные и установленные на свои места половинки редуктора можно видеть на фото.10.
Источник питания (аккумулятор) расположите в нижней части робота и закрепите любым доступным способом (фото.11).
 фото.10 | 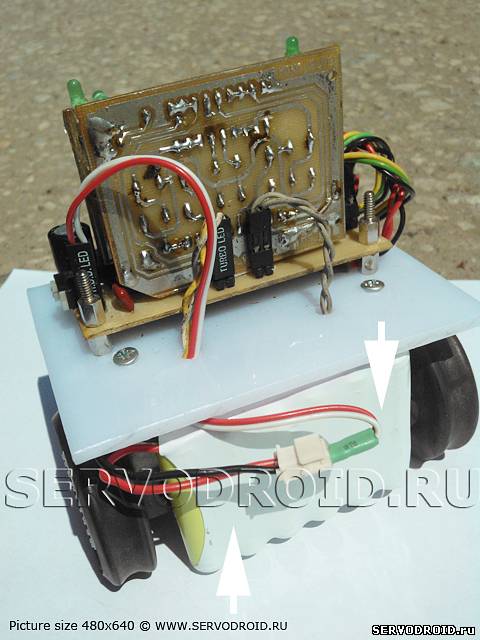 фото.11 |
Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим!
Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований.
Мы очень рады,
что наши статьи помогут тебе - начинающему робототехнику, освоить эту интереснейшую сферу и прокачать свой скилл в этом направлении. Также хотим отметить, что по данным статьям мы - разработчики сайта SERVODROID проводим занятия в бесплатных кружках робототехники, и нам очень нравится учить и рассказывать что такое BEAM-робототехника всем желающих.
Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;)
Начни общаться на нашем Форуме или Онлайн-чате
[ Стать участником сайта / Авторизоваться ]
| Всего комментариев: 7 | |
|
| |

